
一种普外科手术用肌肉牵开装置.pdf

努力****恨风

1/10
2/10

3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
普外科手术用肌肉牵开装置.pdf
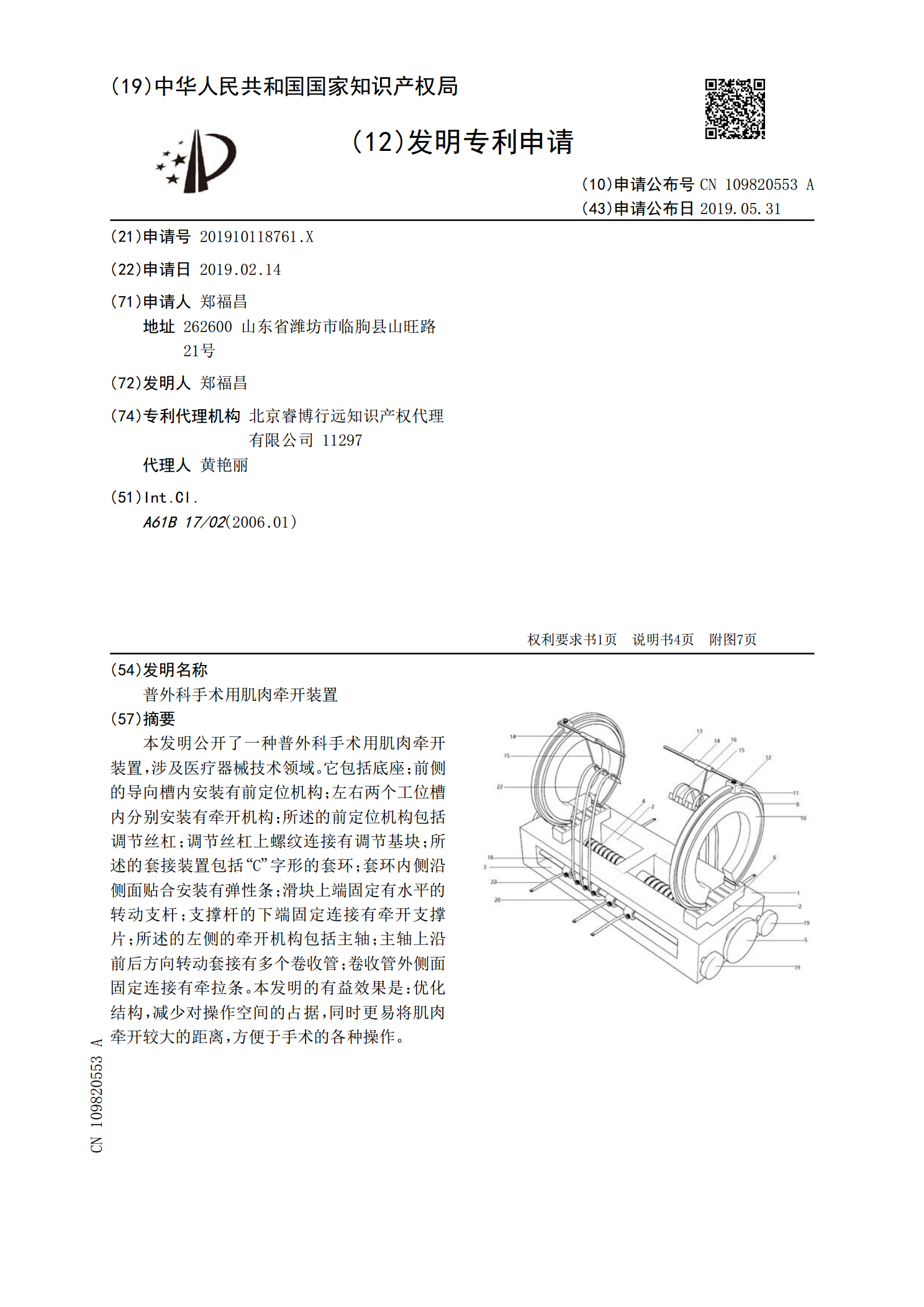
本发明公开了一种普外科手术用肌肉牵开装置,涉及医疗器械技术领域。