
一种基于视觉的物流运载小车.pdf

努力****绮亦


1/10
2/10
3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于视觉的物流运载小车.pdf
本发明公开了一种基于视觉的物流运载小车,涉及机械运输技术领域。该物流运输小车包括:车体支撑架、运输机构、抓取机构、移动机构和控制模块,所述运输机构通过螺栓与车体支撑架连接,位于车体支撑架的上端;所述抓取机构与运输机构通过螺栓连接,所述移动机构设置于车体支撑架的下端,所述控制模块设置于车体支撑架的底部,所述运输机构、抓取机构、移动机构均与控制模块连接。本发明物流运载小车可准确地实现物品的抓取和运输,并能按照物体类别分类堆码,具有自动化程度高、结构简单、操作便捷的特点。
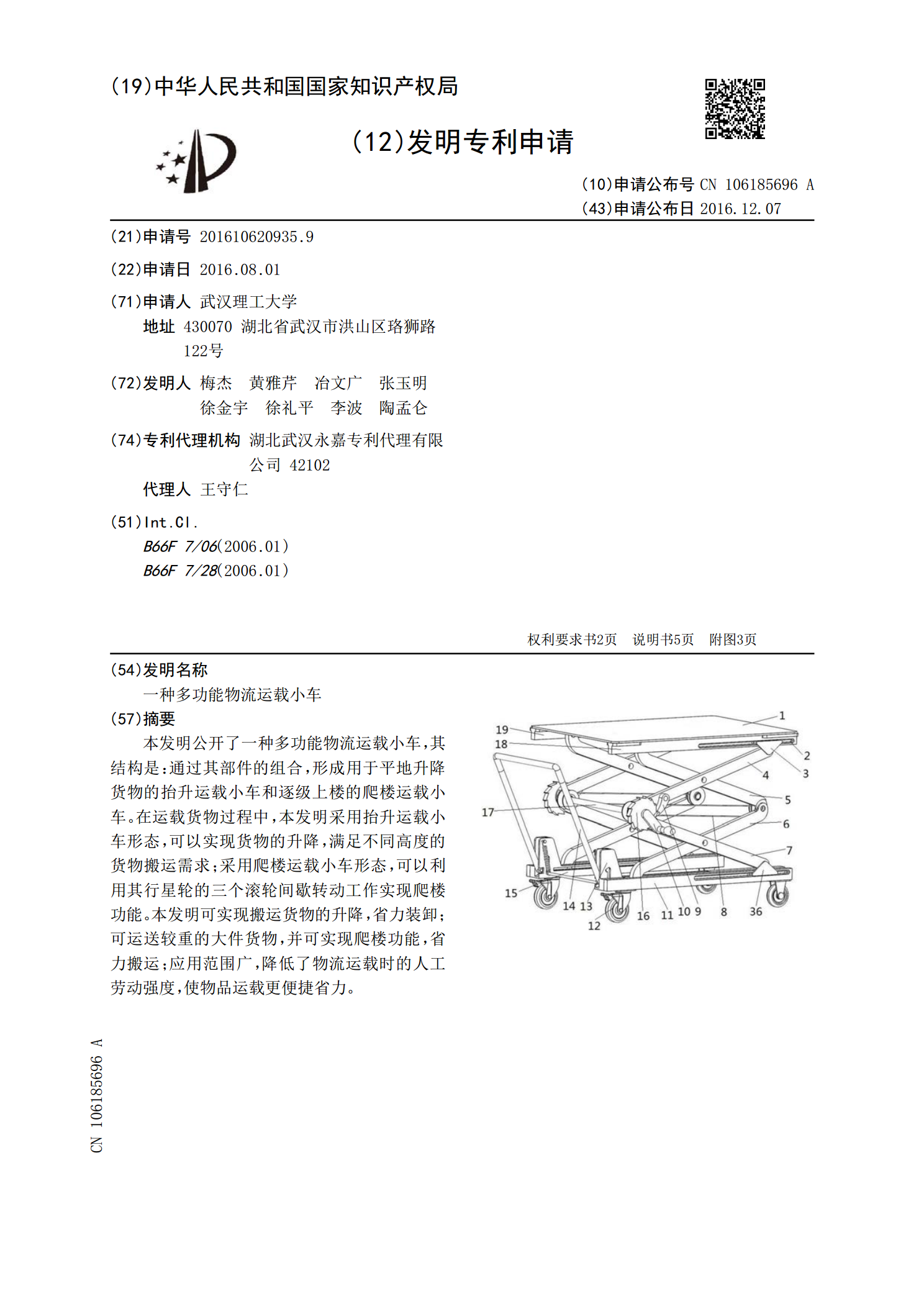
一种多功能物流运载小车.pdf
本发明公开了一种多功能物流运载小车,其结构是:通过其部件的组合,形成用于平地升降货物的抬升运载小车和逐级上楼的爬楼运载小车。在运载货物过程中,本发明采用抬升运载小车形态,可以实现货物的升降,满足不同高度的货物搬运需求;采用爬楼运载小车形态,可以利用其行星轮的三个滚轮间歇转动工作实现爬楼功能。本发明可实现搬运货物的升降,省力装卸;可运送较重的大件货物,并可实现爬楼功能,省力搬运;应用范围广,降低了物流运载时的人工劳动强度,使物品运载更便捷省力。

一种运载小车.pdf
本发明公开了一种运载小车,包括十字型承载板和四个滚轮,所述四个滚轮分别安装在承载板四个端部的下侧。本发明的运载小车,结构简单、使用方便,为工厂内部的小件装置和产品的运输提供了便捷工具。

一种新型货物运载小车.pdf
本发明创造提供了一种新型货物运载小车,包括车体、主架体、连接轴、手柄和车轮;所述车体包括第一轴杆和第二轴杆;所述第一轴杆一端固定有手柄,另一端与车轮连接;所述第二轴杆与第一轴杆结构相同;所述主架体包括置物架和支撑架,所述支撑架为三角形架体,所述置物架底部固定有支撑架;所述第一轴杆和第二轴杆交叉设置,且通过连接轴连接;所述连接轴固定在置物架底部。本发明创造具有以下优势:本发明所述的双车体轴杆且通过连接轴连接的结构设计,可以实现轴杆的开合,即可达到原始独轮车的作用效果,也可以实现双轮稳定运输的设计效果,结构巧

一种车间运载小车.pdf
本发明公开一种车间运载小车,包括轨道和可沿轨道移动的小车,轨道为可移动轨道,包括轨道主体、升降装置和滑轮装置,轨道主体包括底座和平行设置于底座上的两轨道,升降装置和滑轮装置设置于底座的底部;滑轮装置与底座转动连接,以转动至支撑位置用于在地面和底座之间形成支撑,或转动至收拢位置以离开地面;小车包括小车主体和动力组件,小车主体顶部形成有用于放置运载货物的空间,动力组件用于驱动所述小车主体沿轨道移动。升降装置顶升轨道主体离开地面至合适高度,滑轮装置转动至支撑位置,升降装置收缩,滑轮装置支撑轨道主体移动至所需车间