
一种新型钻机自动化排管系统.pdf

贤惠****66

1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种新型钻机自动化排管系统.pdf
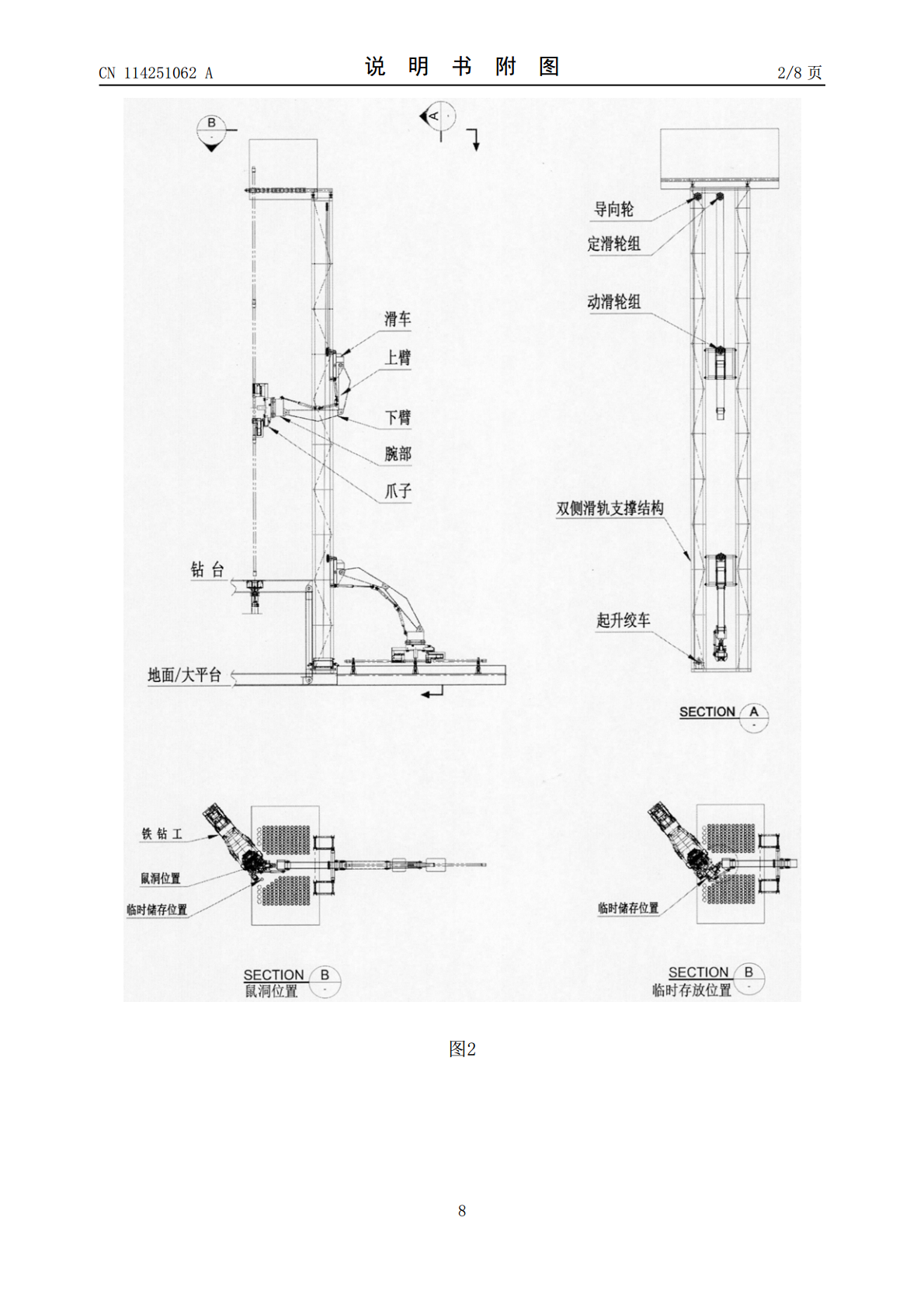
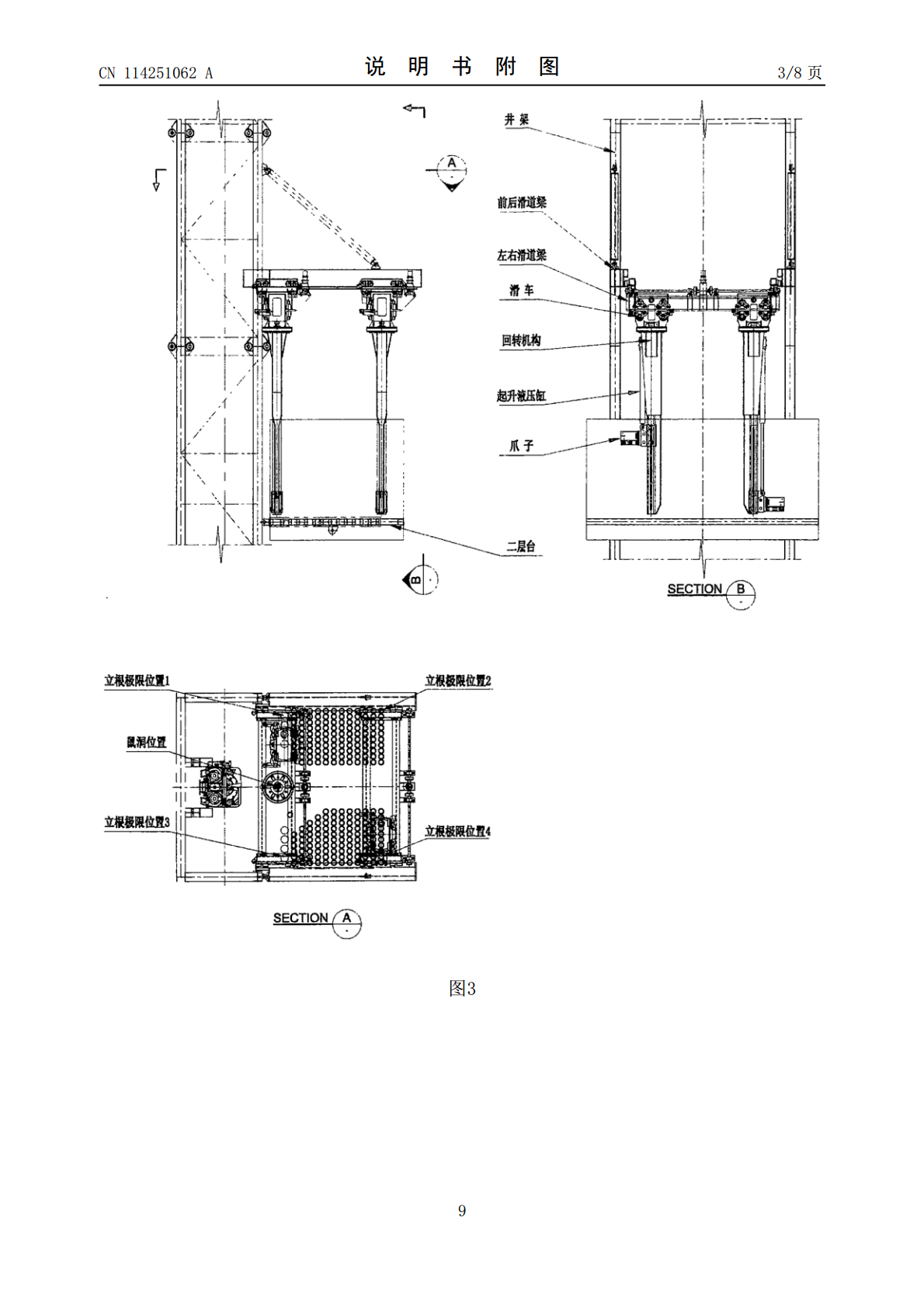
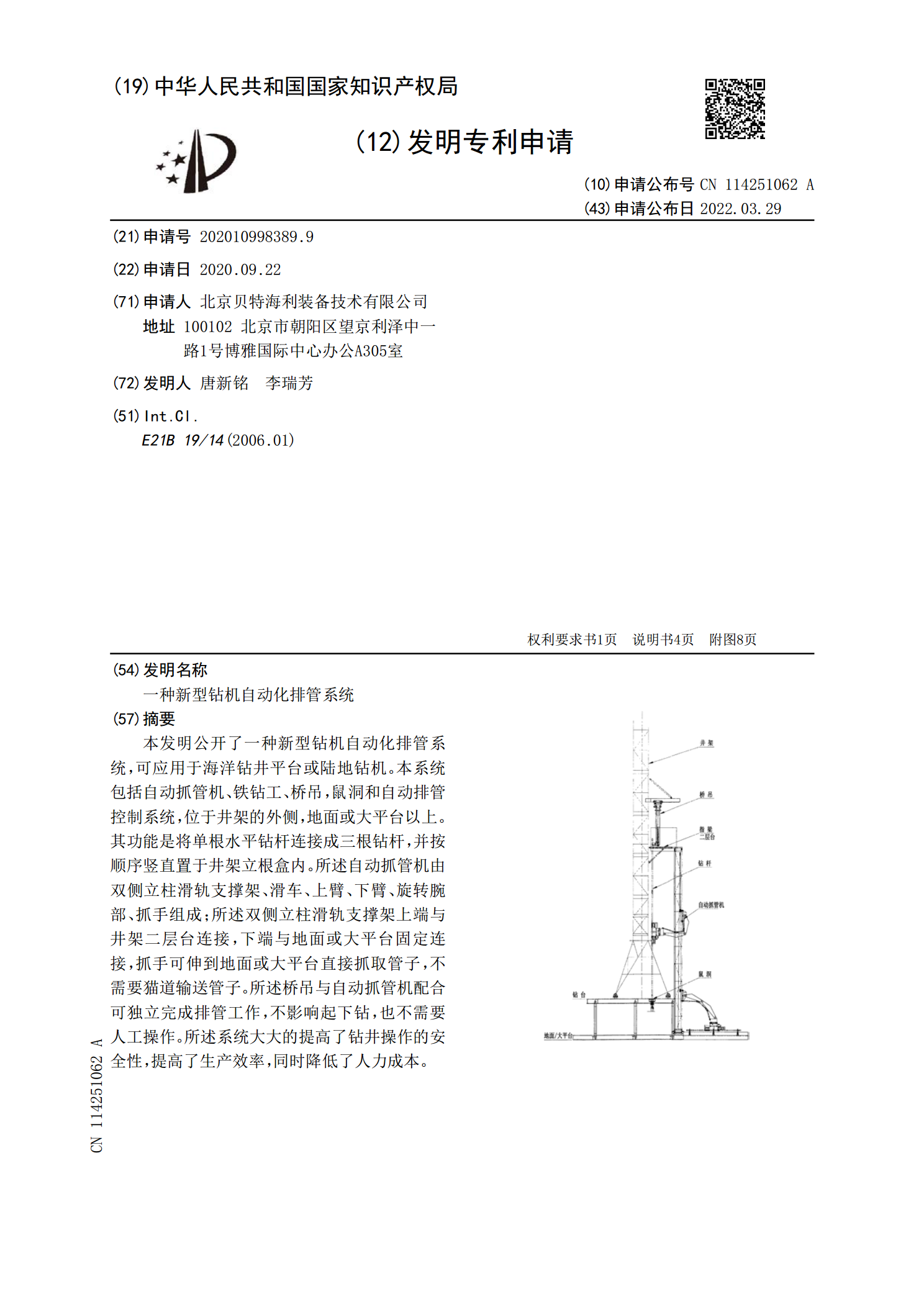
本发明公开了一种新型钻机自动化排管系统,可应用于海洋钻井平台或陆地钻机。