
普外科手术用肌肉牵开装置.pdf

邻家****曼玉

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
普外科手术用肌肉牵开装置.pdf
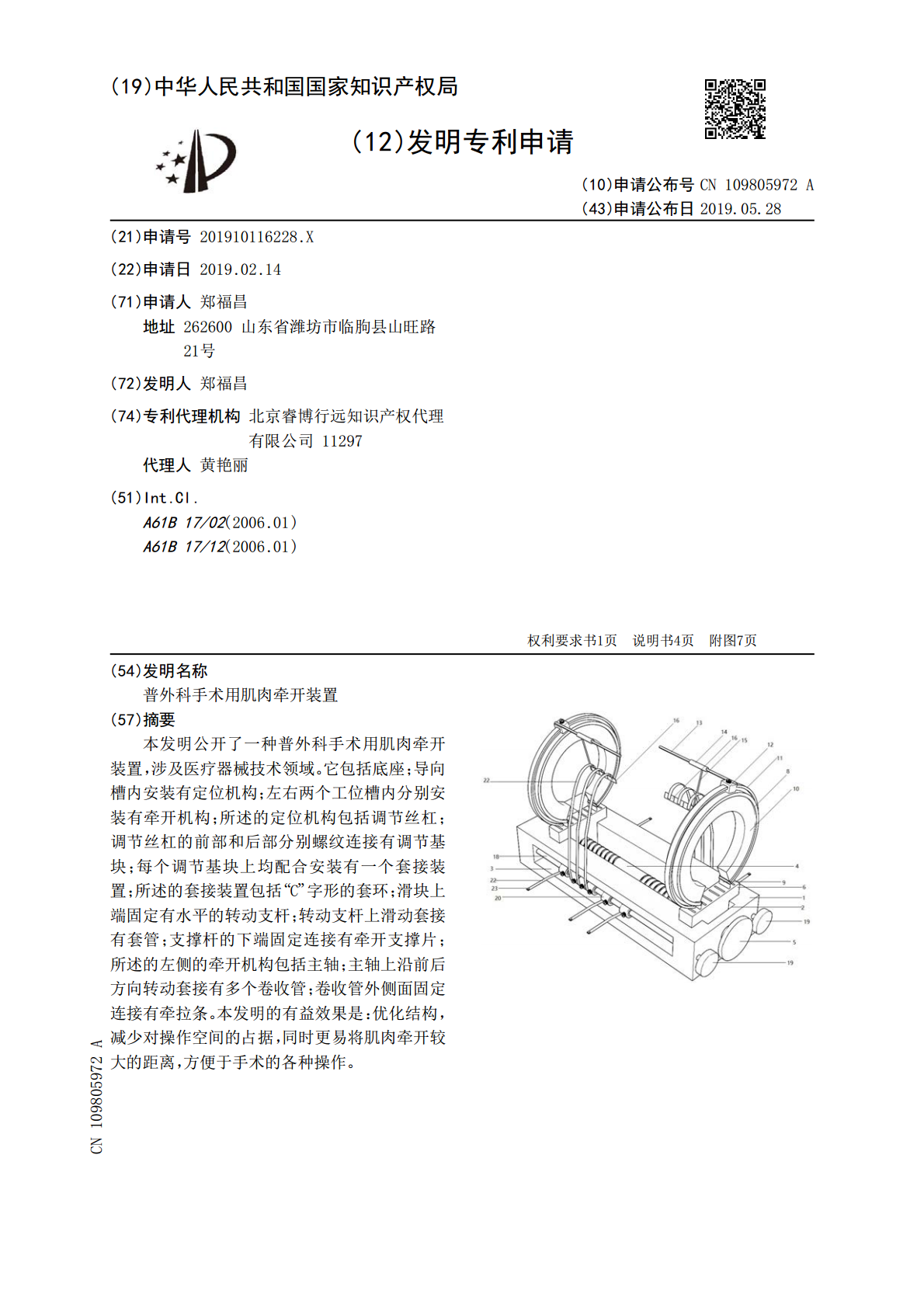
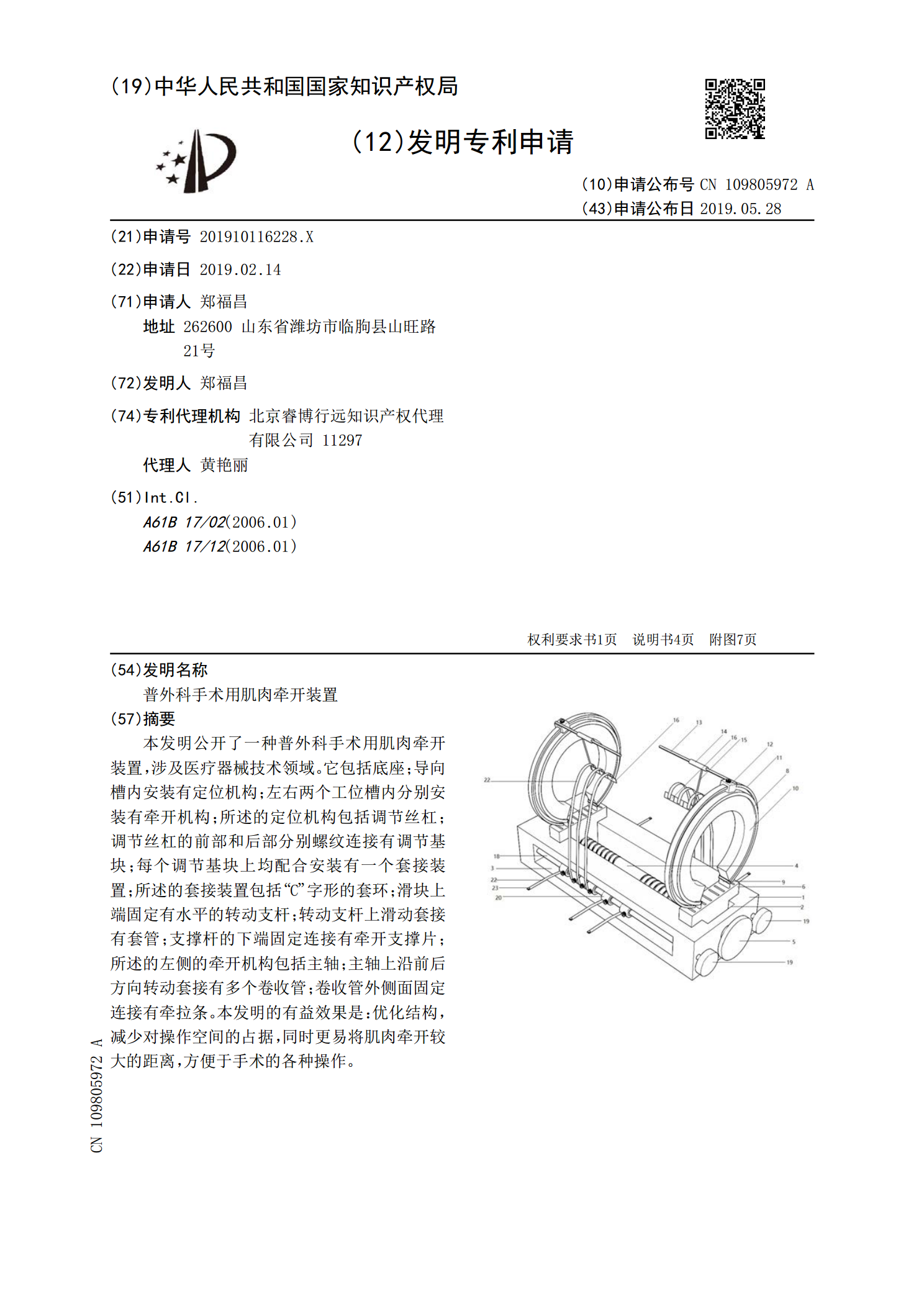
本发明公开了一种普外科手术用肌肉牵开装置,涉及医疗器械技术领域。它包括底座;导向槽内安装有定位机构;左右两个工位槽内分别安装有牵开机构;所述的定位机构包括调节丝杠;调节丝杠的前部和后部分别