
一种具有除尘功能的可靠性高的玻璃搬运机器人.pdf

邻家****66

1/10

2/10

3/10
4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种具有除尘功能的可靠性高的玻璃搬运机器人.pdf
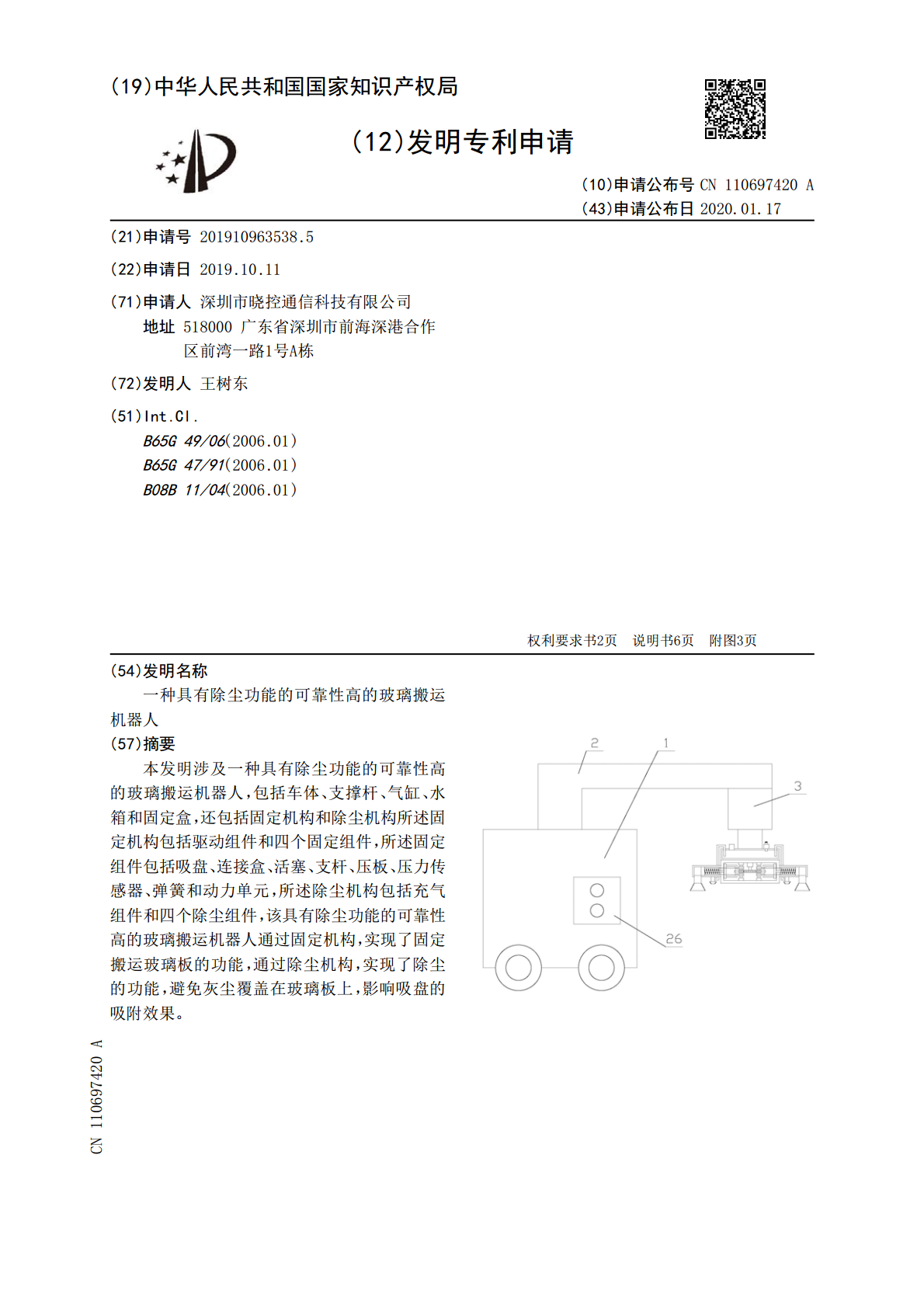
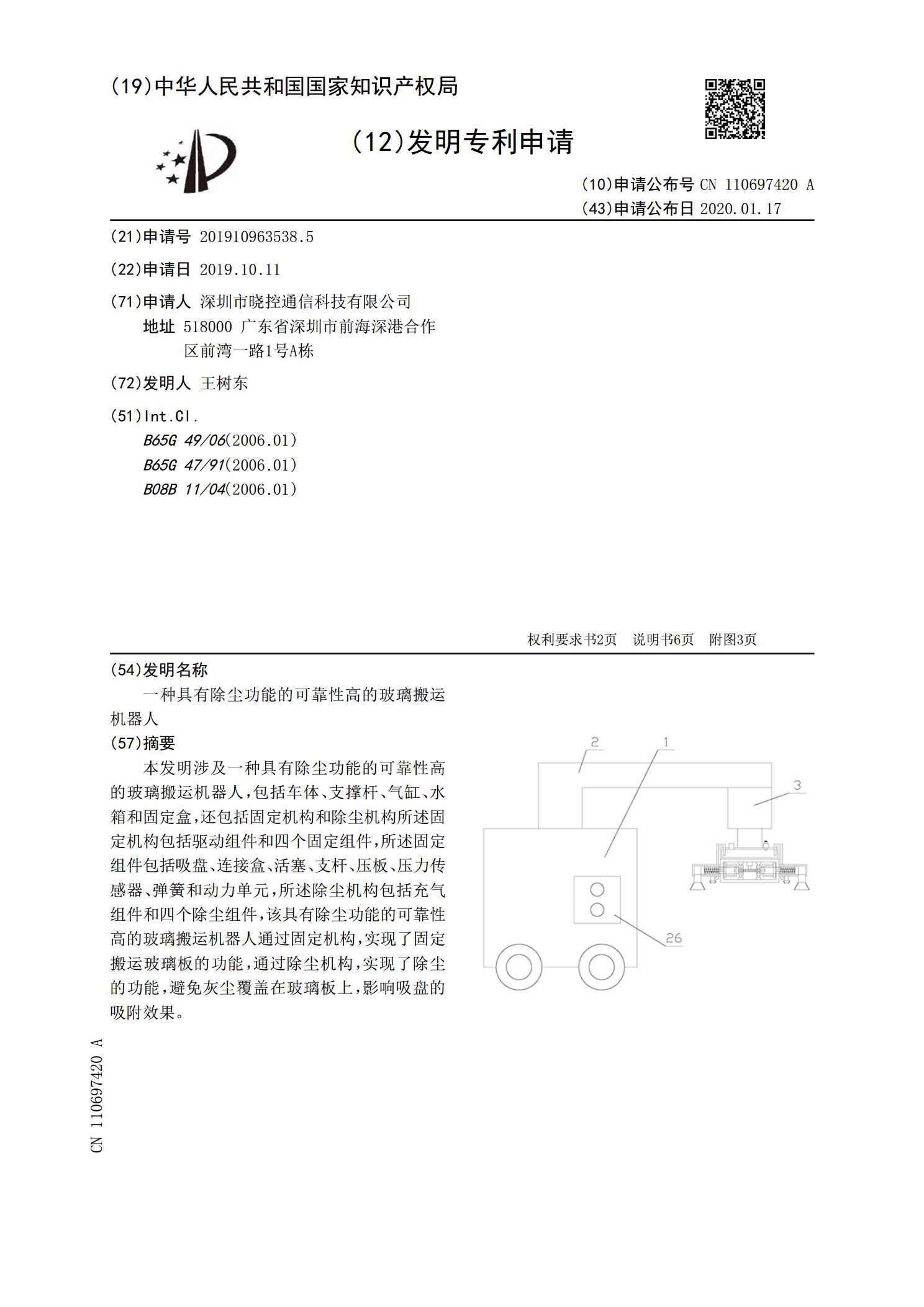
本发明涉及一种具有除尘功能的可靠性高的玻璃搬运机器人,包括车体、支撑杆、气缸、水箱和固定盒,还包括固定机构和除尘机构所述固定机构包