
一种用于搬运轮胎的机械手的工作方法.pdf

一条****丹淑

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于搬运轮胎的机械手的工作方法.pdf
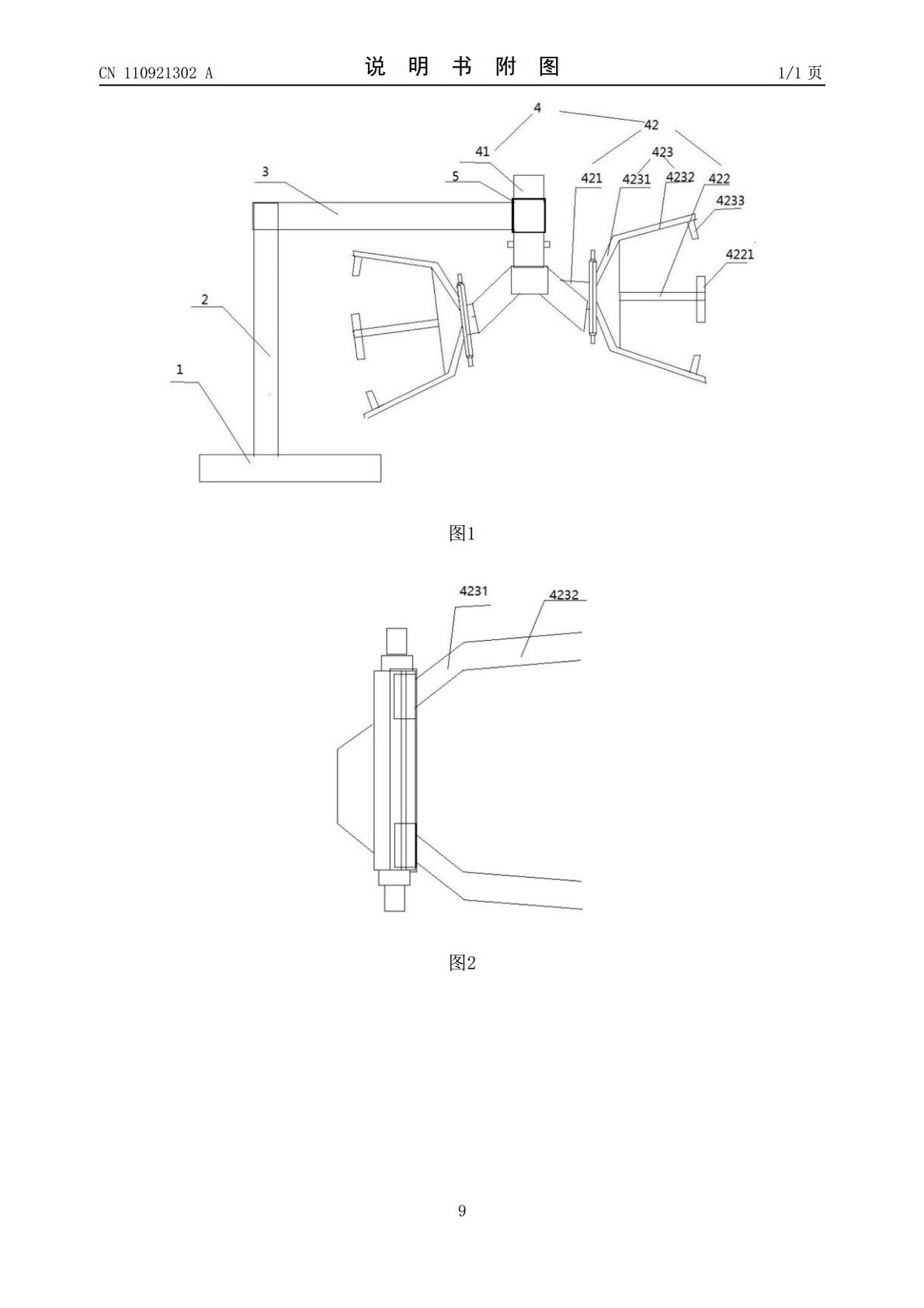
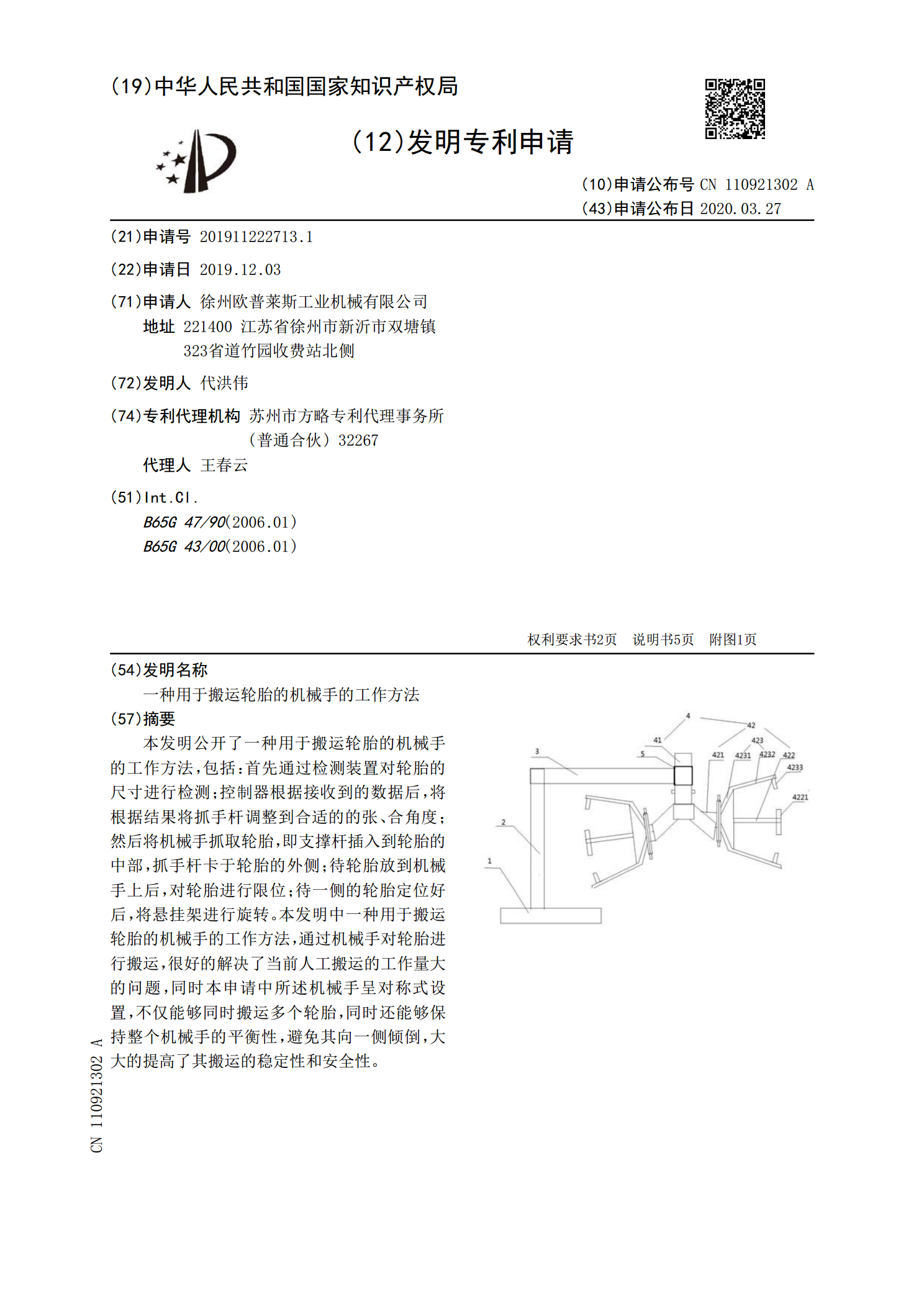
本发明公开了一种用于搬运轮胎的机械手的工作方法,包括:首先通过检测装置对轮胎的尺寸进行检测;控制器根据接收到的数据后,将根据结果将抓手杆调整到合适的的张、合角度;然后将机械手抓取轮胎,即支撑杆插入到轮胎的中部,抓手杆卡于轮胎的外侧;待轮胎放到机械手上后,对轮胎进行限位;待一侧的轮胎定位好后,将悬挂架进行旋转。