螺纹连接有调节基块;每个调节基块上均配合安装有一个套接装置;所述的套接装置包括“C”字形的套环;滑块上端固定有水平的转动支杆;转动支杆上滑动套接有套管;支撑杆的下端固定连接有牵开支撑片;所述的左侧的牵开机构包括主轴;主轴上沿前后方向转动套接有多个卷收管;卷收管外侧面固定连接有牵拉条。本发明的有益效果是:优化结构,减少对操
普外科手术用肌肉牵开装置.pdf
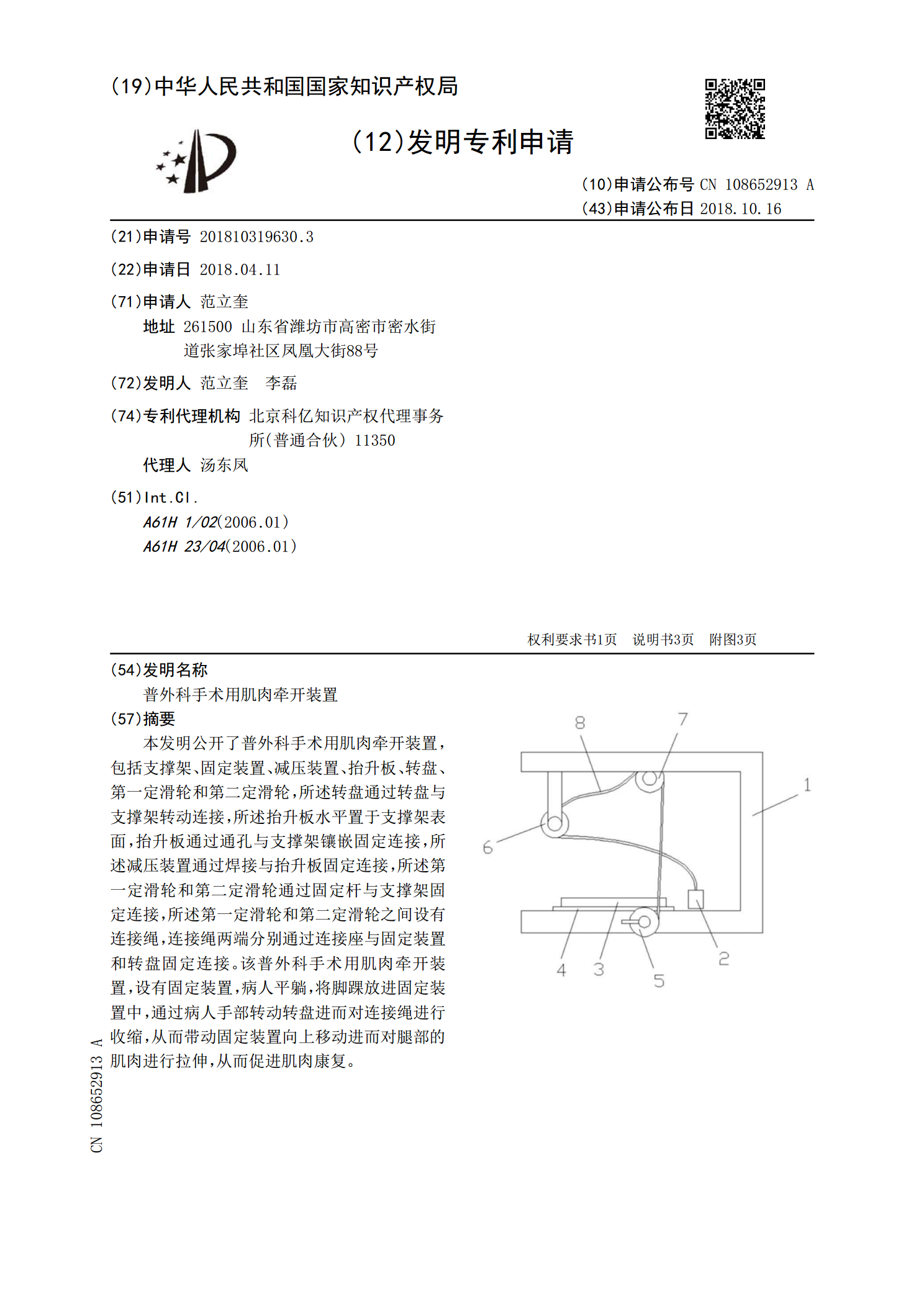
本发明公开了普外科手术用肌肉牵开装置,包括支撑架、固定装置、减压装置、抬升板、转盘、第一定滑轮和第二定滑轮,所