
一种轻量化可折展空间桁架式抓捕机械手.pdf

论文****酱吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轻量化可折展空间桁架式抓捕机械手.pdf
本发明提供了一种轻量化可折展空间桁架式抓捕机械手,包括基座和机械手爪,机械手爪包括多个依次相连的折展单元;每一折展单元均包括上下设置的两个T形桁架,T形桁架包括一根支撑杆和一根连接杆,同一折展单元的两根支撑杆之间相互平行,且两根支撑杆之间通过剪叉式抓捕机构连接;同一折展单元的两根连接杆位于相同的平面内,且两根连接杆之间通过驱动支链连接;抓捕机构包括两根相同的伸缩剪叉杆、两根相同的翻转剪叉杆,两根伸缩剪叉杆的中部相互铰接,形成剪叉机构;驱动支链为直线伸缩式驱动支链。本发明结构简单、重量轻,并可以通过拆除和增

一种可折展机械手掌.pdf
一种可折展机械手掌,它涉及一种机械手掌。本发明解决了现有的机器人手爪由于受到手爪结构和电气系统方面的制约,机器人手掌存在缺乏灵活调整能力的问题。第一小手掌板、第二小手掌板、第一大手掌板和第二大手掌板两两相对构成完整的机械手掌板,手掌连杆机构与每块手掌板的杆形凸台活动连接,第一涡轮轴的一端上固套有第一涡轮,第二涡轮轴的一端上固套有第二涡轮,双轴电机通过固定卡座固定在固定圆柱的上端,第一丝杠和第二丝杠对称安装在双轴电机的输出轴上,第一丝杆套筒与第一丝杠螺纹连接,第二丝杠套筒与第二丝杠螺纹连接,第一丝杆套筒与手