本发明中一种用于搬运轮胎的机械手的工作方法,通过机械手对轮胎进行搬运,很好的解决了当前人工搬运的工作量大的问题,同时本申请中所述机械手呈对称式设置,不仅能够同时搬运多个轮胎,同时还能够保持整个机械手的
一种用于轮胎搬运的稳定、安全型机械手.pdf
本发明公开了一种用于轮胎搬运的稳定、安全型机械手,包括:基座、立柱、机械臂和一组机械手,所述立柱设于基座上,所述机械臂安装于立柱上,所述机械手安装于机械臂上;所述机械手中设有悬挂架和抓取手,所述悬挂架安装于机械臂的安装轴上,所述悬挂架上相对设有一组抓取手,所述抓取手采用对称、错位式设置,所述安装轴与机械臂采用旋转式设置。本发明中一种用于轮胎搬运的稳定、安全型机械手,通过机械手对轮胎进行搬运,很好的解决了当前人工搬运的工作量大的问题,同时本申请中所述机械手呈对称式设置,不仅能够同时搬运多个轮胎,同时还能够保
一种气囊式轮胎搬运机械手.pdf
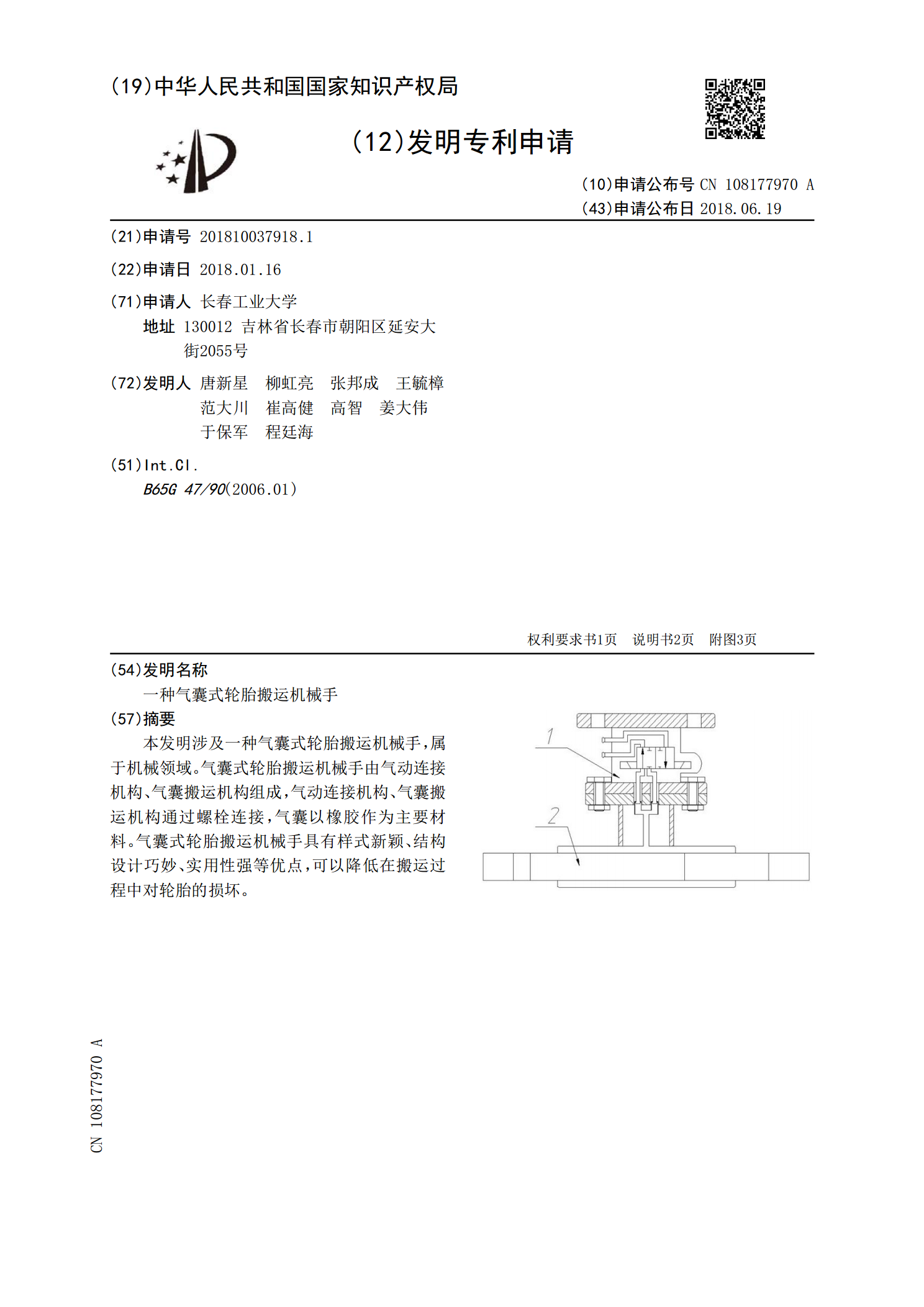
本发明涉及一种气囊式轮胎搬运机械手,属于机械领域。气囊式轮胎搬运机械手由气动连接机构、气囊搬运机构组成,气动连接机构、气囊搬运机构通过螺栓连接,气囊以橡胶作为主要材料。气囊式轮胎搬运机械手具有样式新颖、结构设计巧妙、实用性强等优点,可以降低在搬运过程中对轮胎的损坏。