述转盘通过转盘与支撑架转动连接,所述抬升板水平置于支撑架表面,抬升板通过通孔与支撑架镶嵌固定连接,所述减压装置通过焊接与抬升板固定连接,所述第一定滑轮和第二定滑轮通过固定杆与支撑架固定连接,所述第一定滑轮和第二定滑轮之间设有连接绳,连接绳两端分别通过连接座与固定装置和转盘固定连接。该普外科手术用肌肉牵开装置,设有固定装置,病人平躺,将脚踝放进固定装置中,通过病人手部转动转盘进而对连接绳进行收缩,从
普外科手术用肌肉牵开装置.pdf
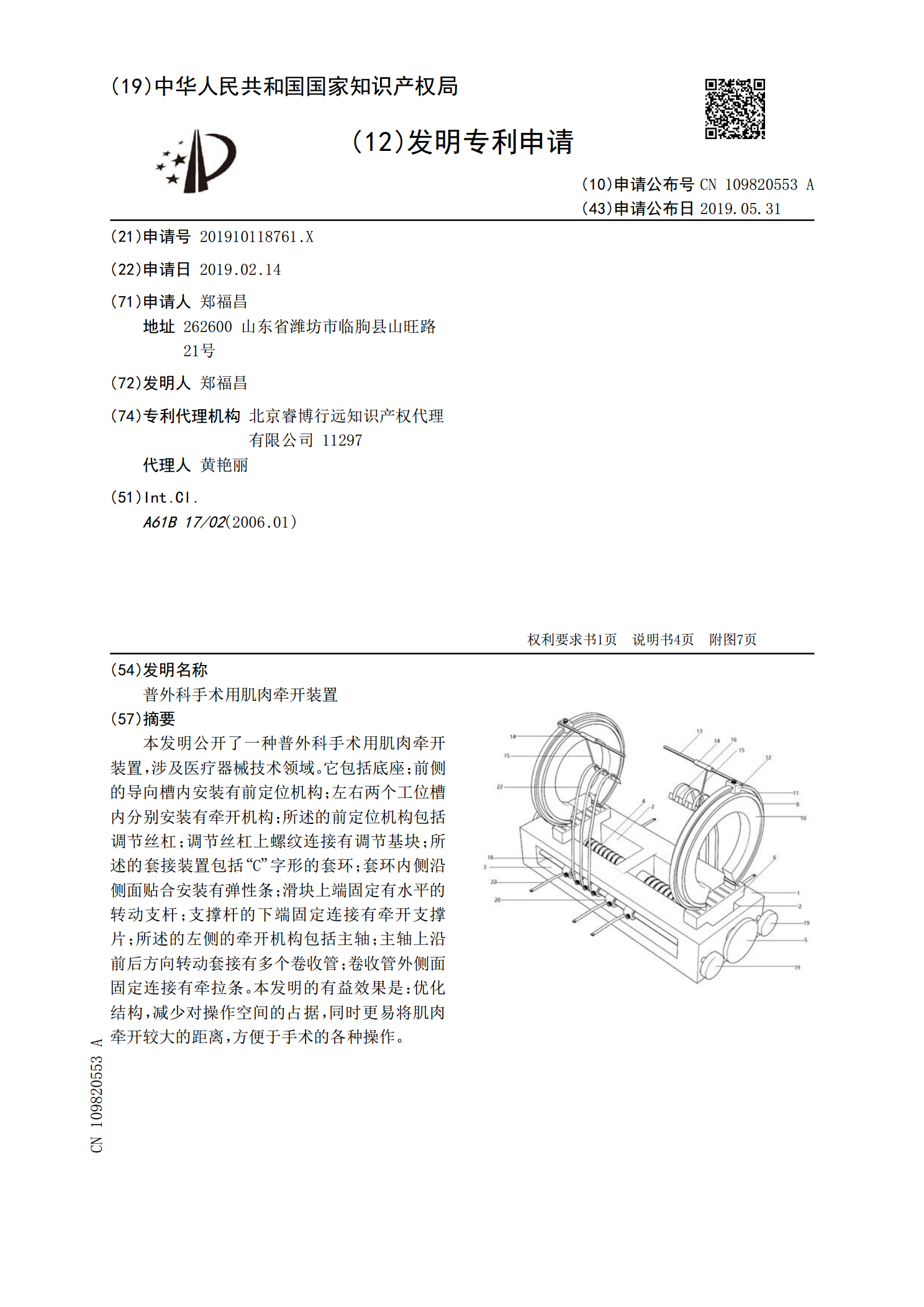
