
一种悬挂式工业机器人.pdf

森林****io

1/7
2/7

3/7
4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种悬挂式工业机器人.pdf
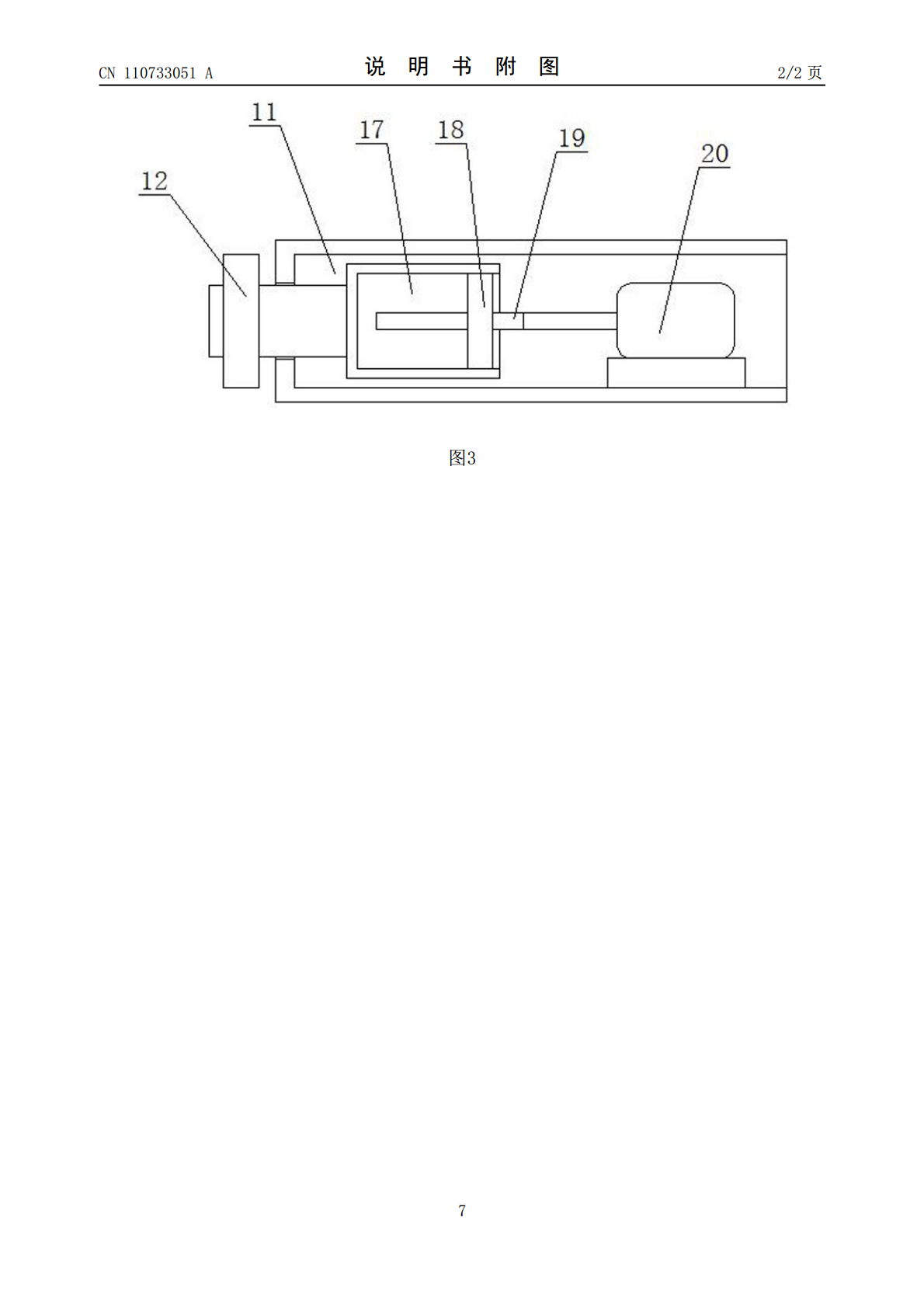
本发明属于工业机器人领域,尤其是一种悬挂式工业机器人,针对现有的技术中存在技术方案在使用时,只是单纯的依靠夹紧力,对物料进行夹紧,这样在运输货物时,若是货物的重量特别重时,就会存在脱落的问题,现提出如下方案,其包括安装板,所述安装板的底部对称转动连接有两个夹板,且两个夹板相互靠近的一侧顶部均转动连接有连杆,两个连杆相互靠近的一端转动连接有同一个支撑杆,本发明通过启动抱闸电机可以实现两个夹板对物体进行夹紧,之后启动气缸可以带动拖杆转动至与物体的底部相接触,即可以实现在对物体进行夹紧的同时又可以实现对物体的支
