
一种方便连续上下料的工业锻造用机器人.pdf

努力****元恺

1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种方便连续上下料的工业锻造用机器人.pdf
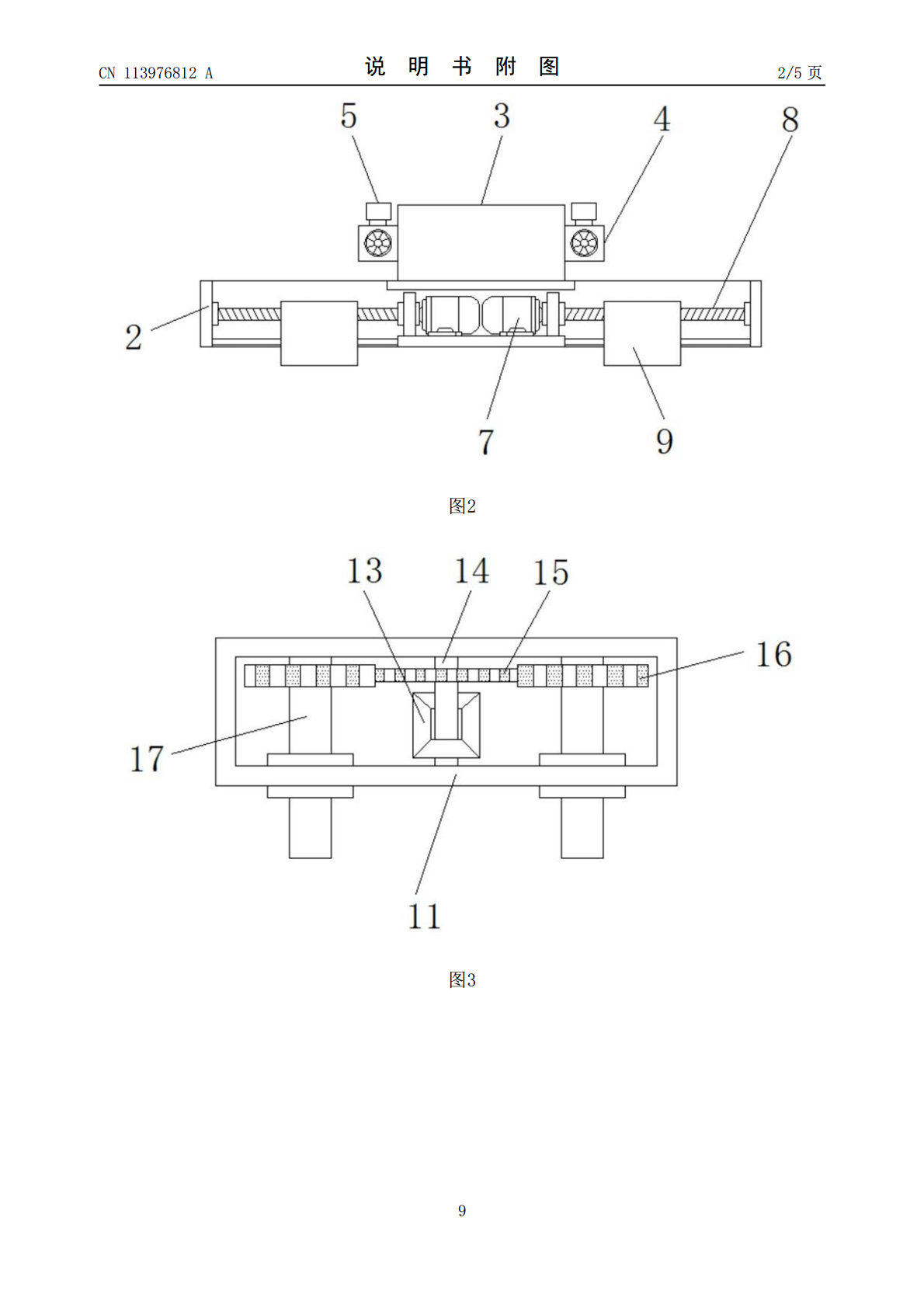
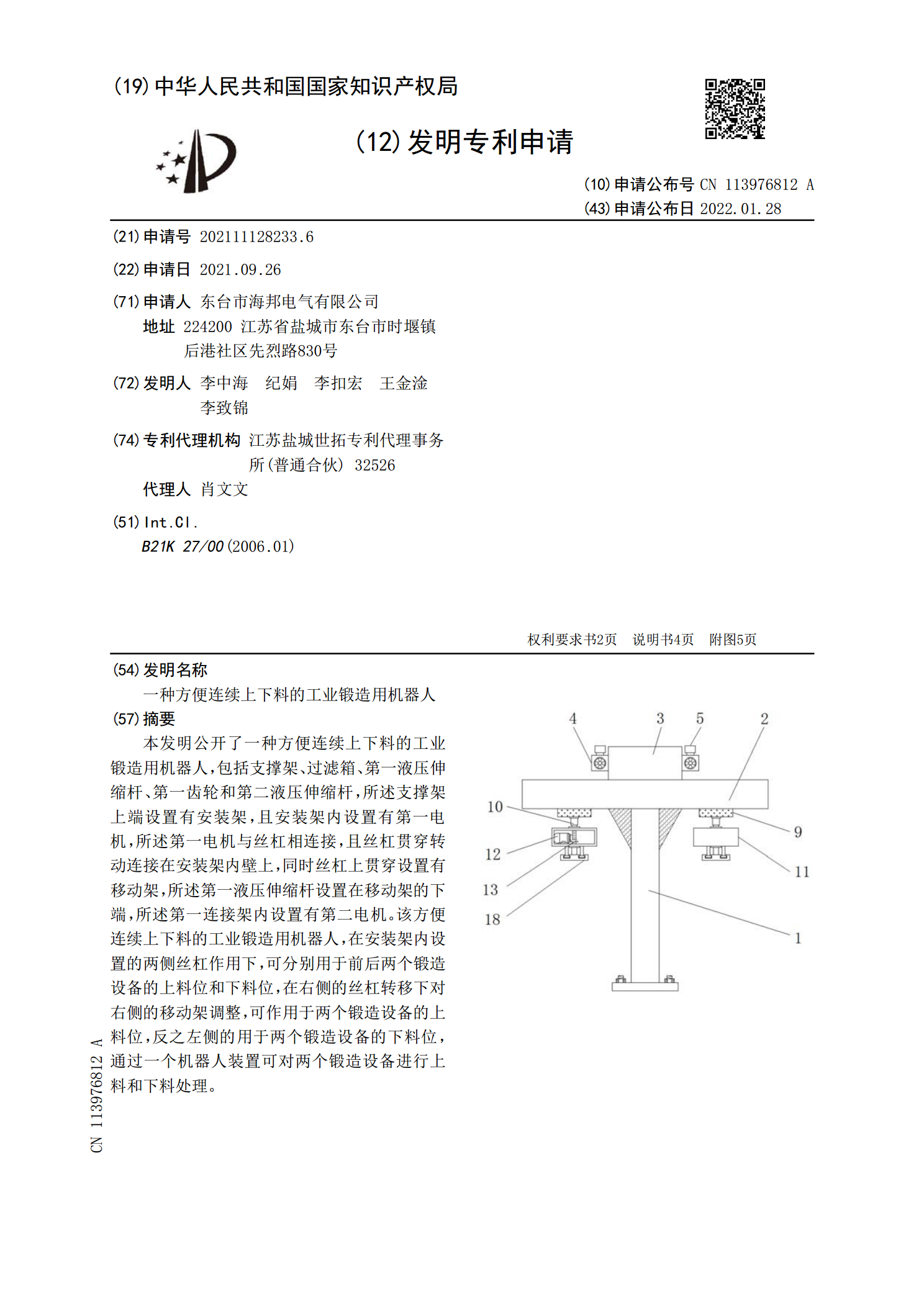
本发明公开了一种方便连续上下料的工业锻造用机器人,包括支撑架、过滤箱、第一液压伸缩杆、第一齿轮和第二液压伸缩杆,所述支撑架上端设置有安装架,