一种基于约束螺旋的可折展抓捕变胞机构.pdf
本发明提供了一种基于约束螺旋的可折展抓捕变胞机构,包括多个相同的变胞单元,变胞单元包括:抓捕机构,包括两根剪叉杆、两根连杆,两根剪叉杆通过转动副R1互相连接,形成剪叉机构;两根连杆的底端分别通过转动副R2、转动副R3连接于两根剪叉杆的顶端;转动分支机构包括依次转动连接的第一转动杆、第二转动杆、第三转动杆、第四转动杆、第五转动杆;第五转动杆通过转动副R4连接于连杆的顶端,第一转动杆通过转动副R5连接于剪叉杆的底端;两个转动分支机构通过铰链机构互相连接,本发明通过对控制多余的自由度,并保留折展、抓捕两个自由度
空间抓取机械手折展单元、折展机构及其折展方法.pdf
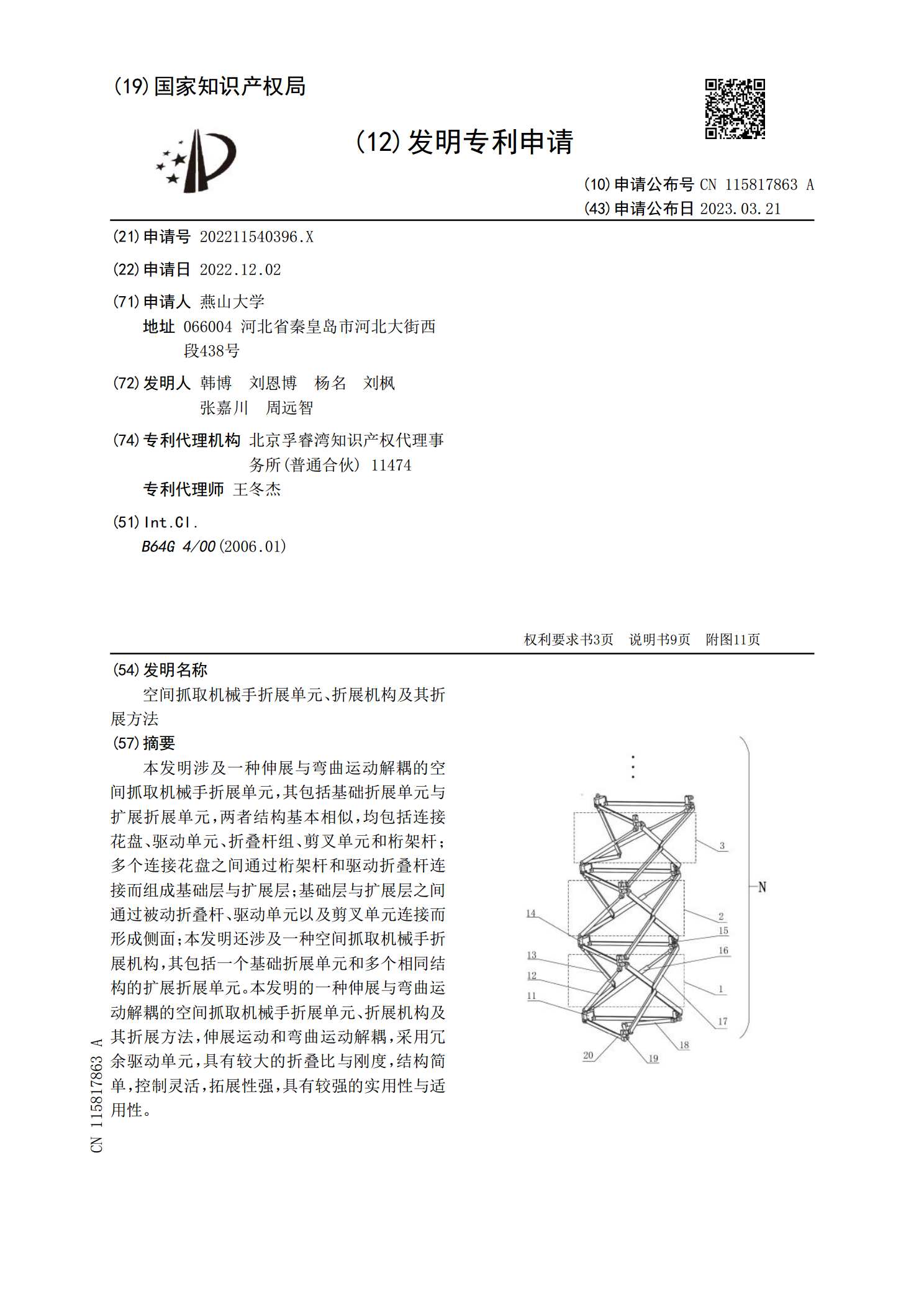
本发明涉及一种伸展与弯曲运动解耦的空间抓取机械手折展单元,其包括基础折展单元与扩展折展单元,两者结构基本相似,均包括连接花盘、驱动单元、折叠杆组、剪叉单元和桁架杆;多个连接花盘之间通过桁架杆和驱动折叠杆连接而组成基础层与扩展层;基础层与扩展层之间通过被动折叠杆、驱动单元以及剪叉单元连接而形成侧面;本发明还涉及一种空间抓取机械手折展机构,其包括一个基础折展单元和多个相同结构的扩展折展单元。本发明的一种伸展与弯曲运动解耦的空间抓取机械手折展单元、折展机构及其折展方法,伸展运动和弯曲运动解耦,采用冗余驱动单元,

组合可折展悬架式六轮车载机构.pdf
组合可折展悬架式六轮车载机构,它涉及一种可折展六轮车载机构。本发明解决目前探测车不能同时具有良好折叠功能和优越的移动性能的问题。第二杆、第六杆、第七杆和第三杆构成封闭长方形,第四杆的一端与第六杆的中部铰接,第四杆的另一端与第三杆的中部铰接,第二杆和第四杆平行设置,第七杆的一端通过第二转动锁定装置与第九杆的一端铰接,第九杆的另一端与第二车轮铰接,第四杆的侧壁与导轨的一端固接,导轨与滑块通过锁定销锁定,滑块的侧壁与第十杆的侧壁固接,第十杆、第十一杆、第十二杆、第十三杆和拉伸弹簧构成弹簧约束四边形机构。本发明用