括驱动组件和四个固定组件,所述固定组件包括吸盘、连接盒、活塞、支杆、压板、压力传感器、弹簧和动力单元,所述除尘机构包括充气组件和四个除尘组件,该具有除尘功能的可靠性高的玻璃搬运机器人通过固定机构,实现了固定搬运玻璃板的功能,通过除尘机构,实现了除尘的功能,避免灰尘覆盖在玻璃板上,影响吸盘的吸附效果。
一种用于隧道的具有除尘功能的可靠性高的LED灯.pdf
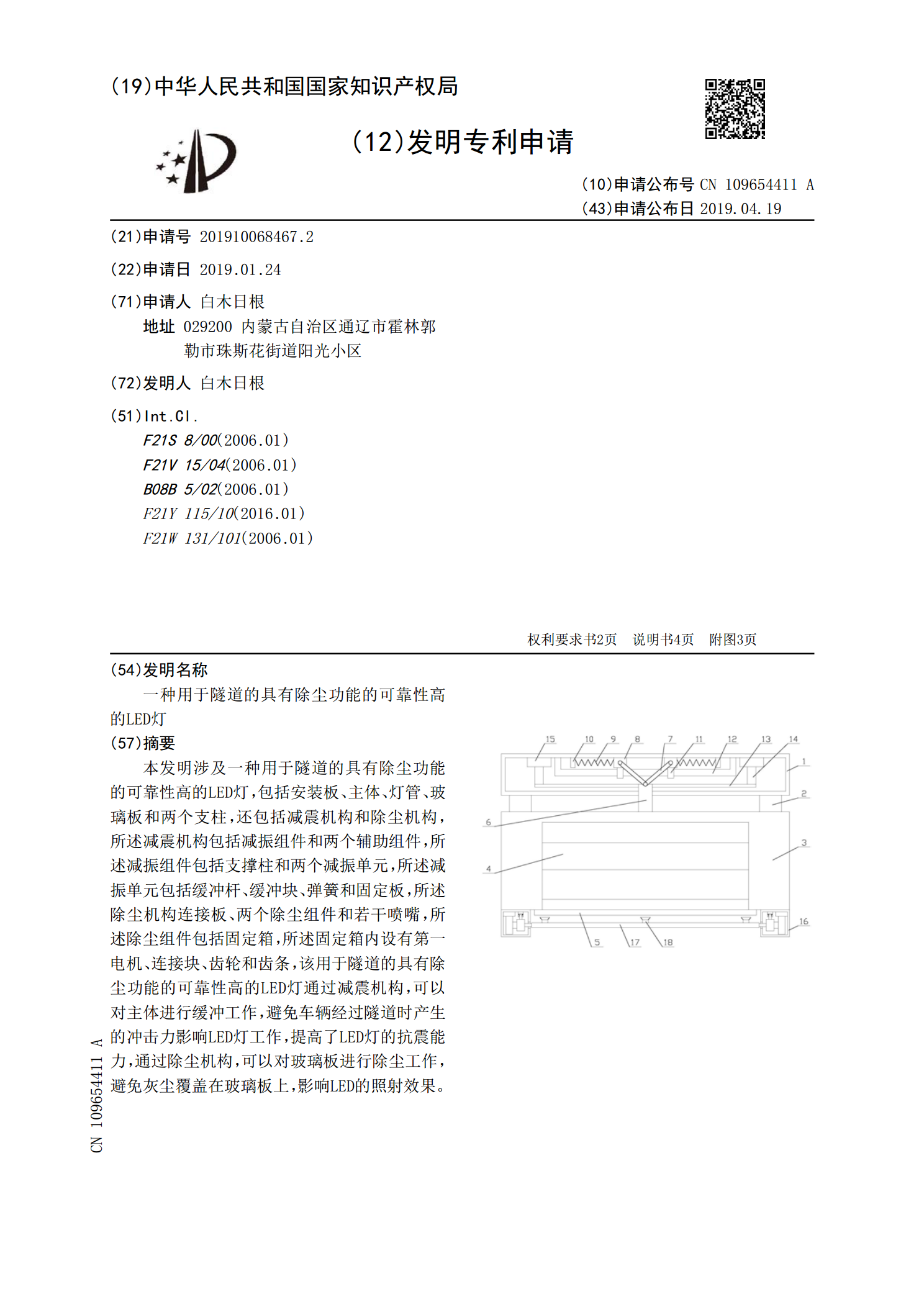
本发明涉及一种用于隧道的具有除尘功能的可靠性高的LED灯,包括安装板、主体、灯管、玻璃板和两个支柱,还包括减震机构和除尘机