
定位精度高的工程板材承压检测系统.pdf

绮兰****文章

1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
定位精度高的工程板材承压检测系统.pdf
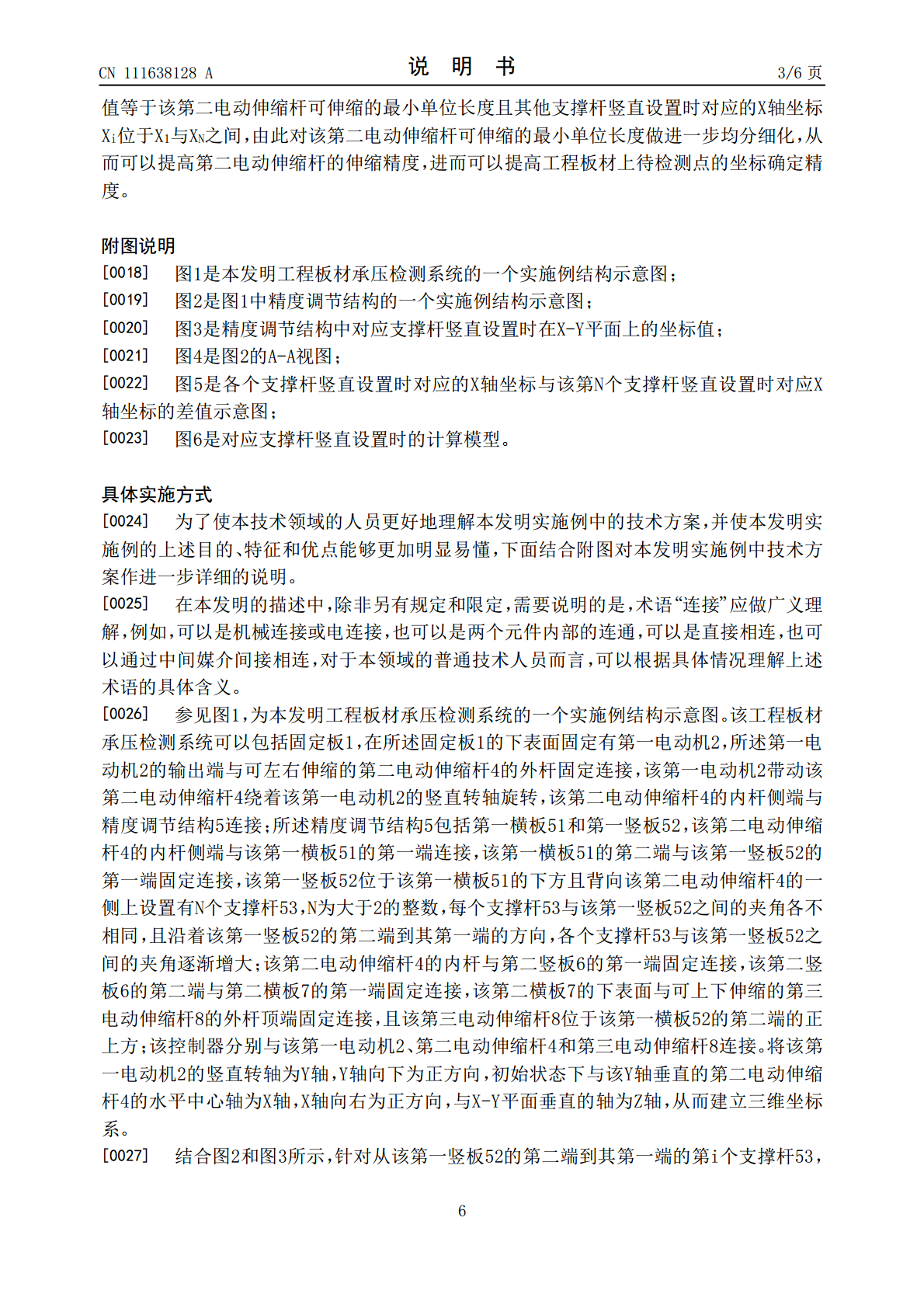