一种悬挂式单轨检测机器人及悬挂式单轨检测方法.pdf
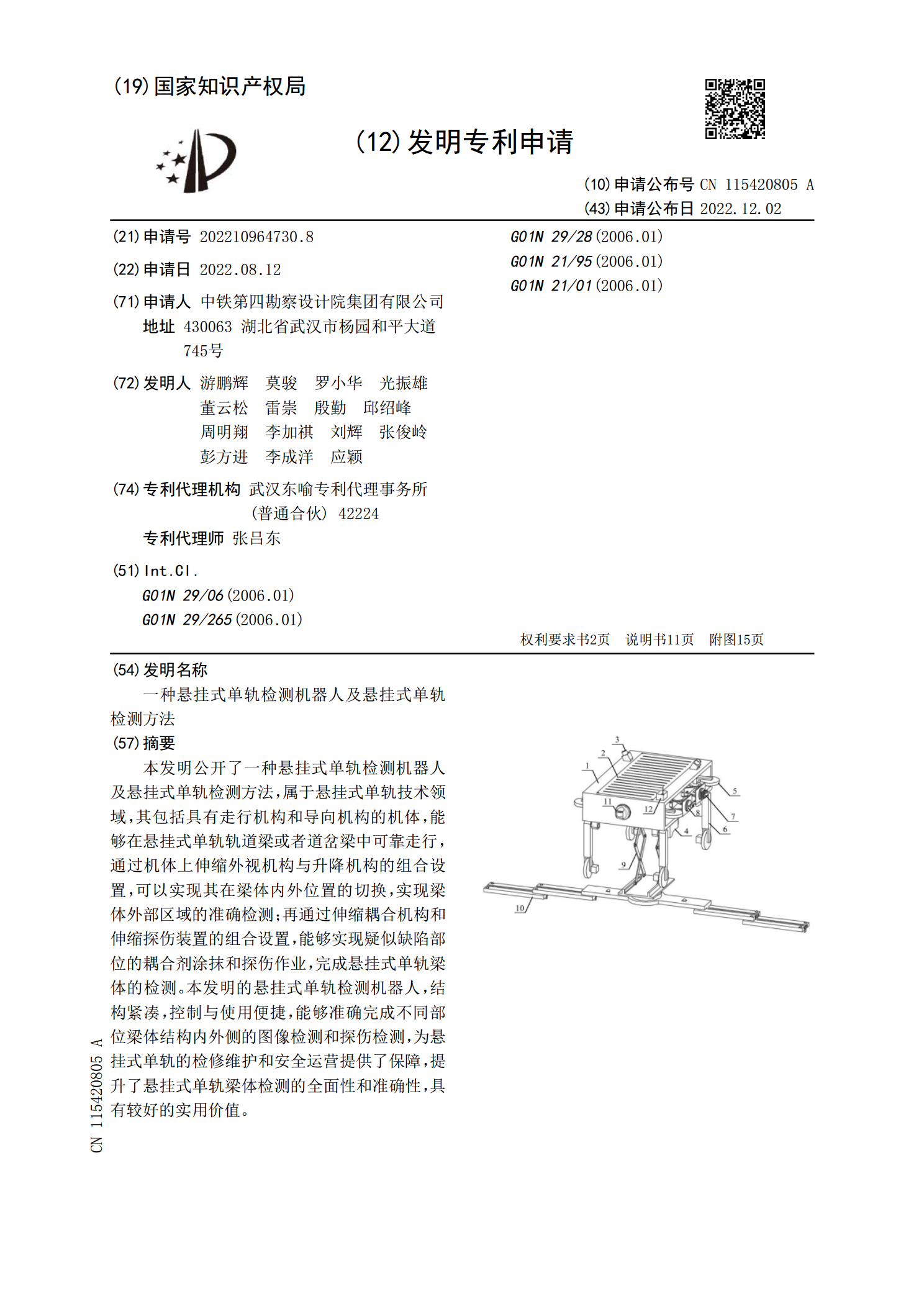
本发明公开了一种悬挂式单轨检测机器人及悬挂式单轨检测方法,属于悬挂式单轨技术领域,其包括具有走行机构和导向机构的机体,能够在悬挂式单轨轨道梁或者道岔梁中可靠走行,通过机体上伸缩外视机构与升降机构的组合设置,可以实现其在梁体内外位置的切换,实现梁体外部区域的准确检测;再通过伸缩耦合机构和伸缩探伤装置的组合设置,能够实现疑似缺陷部位的耦合剂涂抹和探伤作业,完成悬挂式单轨梁体的检测。本发明的悬挂式单轨检测机器人,结构紧凑,控制与使用便捷,能够准确完成不同部位梁体结构内外侧的图像检测和探伤检测,为悬挂式单轨的检修
悬挂式机器人导轨、悬挂式机器人及其运行系统.pdf
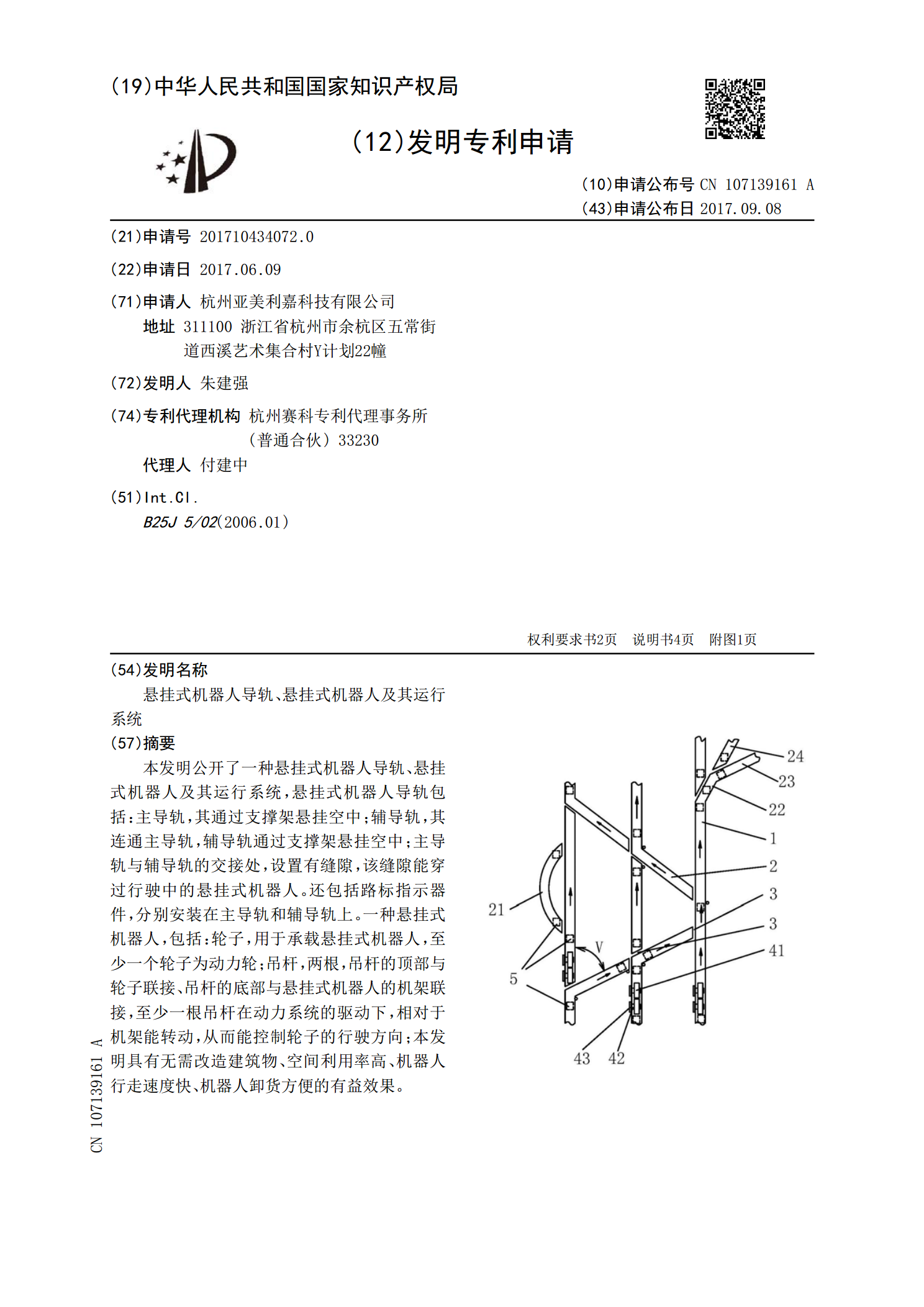