构,所述减震机构包括减振组件和两个辅助组件,所述减振组件包括支撑柱和两个减振单元,所述减振单元包括缓冲杆、缓冲块、弹簧和固定板,所述除尘机构连接板、两个除尘组件和若干喷嘴,所述除尘组件包括固定箱,所述固定箱内设有第一电机、连接块、齿轮和齿条,该用于隧道的具有除尘功能的可靠性高的LED灯通过减震机构,可以对主体进行缓冲工作,避免车辆经过隧道时产生的冲击力影响LED灯工作,提高了LED灯的

一种具有除尘功能的安全可靠性高的安防巡逻机器人.pdf
本发明涉及一种具有除尘功能的安全可靠性高的安防巡逻机器人,包括主体、支柱、支板、摄像头、两个固定盒和两个移动轮,还包括除尘机构和两个升降机构,所述除尘机构包括连接盒、制气组件、两个移动组件和若干喷嘴,所述移动组件包括第一电机、套管、丝杆和支杆,所述升降机构包括第二电机、绕线盘、弹簧和两个拉绳,该具有除尘功能的安全可靠性高的安防巡逻机器人通过除尘机构,可以除去摄像头上的灰尘,避免灰尘覆盖在摄像头上,影响摄像头的拍摄效果,通过升降机构,可以调节主体的高度,避免设备移动时,地面上的积水被溅起而进入主体的内部,从
一种具有清扫功能的稳定性高的搬运机器人.pdf
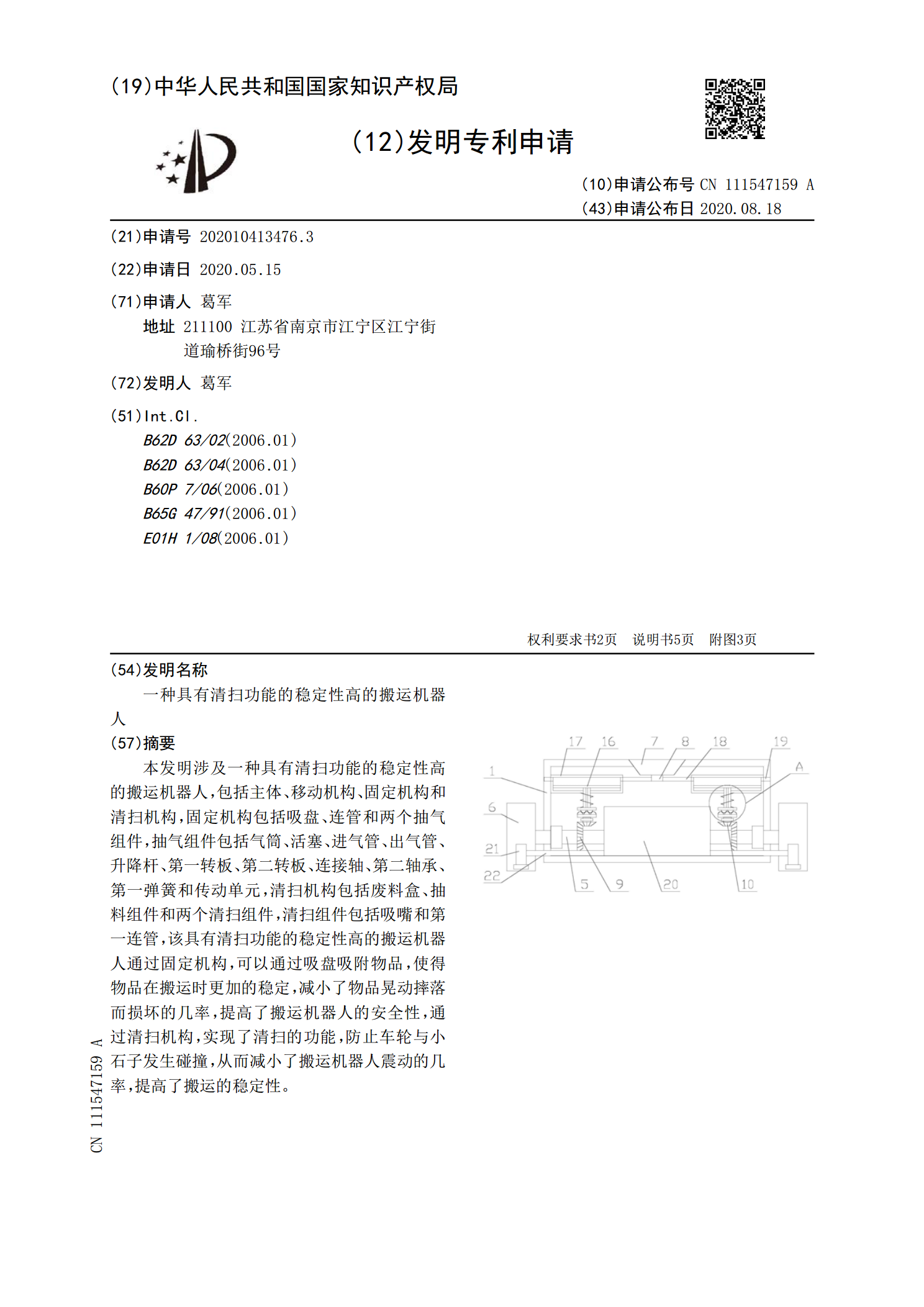