且安装架内设置有第一电机,所述第一电机与丝杠相连接,且丝杠贯穿转动连接在安装架内壁上,同时丝杠上贯穿设置有移动架,所述第一液压伸缩杆设置在移动架的下端,所述第一连接架内设置有第二电机。该方便连续上下料的工业锻造用机器人,在安装架内设置的两侧丝杠作用下,可分别用于前后两个锻造设备的上料位和下料位,在右侧的丝杠转移下对右侧的移动架调整,可作用于两个锻造设备的上料位,反之左
一种工业锻造用物料出炉机器人.pdf
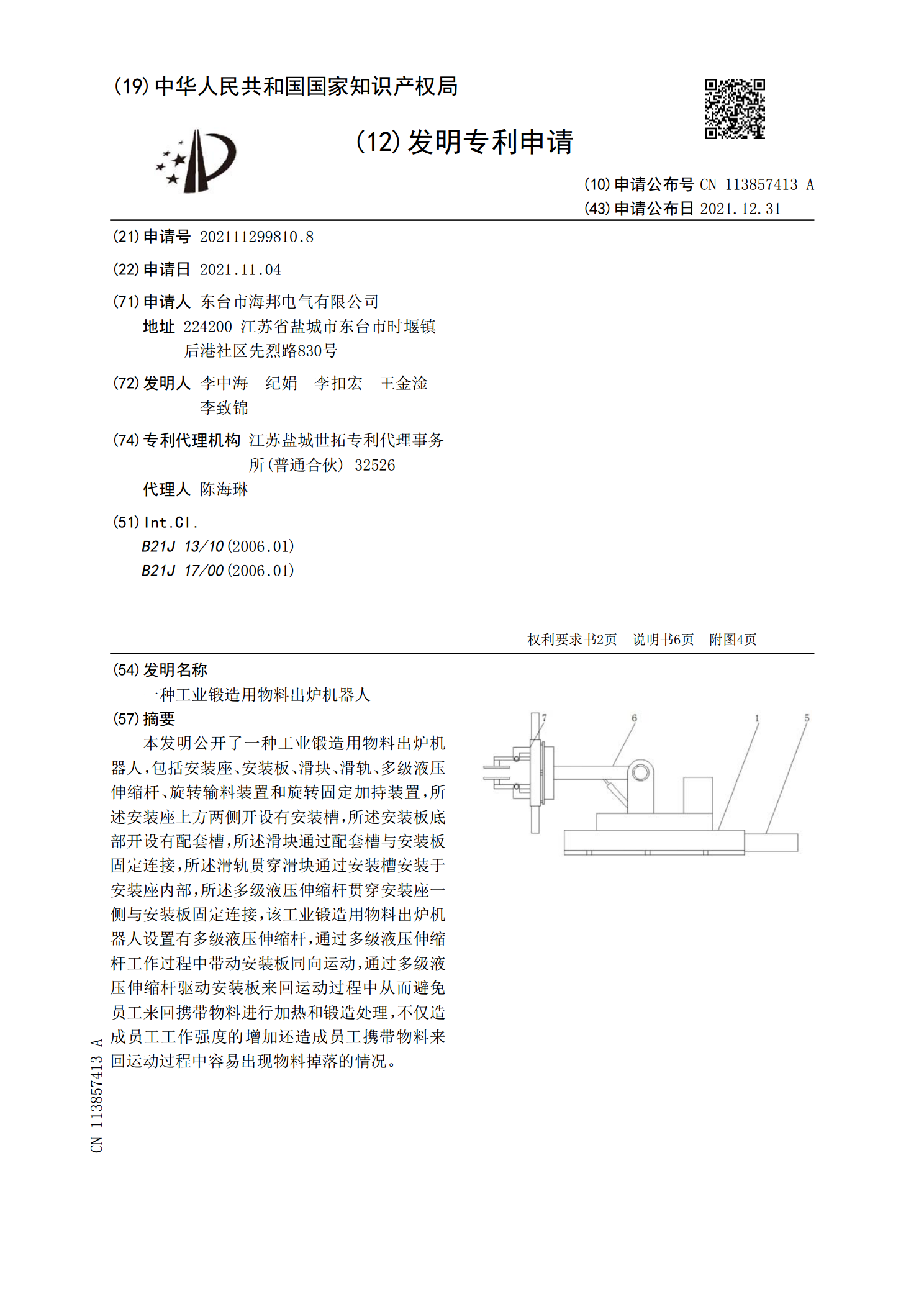