它包括底座;前侧的导向槽内安装有前定位机构;左右两个工位槽内分别安装有牵开机构;所述的前定位机构包括调节丝杠;调节丝杠上螺纹连接有调节基块;所述的套接装置包括“C”字形的套环;套环内侧沿侧面贴合安装有弹性条;滑块上端固定有水平的转动支杆;支撑杆的下端固定连接有牵开支撑片;所述的左侧的牵开机构包括主轴;主轴上沿前后方向转动套接有多个卷收管;卷收管外侧面固定连接有牵拉条。本发明的有益效果是:优化结构,减少对操作空间的占据,同时更易将肌肉牵开较大的
普外科手术用肌肉牵开装置.pdf
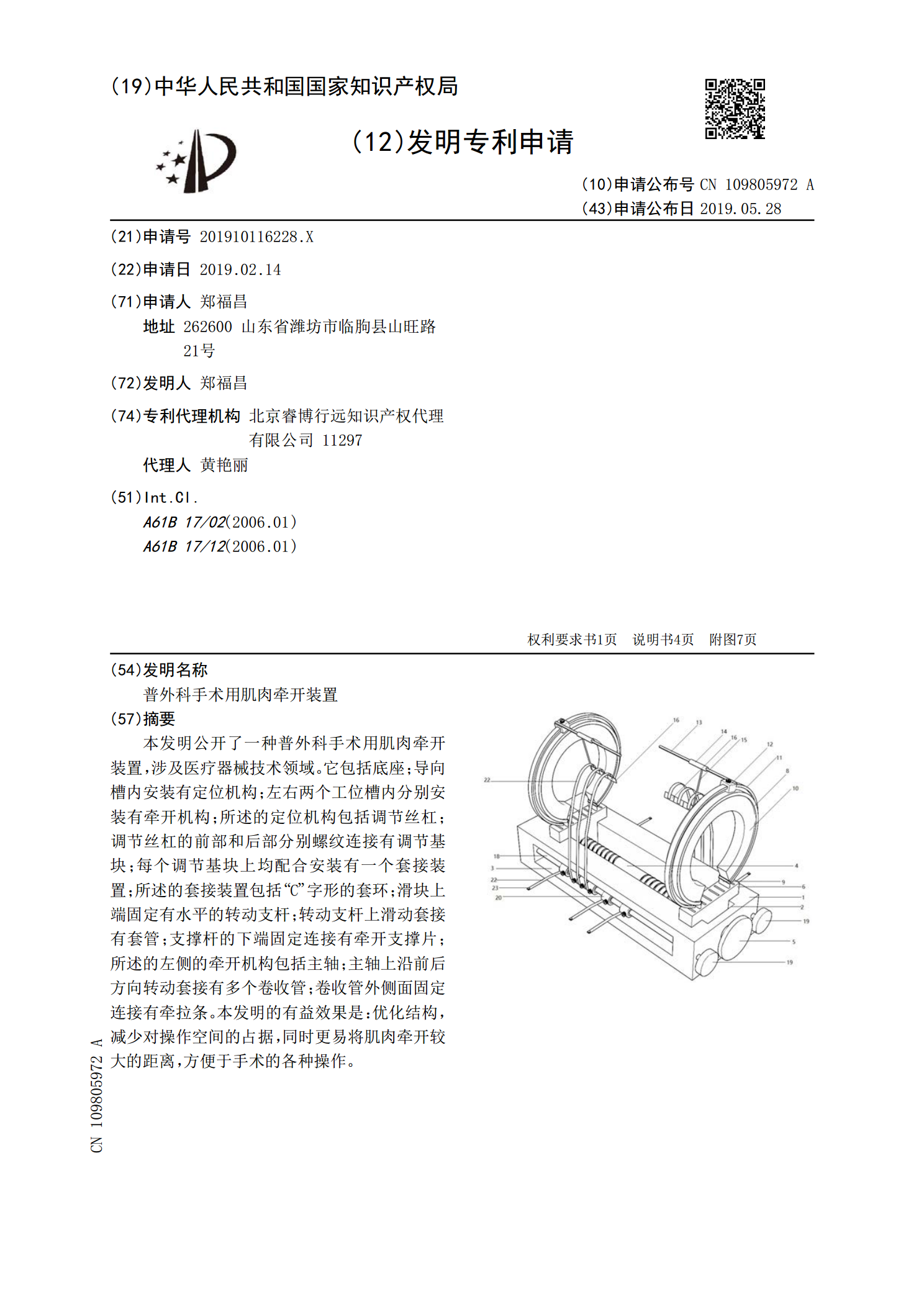
本发明公开了一种普外科手术用肌肉牵开装置,涉及医疗器械技术领域。它包括底座;导向槽内安装有定位机构;左右两个工位槽内分别安装有牵开机构;所述的定位机构包括调节丝杠;调节丝杠的前部和后部分别螺纹连接有调节基块;每个调节基块上均配合安装有一个套接装置;所述的套接装置包括“C”字形的套环;滑块上端固定有水平的转动支杆;转动支杆上滑动套接有套管;支撑杆的下端固定连接有牵开支撑片;所