
异型螺母拆卸机械手.pdf

书生****文章

1/8
2/8

3/8
4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

异型螺母拆卸机械手.pdf
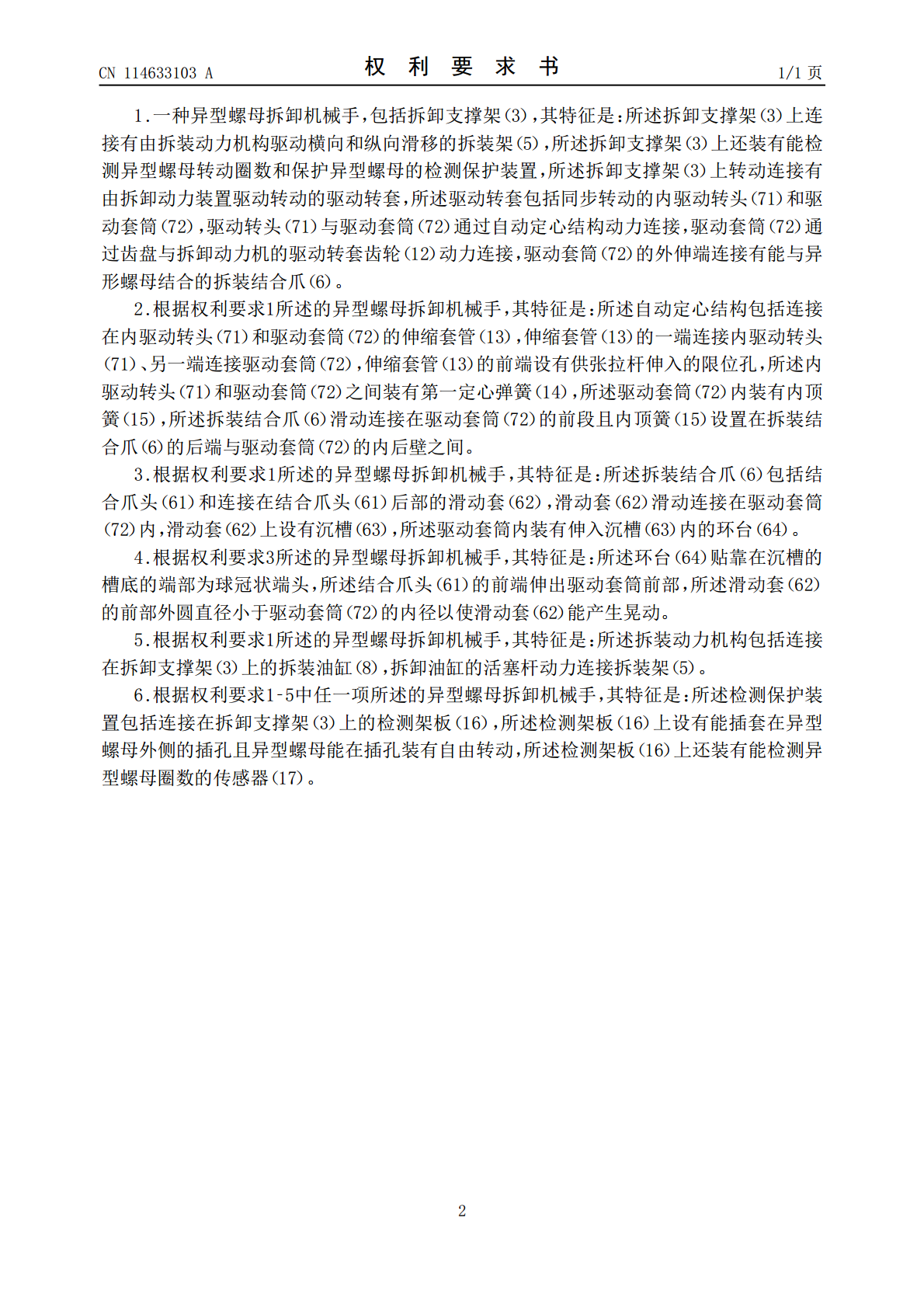
本发明公开了一种异型螺母拆卸机械手,其包括拆卸支撑架,所述拆卸支撑架上连接有由拆装动力机构驱动横向和纵向滑移的拆装架,所述拆卸支撑架上还装有能检测异型螺母转动圈数和保护异型螺母的检测保护装置,所述拆卸支撑架上转动连接有由拆卸动力装置驱动转动的驱动转套,所述驱动转套包括同步转动的内驱动转头和驱动套筒,驱动转头与驱动套筒通过自动定心结构动力连接,驱动套筒通过齿盘与拆卸动力机的驱动转套齿轮动力连接,驱动套筒的外伸端连接有能与异形螺母结合的拆装结合爪。