本系统包括自动抓管机、铁钻工、桥吊,鼠洞和自动排管控制系统,位于井架的外侧,地面或大平台以上。其功能是将单根水平钻杆连接成三根钻杆,并按顺序竖直置于井架立根盒内。所述自动抓管机由双侧立柱滑轨支撑架、滑车、上臂、下臂、旋转腕部、抓手组成;所述双侧立柱滑轨支撑架上端与井架二层台连接,下端与地面或大平台固定连接,抓手可伸到地面或大平台直接抓取管子,不需要猫道输送管子。所述桥吊与自动抓管机配合可独立完成排管工作,不影响起下钻,也不需要人工操作
一种垂直排管机构的自动化钻机.pdf
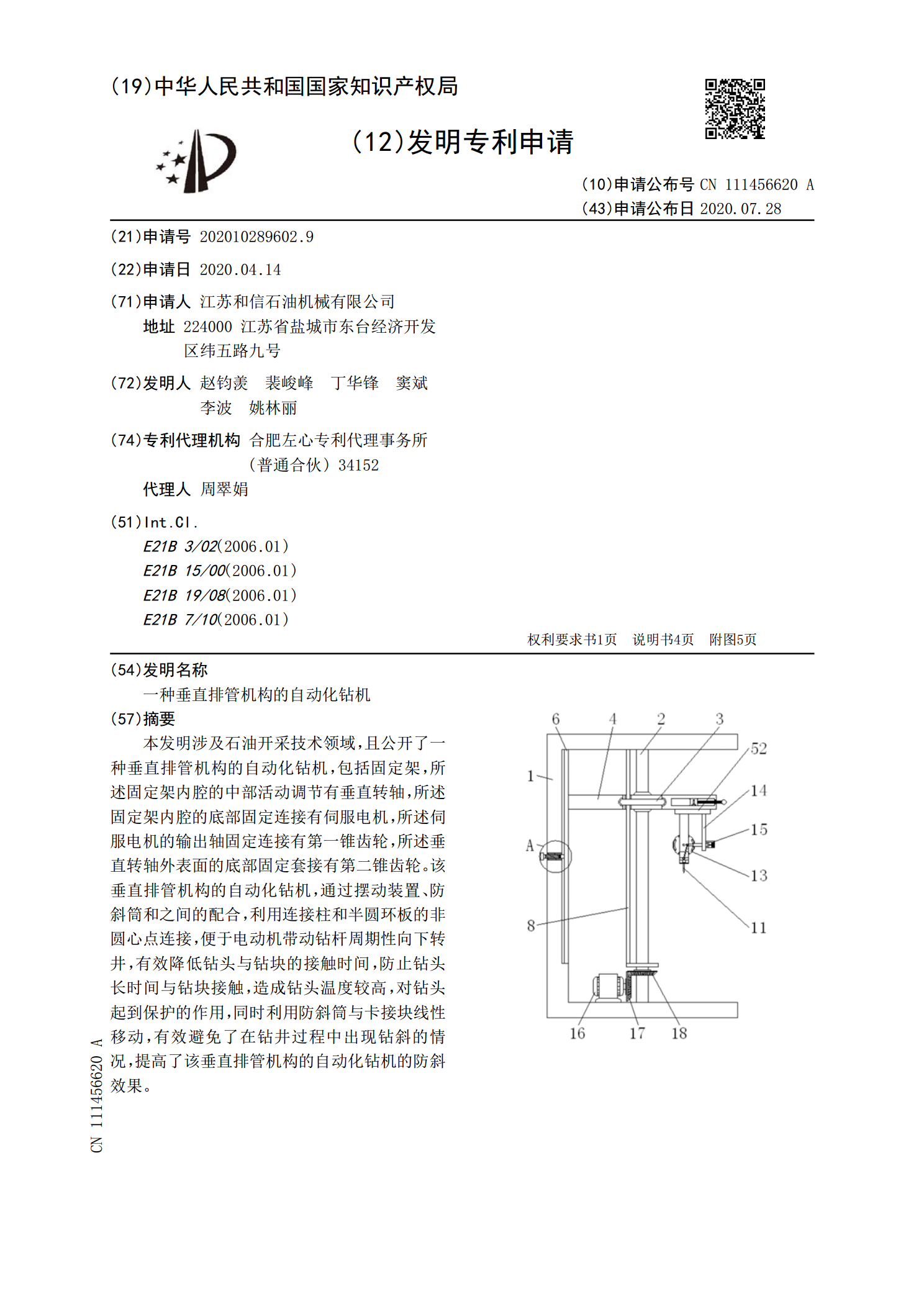