本发明公开了一种普外科手术用肌肉牵开装置,涉及医疗器械技术领域。它包括底座;前侧的导向槽内安装有前定位机构;左右两个工位槽内分别安装有牵开机构;所述的前定位机构包括调节丝杠;调节丝杠上螺纹连接有调节基块;所述的套接装置包括“C”字形的套环;套环内侧沿侧面贴合安装有弹性条;滑块上端固定有水平的转动支杆;支撑杆的下端固定连接有牵开支撑片;所述的左侧的牵开机构包括主轴;主轴上沿前后方向转动套接有多个卷收管;卷收管外侧面固定连接有牵拉条。本发明的有益效果是:优化结构,减少对操作空间的占据,同时更易将肌肉牵开较大的
普外科手术肌肉牵开装置.pdf
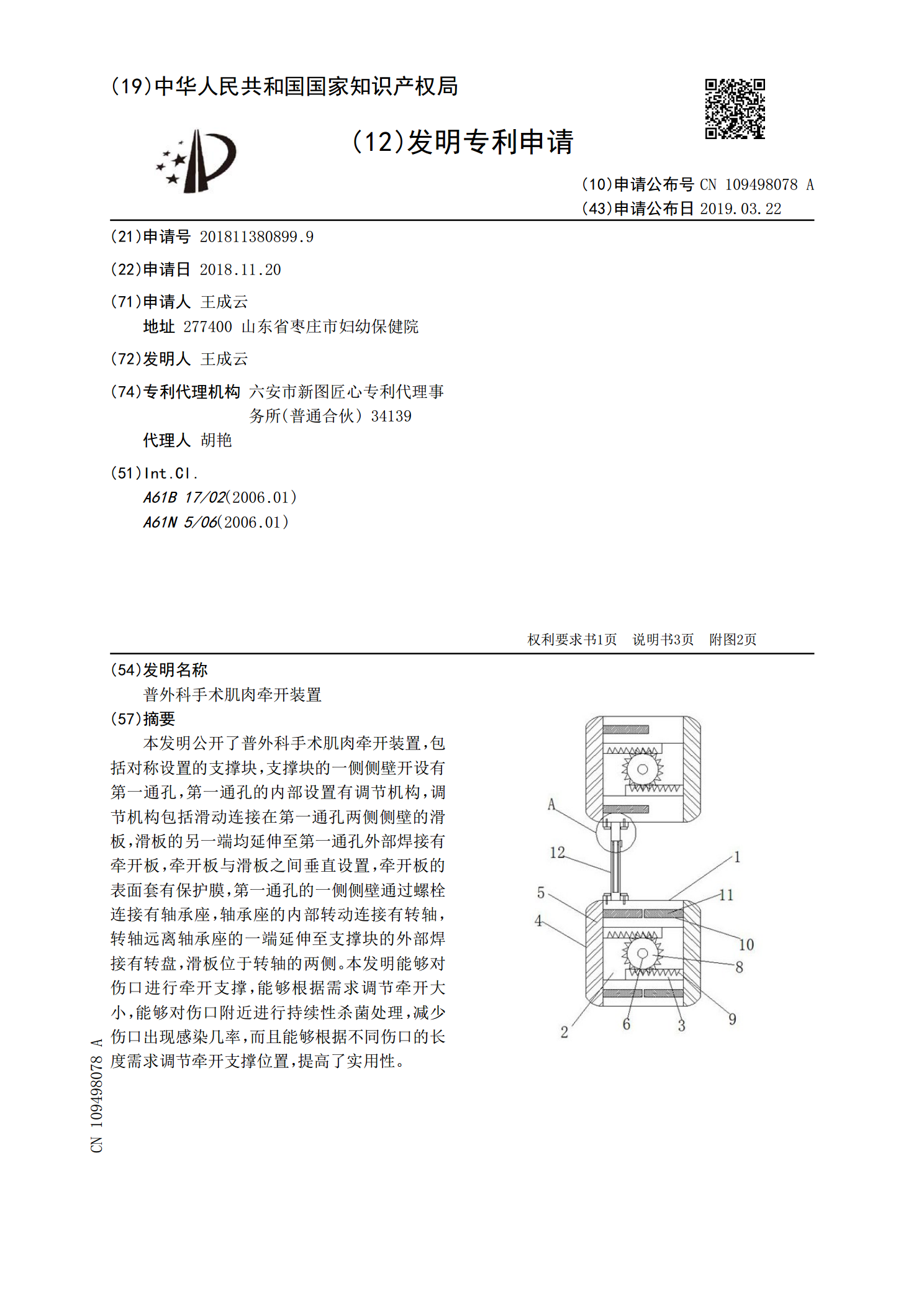