本发明能快速且准确夹持异型螺母,具有有效保证轨道板生产质量和提

一种异型螺母旋拧机械手.pdf
本发明公开了一种异型螺母旋拧机械手,其包括相对设置的两拆卸支撑架,拆卸支撑架上连接有能顶靠在模具板上的顶靠杆,两相对的拆卸支撑架上对应装有由拆装动力机构驱动的拆装架,拆装架的内端设有拆装结合爪,拆卸支撑架上还装有能检测异型螺母转动圈数和保护异型螺母的检测保护装置,所述拆卸支撑架上转动连接有由旋拧动力装置驱动转动的驱动转套,驱动转套包括能套装在张拉杆上的驱动转头和驱动套筒,驱动转头与驱动套筒通过自动定心结构动力连接,驱动套筒通过花键与驱动转套齿轮动力连接,驱动套筒与拆卸支撑架之间装有驱动顶簧。本发明能快速且
防拆卸式接管螺母、接管螺母组件、空调器及接管螺母防拆卸的方法.pdf
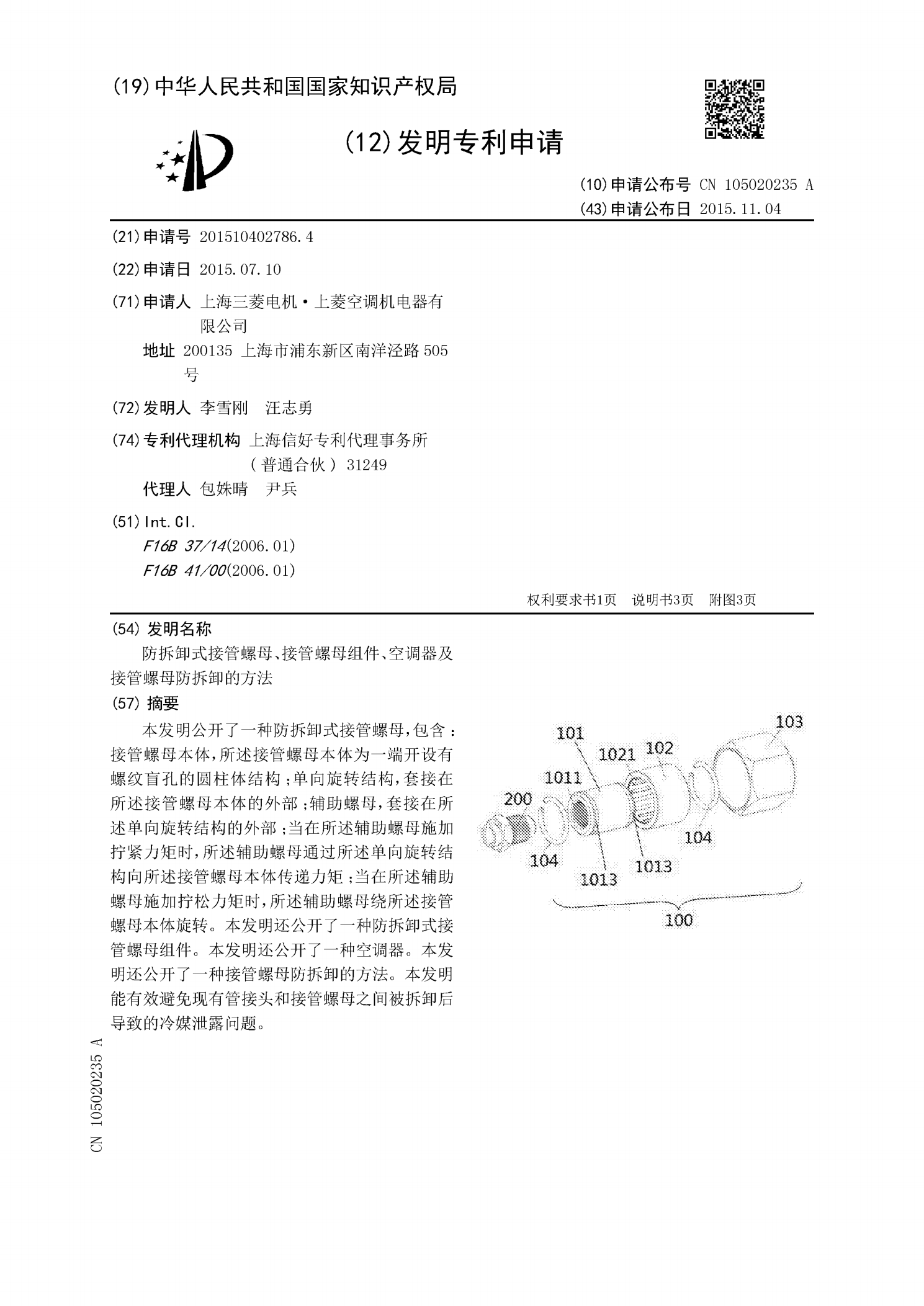
本发明公开了一种防拆卸式接管螺母,包含:接管螺母本体,所述接管螺母本体为一端开设有螺纹盲孔的圆柱体结构;单向旋转结构,套接在所述接管螺母本体的外部;辅助螺母,套接在所述单向旋转结构的外部;当在所述辅助螺母施加拧紧力矩时,所述辅助螺母通过所述单向旋转结构向所述接管螺母本体传递力矩;当在所述辅助螺母施加拧松力矩时,所述辅助螺母绕所述接管螺母本体旋转。本发明还公开了一种防拆卸式接管螺母组件。本发明还公开了一种空调器。本发明还公开了一种接管螺母防拆卸的方法。本发明能有效避免现有管接头和接管螺母之间被拆卸后导致的冷