述的左侧的牵开机构包括主轴;主轴上沿前后方向转动套接有多个卷收管;卷收管外侧面固定连接有牵拉条。本发明的有益效果是:优化结构,减少对操
普外科手术用肌肉牵开装置.pdf
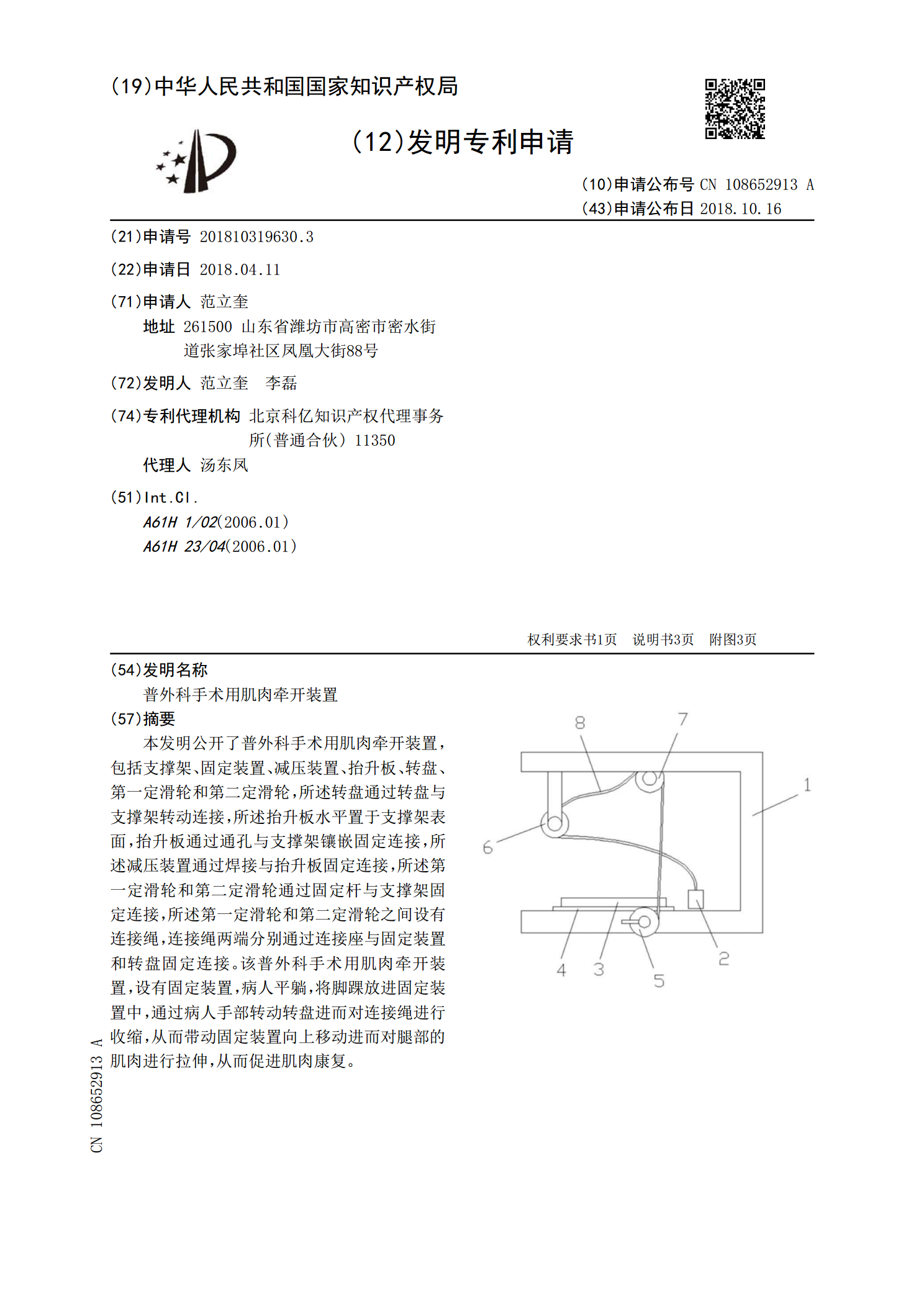
本发明公开了普外科手术用肌肉牵开装置,包括支撑架、固定装置、减压装置、抬升板、转盘、第一定滑轮和第二定滑轮,所述转盘通过转盘与支撑架转动连接,所述抬升板水平置于支撑架表面,抬升板通过通孔