本发明公开了普外科手术肌肉牵开装置,包括对称设置的支撑块,支撑块的一侧侧壁开设有第一通孔,第一通孔的内部设置有调节机构,调节机构包括滑动连接在第一通孔两侧侧壁的滑板,滑板的另一端均延伸至第一通孔外部焊接有牵开板,牵开板与滑板之间垂直设置,牵开板的表面套有保护膜,第一通孔的一侧侧壁通过螺栓连接有轴承座,轴承座的内部转动连接有转轴,转轴远离轴承座的一端延伸至支撑块的外部焊接有转盘,滑板位于转轴的两侧。本发明能够对伤口进行牵开支撑,能够根据需求调节牵开大小,能够对伤口附近进行持续性杀菌处理,减少伤口出现感染几率

一种普外科手术用肌肉牵开装置.pdf
本发明公开了医疗器械技术领域的一种普外科手术用肌肉牵开装置,包括底座,底座顶部固定连接有万向软管,万向软管端部固定连接有连接管,连接管端部固定连接有安装架,安装架中间固定连接有左轴和右轴,左轴外壁转动连接有左开轮,右轴外壁转动连接有右开轮,左开轮侧壁转动连接有左撑钳,右开轮侧壁转动连接有右撑钳,左开轮和右开轮之间设有齿条,齿条顶部固定连接有滑杆,滑杆顶部固定连接有止位板,止位板中间开设有沉底槽,沉底槽内腔滑动连接有止位柱,止位柱外壁套有弹簧,安装架顶部开设有一组定位孔。本发明可灵活的放置在合适位置,所占空