防拆卸式接管螺母、接管螺母组件、空调器及接管螺母防拆卸的方法.pdf
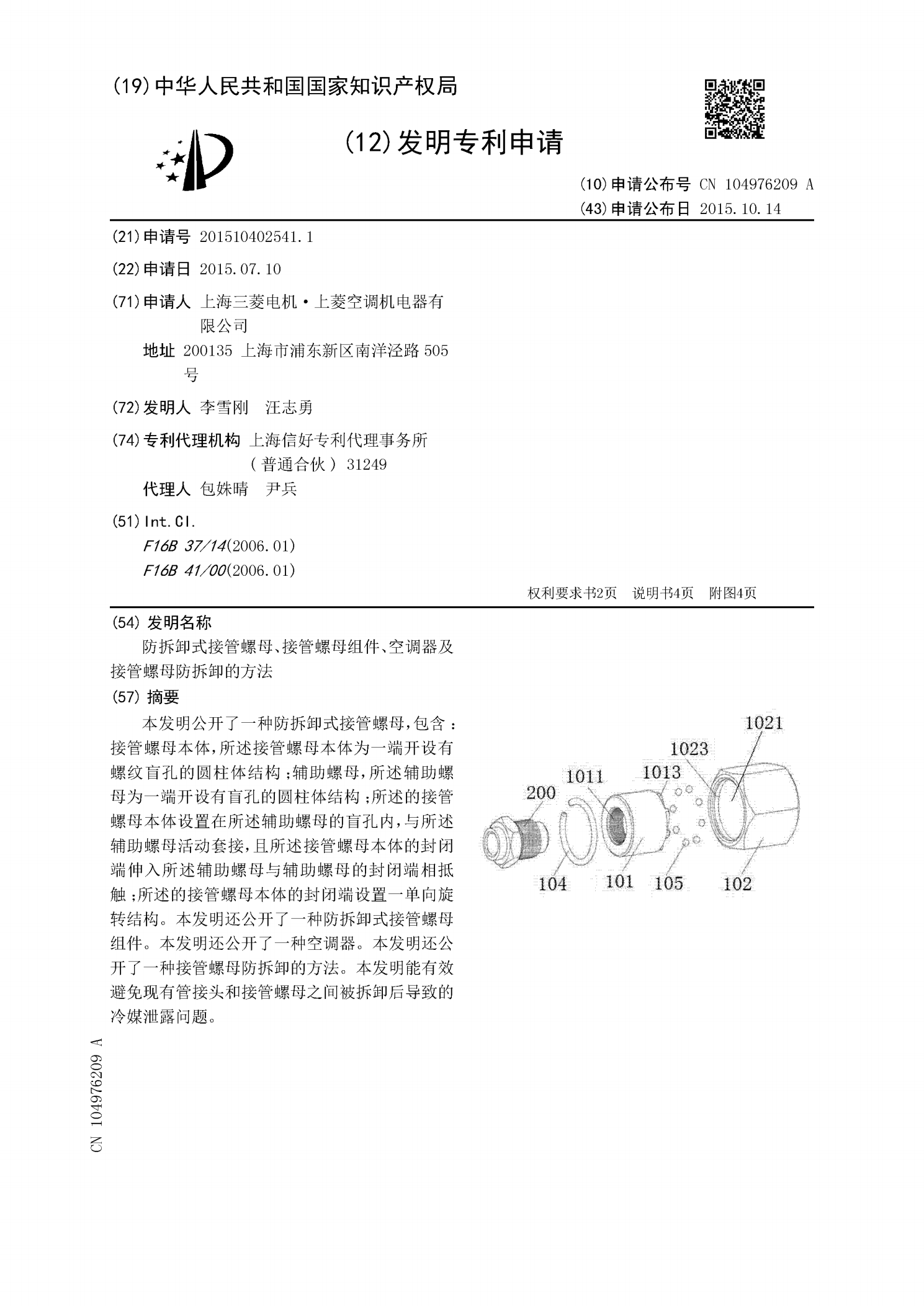
本发明公开了一种防拆卸式接管螺母,包含:接管螺母本体,所述接管螺母本体为一端开设有螺纹盲孔的圆柱体结构;辅助螺母,所述辅助螺母为一端开设有盲孔的圆柱体结构;所述的接管螺母本体设置在所述辅助螺母的盲孔内,与所述辅助螺母活动套接,且所述接管螺母本体的封闭端伸入所述辅助螺母与辅助螺母的封闭端相抵触;所述的接管螺母本体的封闭端设置一单向旋转结构。本发明还公开了一种防拆卸式接管螺母组件。本发明还公开了一种空调器。本发明还公开了一种接管螺母防拆卸的方法。本发明能有效避免现有管接头和接管螺母之间被拆卸后导致的冷媒泄露问