本发明涉及一种具有清扫功能的稳定性高的搬运机器人,包括主体、移动机构、固定机构和清扫机构,固定机构包括吸盘、连管和两个抽气组件,抽气组件包括气筒、活塞、进气管、出气管、升降杆、第一转板、第二转板、连接轴、第二轴承、第一弹簧和传动单元,清扫机构包括废料盒、抽料组件和两个清扫组件,清扫组件包括吸嘴和第一连管,该具有清扫功能的稳定性高的搬运机器人通过固定机构,可以通过吸盘吸附物品,使得物品在搬运时更加的稳定,减小了物品晃动摔落而损坏的几率,提高了搬运机器人的安全性,通过清扫机构,实现了清扫的功能,防止车轮与小石
一种具有除尘功能的安全可靠性高的庭院照明设备.pdf
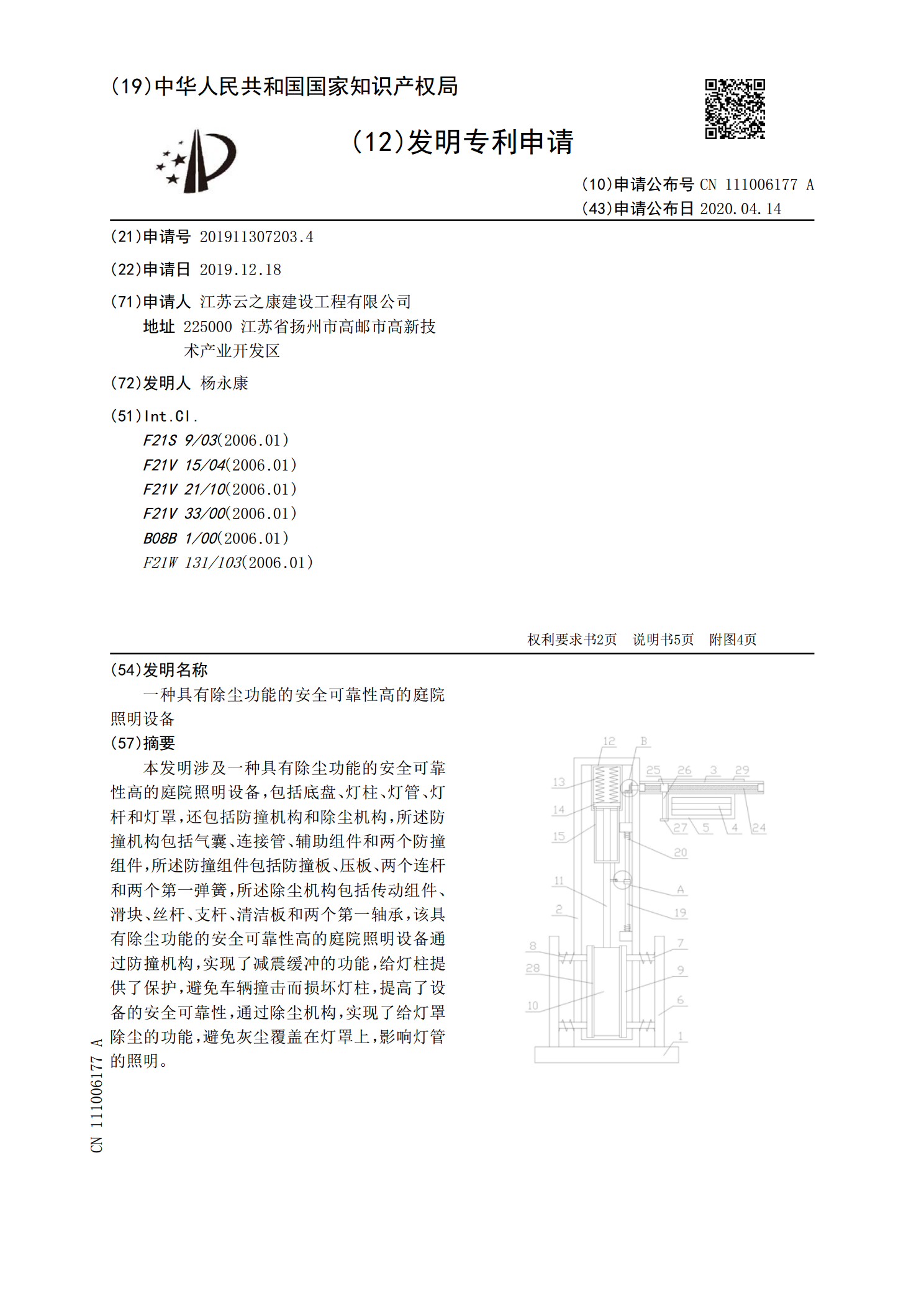
本发明涉及一种具有除尘功能的安全可靠性高的庭院照明设备,包括底盘、灯柱、灯管、灯杆和灯罩,还包括防撞机构和除尘机构,所述防撞机构包括气囊、连接管、辅助组件和两个防撞组件,所述防撞组件包括防撞板、压板、两个连杆和两个第一弹簧,所述除尘机构包括传动组件、滑块、丝杆、支杆、清洁板和两个第一轴承,该具有除尘功能的安全可靠性高的庭院照明设备通过防撞机构,实现了减震缓冲的功能,给灯柱提供了保护,避免车辆撞击而损坏灯柱,提高了设备的安全可靠性,通过除尘机构,实现了给灯罩除尘的功能,避免灰尘覆盖在灯罩上,影响灯管的照明。