本发明公开了一种悬挂式机器人导轨、悬挂式机器人及其运行系统,悬挂式机器人导轨包括:主导轨,其通过支撑架悬挂空中;辅导轨,其连通主导轨,辅导轨通过支撑架悬挂空中;主导轨与辅导轨的交接处,设置有缝隙,该缝隙能穿过行驶中的悬挂式机器人。还包括路标指示器件,分别安装在主导轨和辅导轨上。一种悬挂式机器人,包括:轮子,用于承载悬挂式机器人,至少一个轮子为动力轮;吊杆,两根,吊杆的顶部与轮子联接、吊杆的底部与悬挂式机器人的机架联接,至少一根吊杆在动力系统的驱动下,相对于机架能转动,从而能控制轮子的行驶方向;本发明具有无

一种悬挂避震式机器人.pdf
本发明提供一种悬挂避震式机器人,其包括机器人底盘;固定安装在机器人底盘上的避震器支架;设置在机器人底盘左侧的左支撑组件,左支撑组件的一端可活动的安装在机器人底盘上,另一端可活动的连接在左避震器的下端,左避震器的上端固定安装在避震器支架上;设置在机器人底盘右侧的右支撑组件,右支撑组件的一端可活动的安装在机器人底盘上,另一端可活动的连接在右避震器的下端,右避震器的上端固定安装在避震器支架上;可活动的安装在左支撑组件的左轮;可活动的安装在右支撑组件上的右轮;以及安装在机器人底盘上并用于驱动左轮和右轮的驱动电机。

一种悬挂式轨道检测机器人.pdf
本发明公开了一种悬挂式轨道检测机器人,属于起重机轨道检测机器人领域,包括轨道结构、运动模块、电子设备模块、连接轴、定位螺母、360度多棱镜、全站仪以及机器人软件开发技术路线。运动模块包括驱动轮组件、压紧轮组件、支撑轮组件、副壳体、环抱轮组件、弹簧减震、电机和运动壳体;电子设备模块包括运动、测量、数据存储、状态监控、参数设置模块。本发明提供了一种新型悬挂式轨道检测机器人,其特点是,采用模块化设计并可以随时从轨道上拆卸,在机器人维修维护以及适应不同的轨道宽度上面,有显著优势,更能节省成本,并且在数据处理方式上