一种异型螺栓螺母组件.pdf
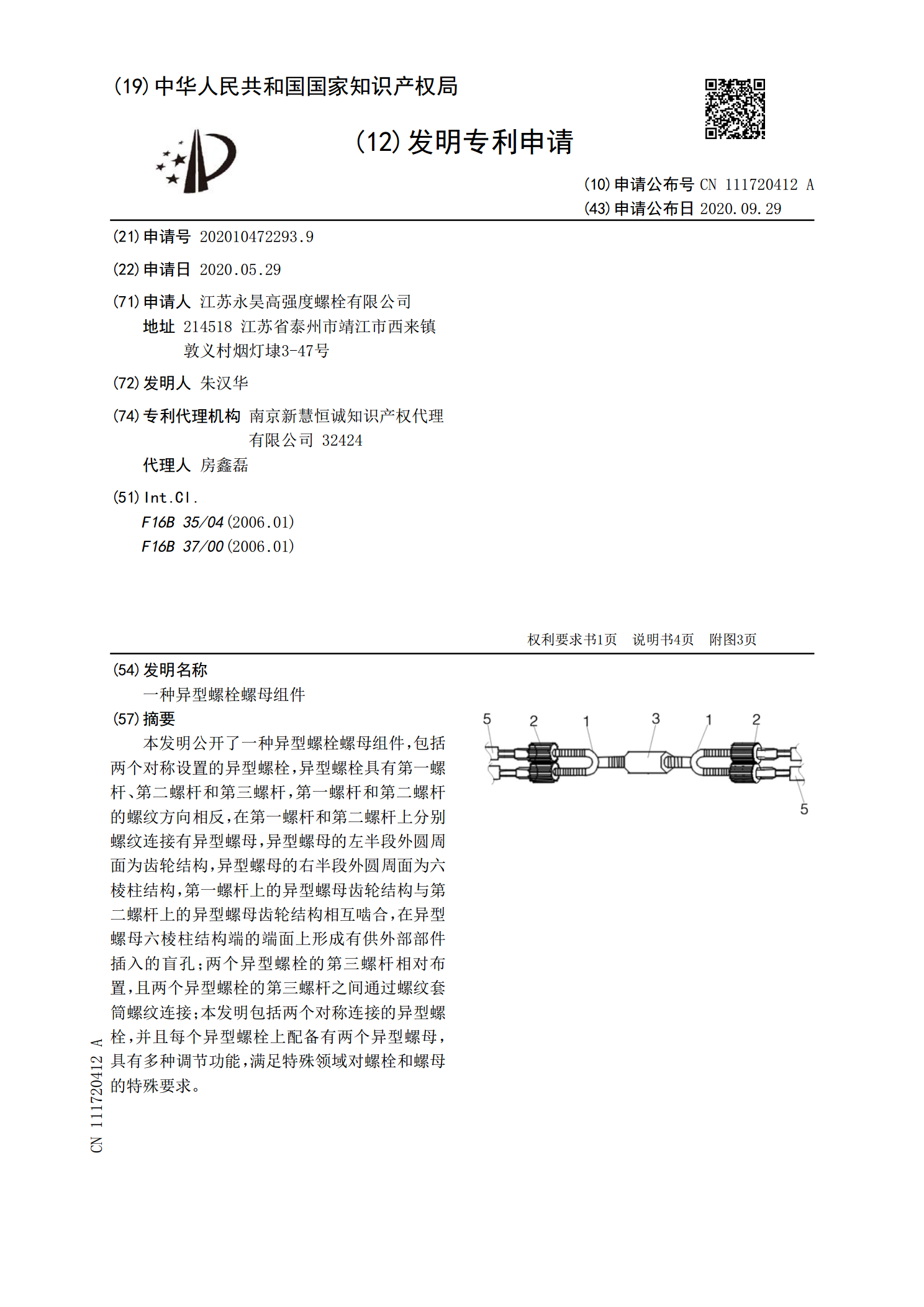
本发明公开了一种异型螺栓螺母组件,包括两个对称设置的异型螺栓,异型螺栓具有第一螺杆、第二螺杆和第三螺杆,第一螺杆和第二螺杆的螺纹方向相反,在第一螺杆和第二螺杆上分别螺纹连接有异型螺母,异型螺母的左半段外圆周面为齿轮结构,异型螺母的右半段外圆周面为六棱柱结构,第一螺杆上的异型螺母齿轮结构与第二螺杆上的异型螺母齿轮结构相互啮合,在异型螺母六棱柱结构端的端面上形成有供外部部件插入的盲孔;两个异型螺栓的第三螺杆相对布置,且两个异型螺栓的第三螺杆之间通过螺纹套筒螺纹连接;本发明包括两个对称连接的异型螺栓,并且每个异