与支撑架镶嵌固定连接,所述减压装置通过焊接与抬升板固定连接,所述第一定滑轮和第二定滑轮通过固定杆与支撑架固定连接,所述第一定滑轮和第二定滑轮之间设有连接绳,连接绳两端分别通过连接座与固定装置和转盘固定连接。该普外科手术用肌肉牵开装置,设有固定装置,病人平躺,将脚踝放进固定装置中,通过病人手部转动转盘进而对连接绳进行收缩,从
一种普外科手术用肌肉牵开装置.pdf
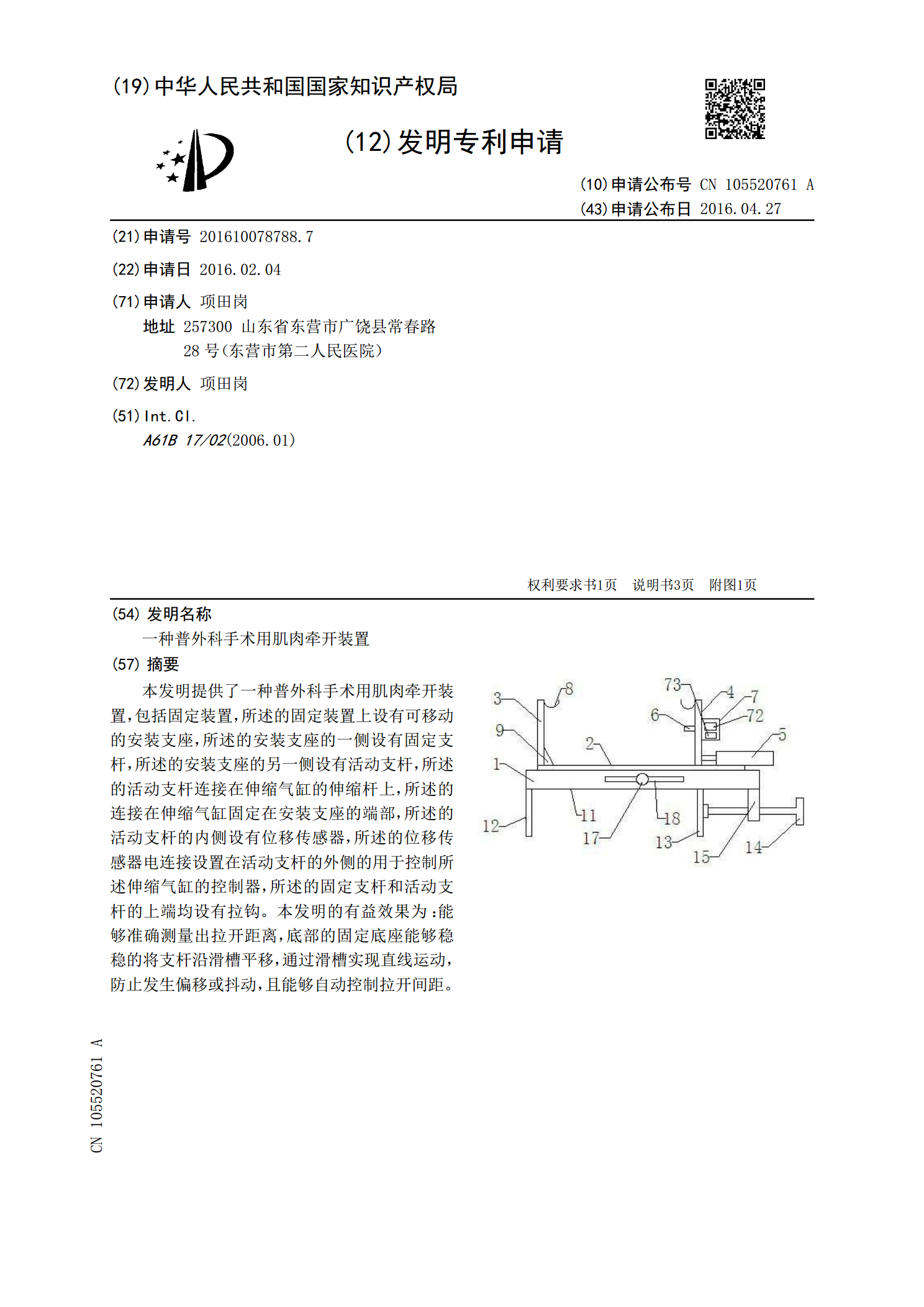