本发明涉及石油开采技术领域,且公开了一种垂直排管机构的自动化钻机,包括固定架,所述固定架内腔的中部活动调节有垂直转轴,所述固定架内腔的底部固定连接有伺服电机,所述伺服电机的输出轴固定连接有第一锥齿轮,所述垂直转轴外表面的底部固定套接有第二锥齿轮。该垂直排管机构的自动化钻机,通过摆动装置、防斜筒和之间的配合,利用连接柱和半圆环板的非圆心点连接,便于电动机带动钻杆周期性向下转井,有效降低钻头与钻块的接触时间,防止钻头长时间与钻块接触,造成钻头温度较高,对钻头起到保护的作用,同时利用防斜筒与卡接块线性移动,有效
半自动化送排钻杆的排管系统.pdf
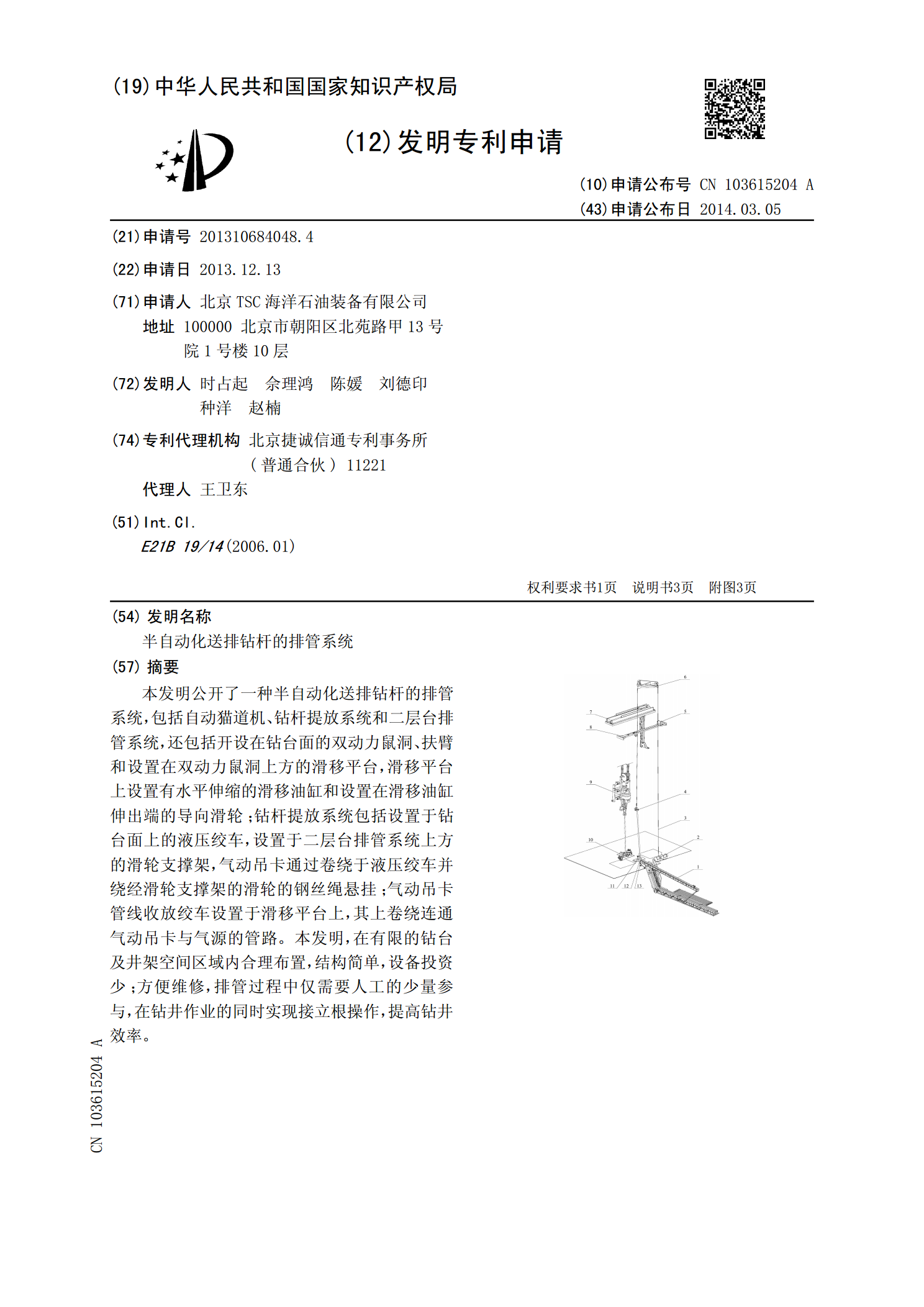
本发明公开了一种半自动化送排钻杆的排管系统,包括自动猫道机、钻杆提放系统和二层台排管系统,还包括开设在钻台面的双动力鼠洞、扶臂和设置在双动力鼠洞上方的滑移平台,滑移平台上设置有水平伸缩的滑移油缸和设置在滑移油缸伸出端的导向滑轮;钻杆提放系统包括设置于钻台面上的液压绞车,设置于二层台排管系统上方的滑轮支撑架,气动吊卡通过卷绕于液压绞车并绕经滑轮支撑架的滑轮的钢丝绳悬挂;气动吊卡管线收放绞车设置于滑移平台上,其上卷绕连通气动吊卡与气源的管路。本发明,在有限的钻台及井架空间区域内合理布置,结构简单,设备投资少;