一种用于搬运轮胎模具的搬运装置.pdf
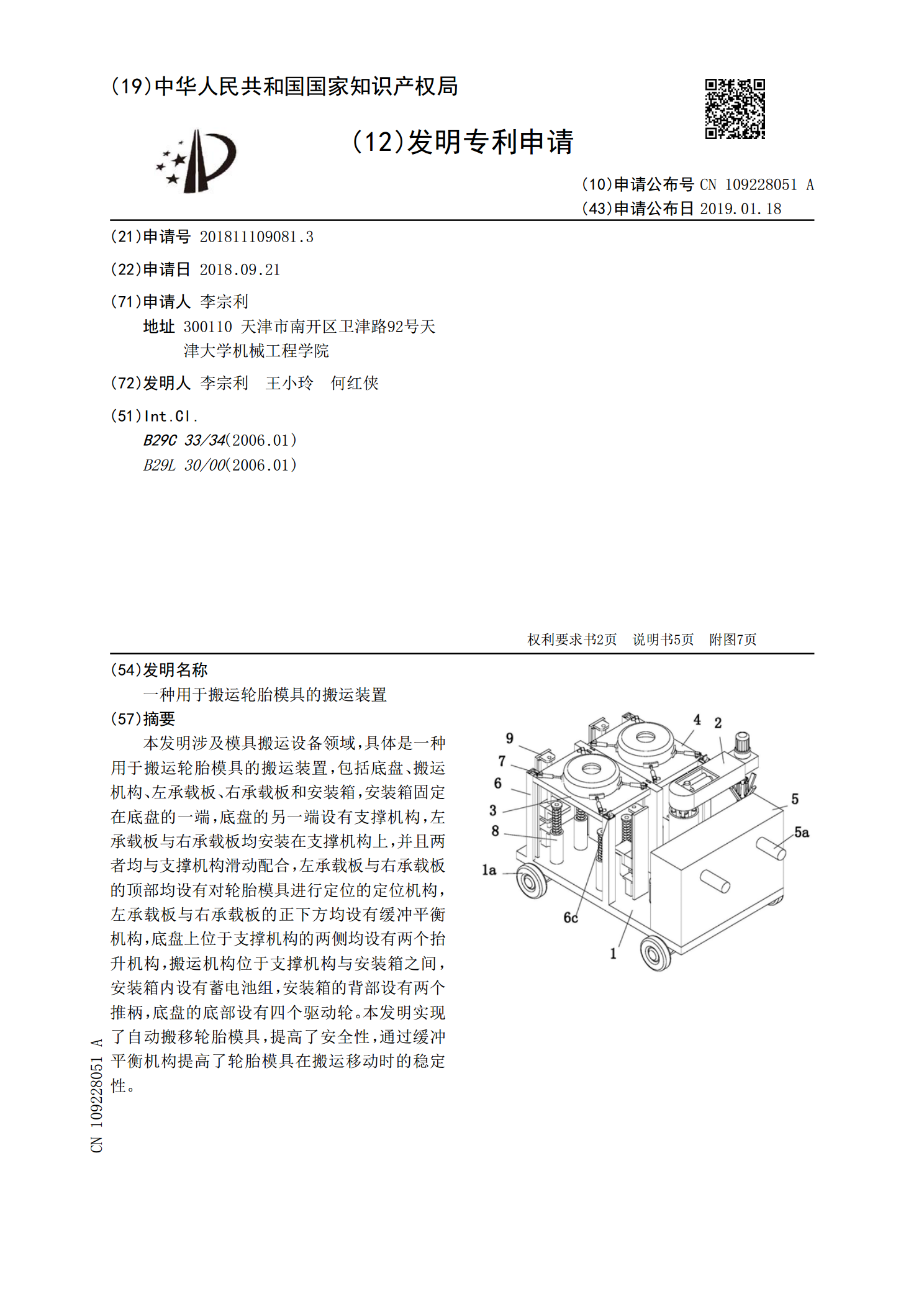
本发明涉及模具搬运设备领域,具体是一种用于搬运轮胎模具的搬运装置,包括底盘、搬运机构、左承载板、右承载板和安装箱,安装箱固定在底盘的一端,底盘的另一端设有支撑机构,左承载板与右承载板均安装在支撑机构上,并且两者均与支撑机构滑动配合,左承载板与右承载板的顶部均设有对轮胎模具进行定位的定位机构,左承载板与右承载板的正下方均设有缓冲平衡机构,底盘上位于支撑机构的两侧均设有两个抬升机构,搬运机构位于支撑机构与安装箱之间,安装箱内设有蓄电池组,安装箱的背部设有两个推柄,底盘的底部设有四个驱动轮。本发明实现了自动搬移

一种用于玻璃搬运的机械手.pdf
本发明公开了一种用于玻璃搬运的机械手,包括:基座、立柱、机械臂、机械手和承托架,立柱设于基座上,机械臂安装于立柱上,机械手安装于机械臂上,承托架安装于立柱上,并与机械手相配合,基座的下方设有滑轮,机械手上设有用于检测玻璃尺寸的尺寸检测装置;承托架中设有横向连接杆、托架和玻璃位置检测装置,横向连接杆采用电动伸缩式连接杆,其安装于立柱上连接,托架安装于横向连接杆的端部,玻璃位置检测装置安装于托架上。本发明在机械手上设置玻璃位置检测装置让其对玻璃的位置进行检测,机械手根据位置对玻璃进行抓取,通过承托架对抓取的玻