本发明公开了一种工业锻造用物料出炉机器人,包括安装座、安装板、滑块、滑轨、多级液压伸缩杆、旋转输料装置和旋转固定加持装置,所述安装座上方两侧开设有安装槽,所述安装板底部开设有配套槽,所述滑块通过配套槽与安装板固定连接,所述滑轨贯穿滑块通过安装槽安装于安装座内部,所述多级液压伸缩杆贯穿安装座一侧与安装板固定连接,该工业锻造用物料出炉机器人设置有多级液压伸缩杆,通过多级液压伸缩杆工作过程中带动安装板同向运动,通过多级液压伸缩杆驱动安装板来回运动过程中从而避免员工来回携带物料进行加热和锻造处理,不仅造成员工工作
铁水锻造上下料机器人.pdf
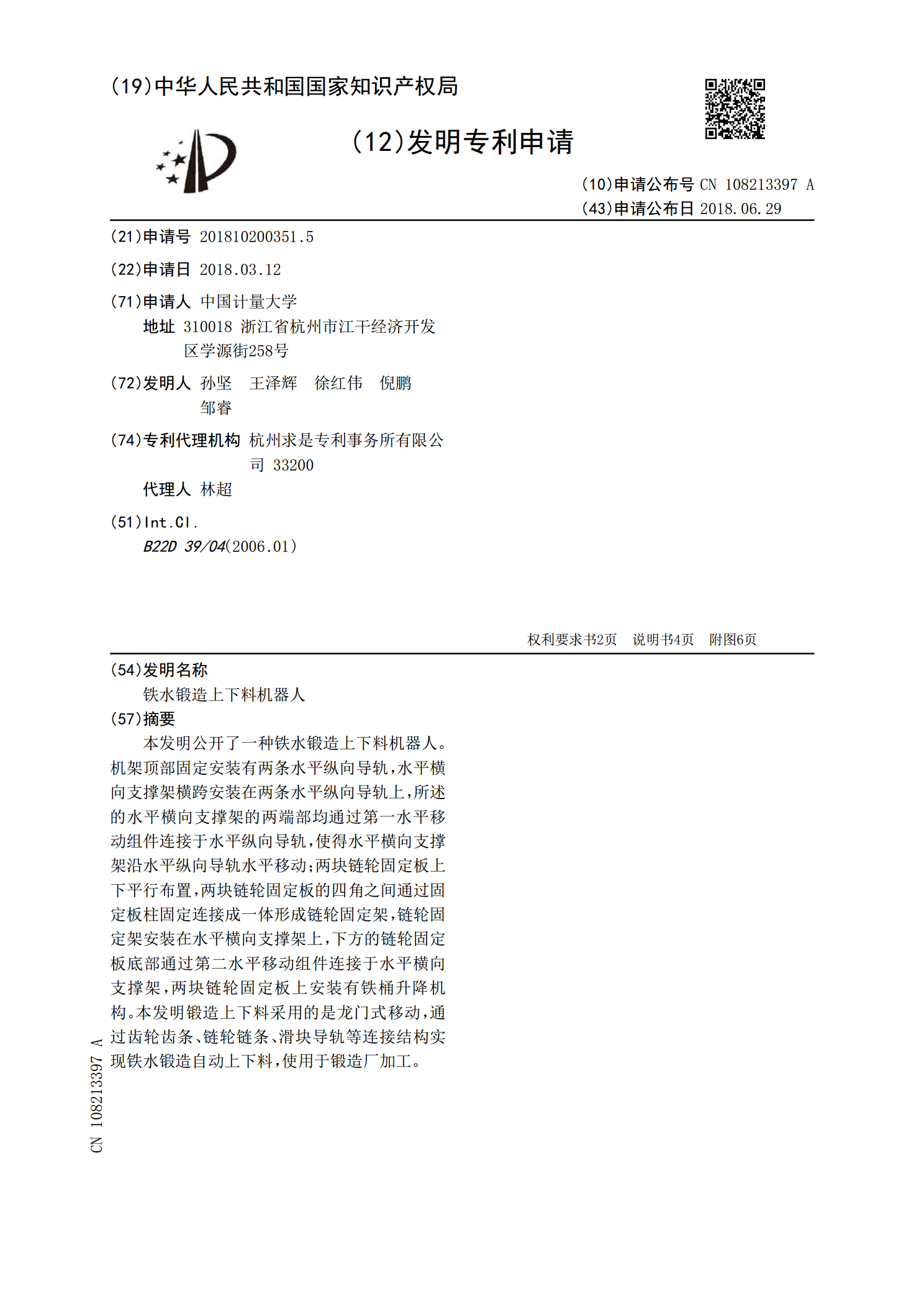
本发明公开了一种铁水锻造上下料机器人。机架顶部固定安装有两条水平纵向导轨,水平横向支撑架横跨安装在两条水平纵向导轨上,所述的水平横向支撑架的两端部均通过第一水平移动组件连接于水平纵向导轨,使得水平横向支撑架沿水平纵向导轨水平移动;两块链轮固定板上下平行布置,两块链轮固定板的四角之间通过固定板柱固定连接成一体形成链轮固定架,链轮固定架安装在水平横向支撑架上,下方的链轮固定板底部通过第二水平移动组件连接于水平横向支撑架,两块链轮固定板上安装有铁桶升降机构。本发明锻造上下料采用的是龙门式移动,通过齿轮齿条、链轮