一种新型海底连续管钻机及钻井方法.pdf
本发明公开了钻井装备领域中一种新型海底连续管钻机及钻井方法。包含控制基站、管缆系统、集中阀座、固控系统、集成平台、连续管系统、动力钻具和井口装置。控制基站位于驳船,通过管缆系统为海底模块提供动力和信号;集中阀座向各执行和控制机构分线;固控系统位于海底,钻井液不需驳船储存和脐带缆输送;钻井液在海底净化,不需返至驳船;集成平台有气控浮沉、定向潜航和海底紧固功能,平台移动不受海床软泥层限制;连续管系统由注入头驱动连续管一趟钻直达目标地层,不需下套管、换钻头,钻深不受套管容量限制;动力钻具含钻头、永磁电机和锁定装
国外几种典型的新型自动化钻机.pdf
石油机械—87—CHINAPETROLEUMMACHINERY2005年第33卷第11期!国外石油机械#国外几种典型的新型自动化钻机唐丽华1王洪英2(11大庆力神泵业公司21大庆石油管理局钻井工程技术研究院)摘要自动化石油钻机具有很高的适应性、经济性、可靠性和先进性。特别是在环境条件和地质构造相当恶劣以及钻井费用相当高的地区钻井,具有更好的适应性和经济性。介绍了几种国外的新兴自动化钻机,为引进或研制自动化钻机提供参考。关键词自动化钻机钻杆排放自动控制国际钻井市场竞争激烈,国际知名的钻井承包(4)动力模块由