本发明提供了一种普外科手术用肌肉牵开装置,包括固定装置,所述的固定装置上设有可移动的安装支座,所述的安装支座的一侧设有固定支杆,所述的安装支座的另一侧设有活动支杆,所述的活动支杆连接在伸缩气缸的伸缩杆上,所述的连接在伸缩气缸固定在安装支座的端部,所述的活动支杆的内侧设有位移传感器,所述的位移传感器电连接设置在活动支杆的外侧的用于控制所述伸缩气缸的控制器,所述的固定支杆和活动支杆的上端均设有拉钩。本发明的有益效果为:能够准确测量出拉开距离,底部的固定底座能够稳稳的将支杆沿滑槽平移,通过滑槽实现直线运动,防止

一种普外科手术用肌肉牵开装置.pdf
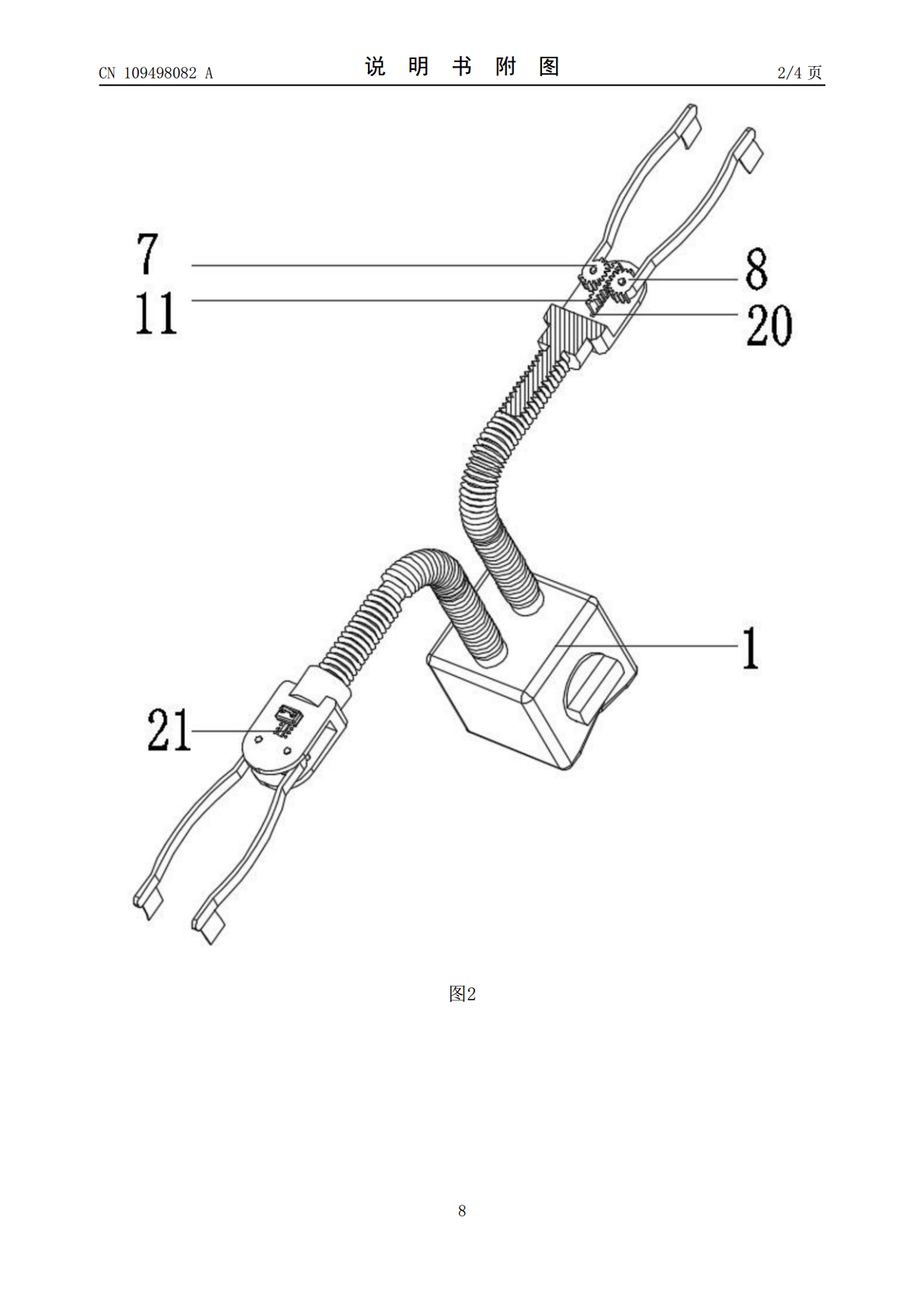
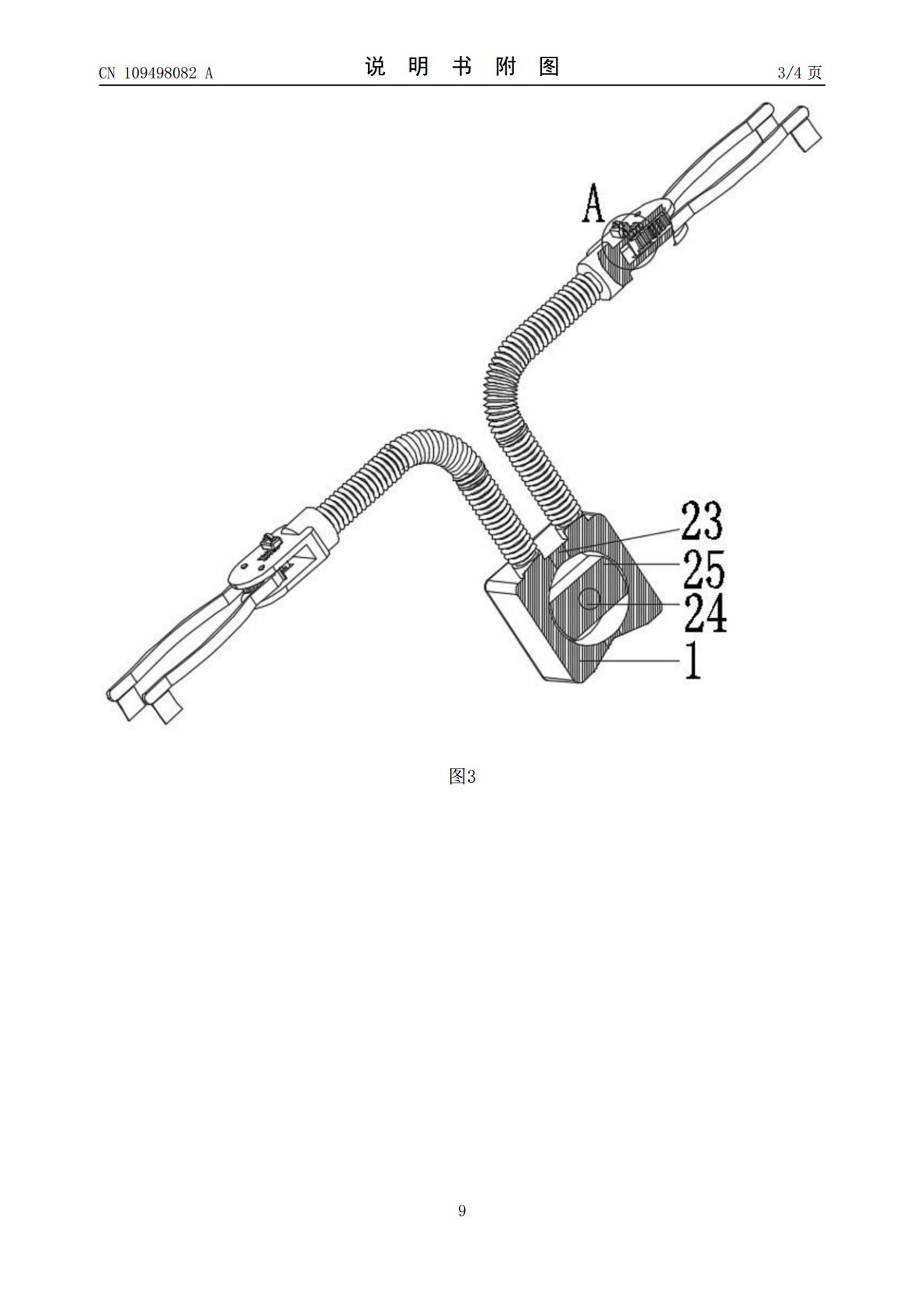
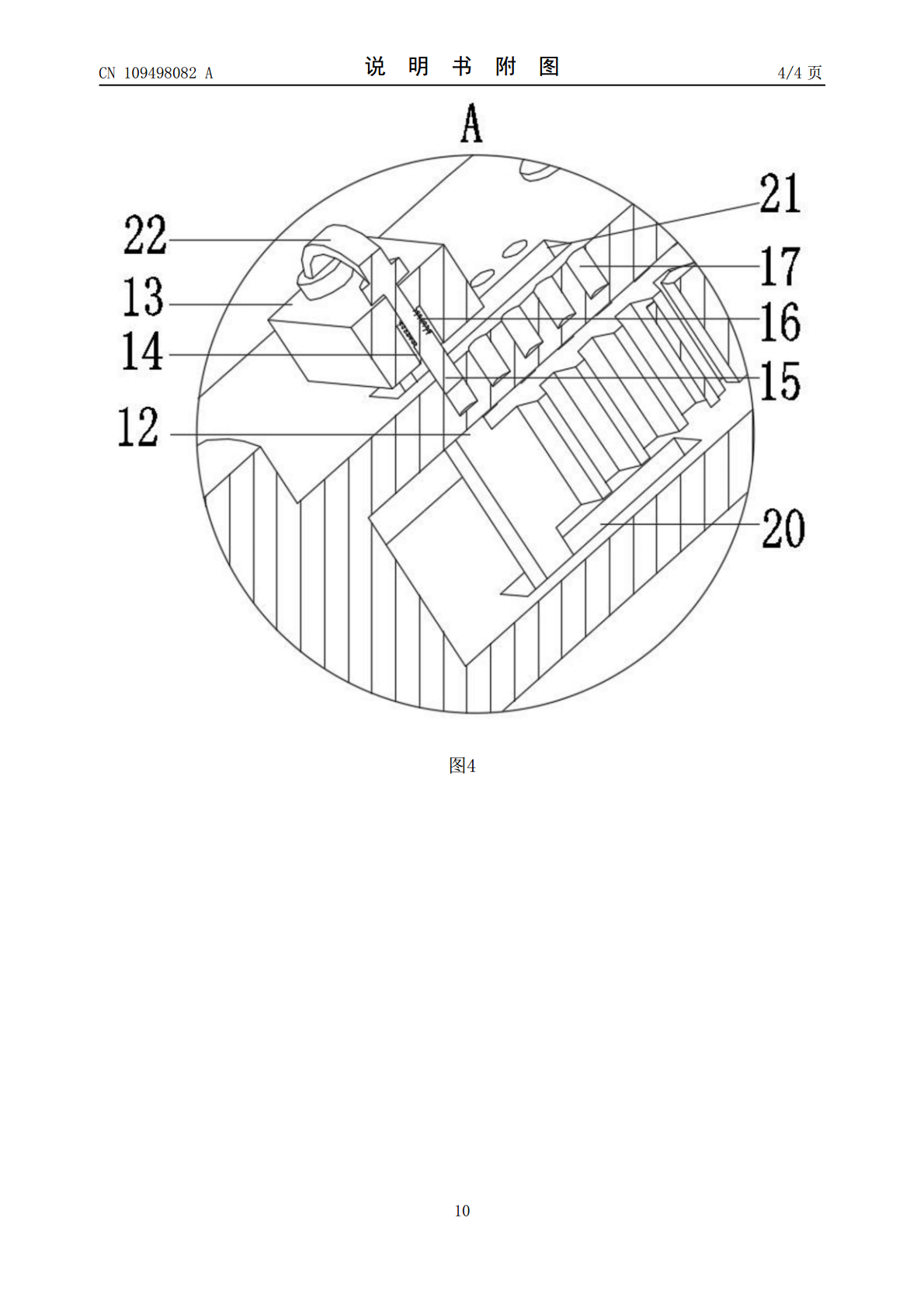
本发明公开了医疗器械技术领域的一种普外科手术用肌肉牵开装置,包括底座,底座顶部固定连接有万向软管,万向软管端部固定连接有连接管,连接管端部固定连接有安装架,安装架中间固定连接有左轴和右轴,左轴外壁转动连接有左开轮,右轴外壁转动连接有右开轮,左开轮侧壁转动连接有左撑钳,右开轮侧壁转动连接有右撑钳,左开轮和右开轮之间设有齿条,齿条顶部固定连接有滑杆,滑杆顶部固定连接有止位板,止位板中间开设有沉底槽,沉底槽内腔滑动连接有止位柱,止位柱外壁套有弹簧,安装架顶部开设有一组定位孔。本发明可灵活的放置在合适位置,所占空