一种上下料工业机器人.pdf
本发明提供一种上下料工业机器人,包括齿板、齿轮、连接轴、固定壳、双轴电机、夹板、支撑杆、活动杆以及转盘,外壳内部设置有齿轮,齿轮左右两侧均设置有齿板,齿轮内部设置有连接轴,连接轴左侧设置有双轴电机,外壳前侧设置有夹板,夹板下侧设置有固定壳,夹板内部左右两侧均设置有支撑杆,支撑杆下侧设置有活动杆,活动杆下侧设置有转盘,该设计解决了原有工业人工上下料安全系数低、工作效率低的问题,本发明结构合理,使用稳固,工作效率高。
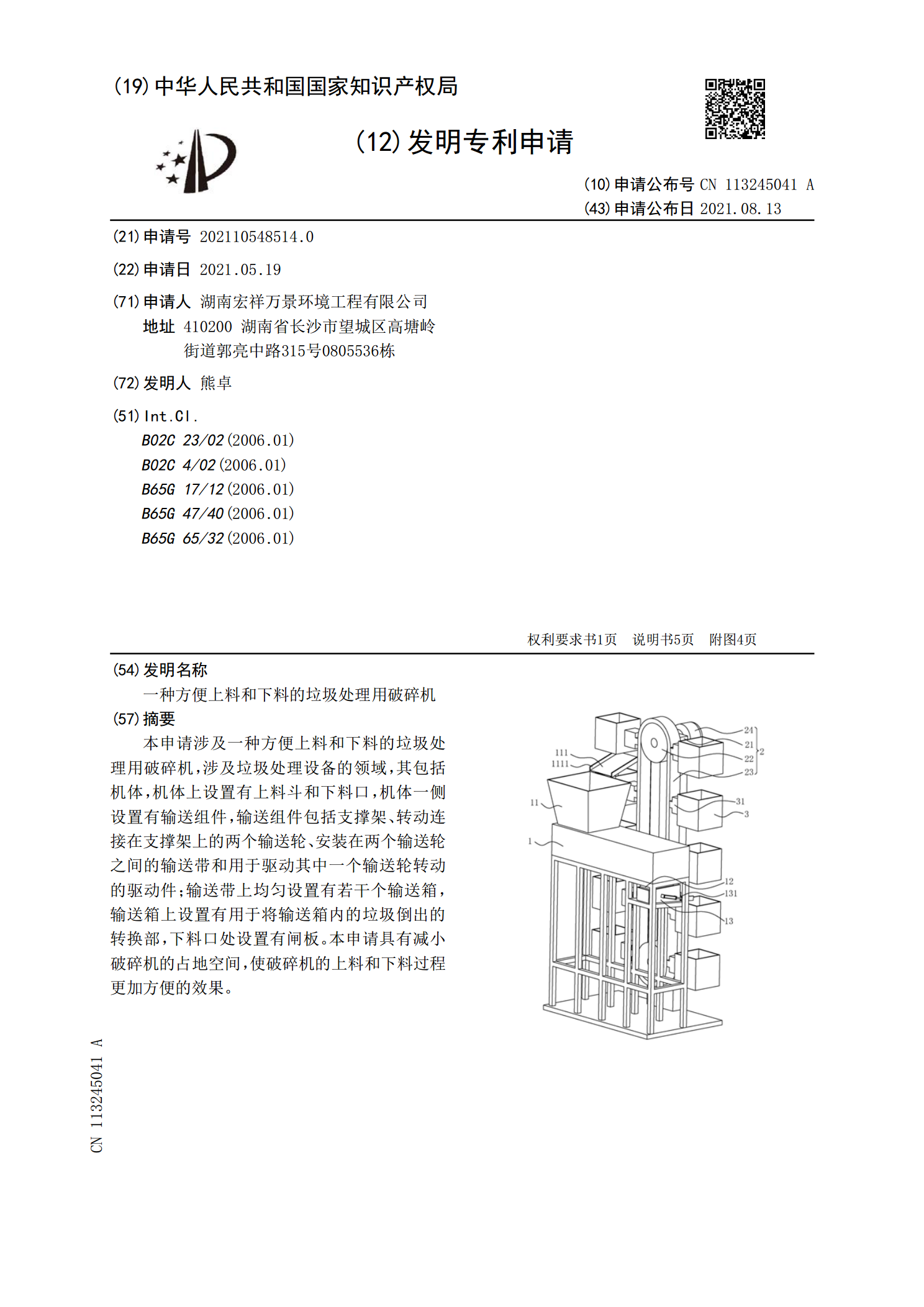
一种方便上料和下料的垃圾处理用破碎机.pdf
本申请涉及一种方便上料和下料的垃圾处理用破碎机,涉及垃圾处理设备的领域,其包括机体,机体上设置有上料斗和下料口,机体一侧设置有输送组件,输送组件包括支撑架、转动连接在支撑架上的两个输送轮、安装在两个输送轮之间的输送带和用于驱动其中一个输送轮转动的驱动件;输送带上均匀设置有若干个输送箱,输送箱上设置有用于将输送箱内的垃圾倒出的转换部,下料口处设置有闸板。本申请具有减小破碎机的占地空间,使破碎机的上料和下料过程更加方便的效果。