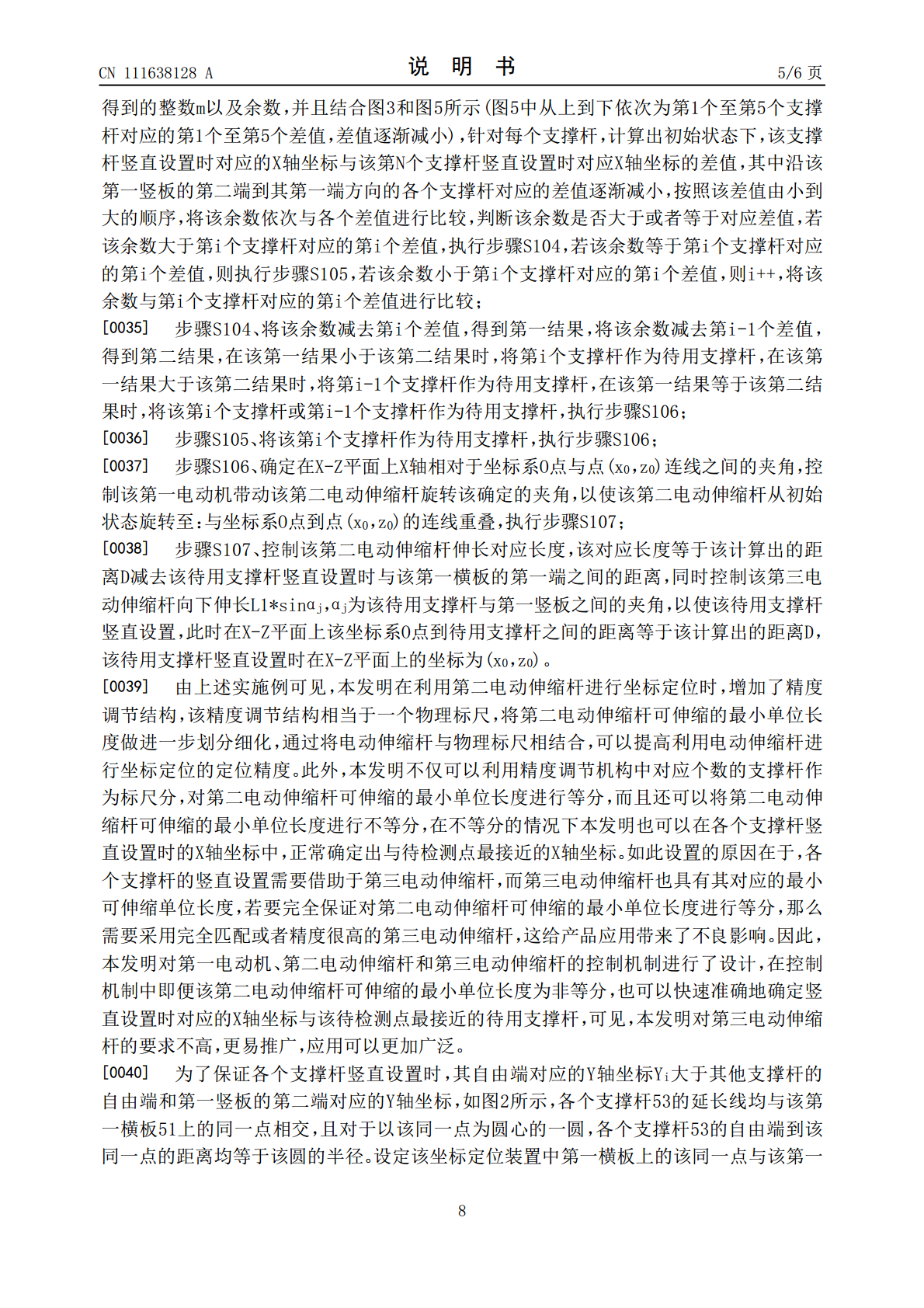
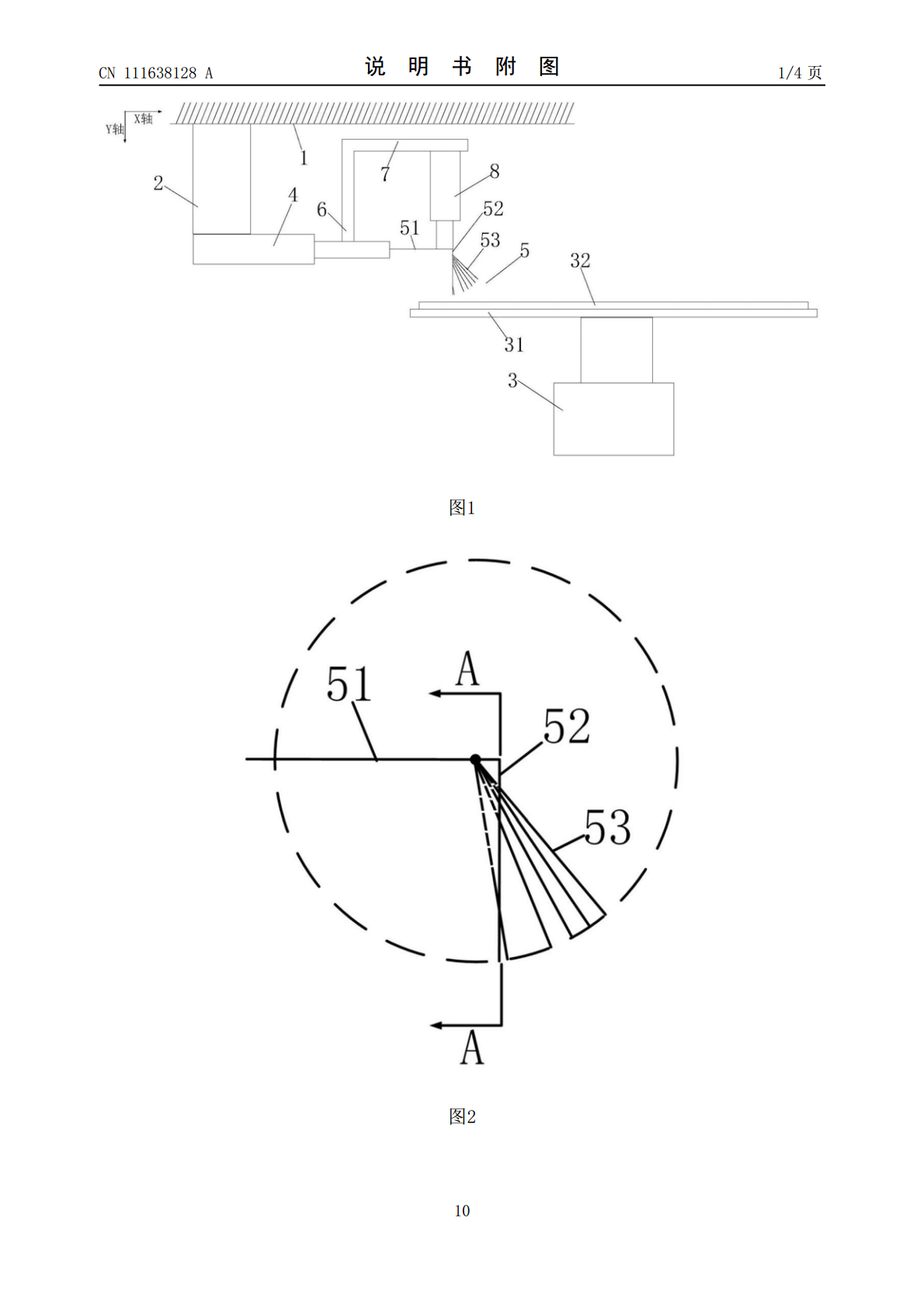
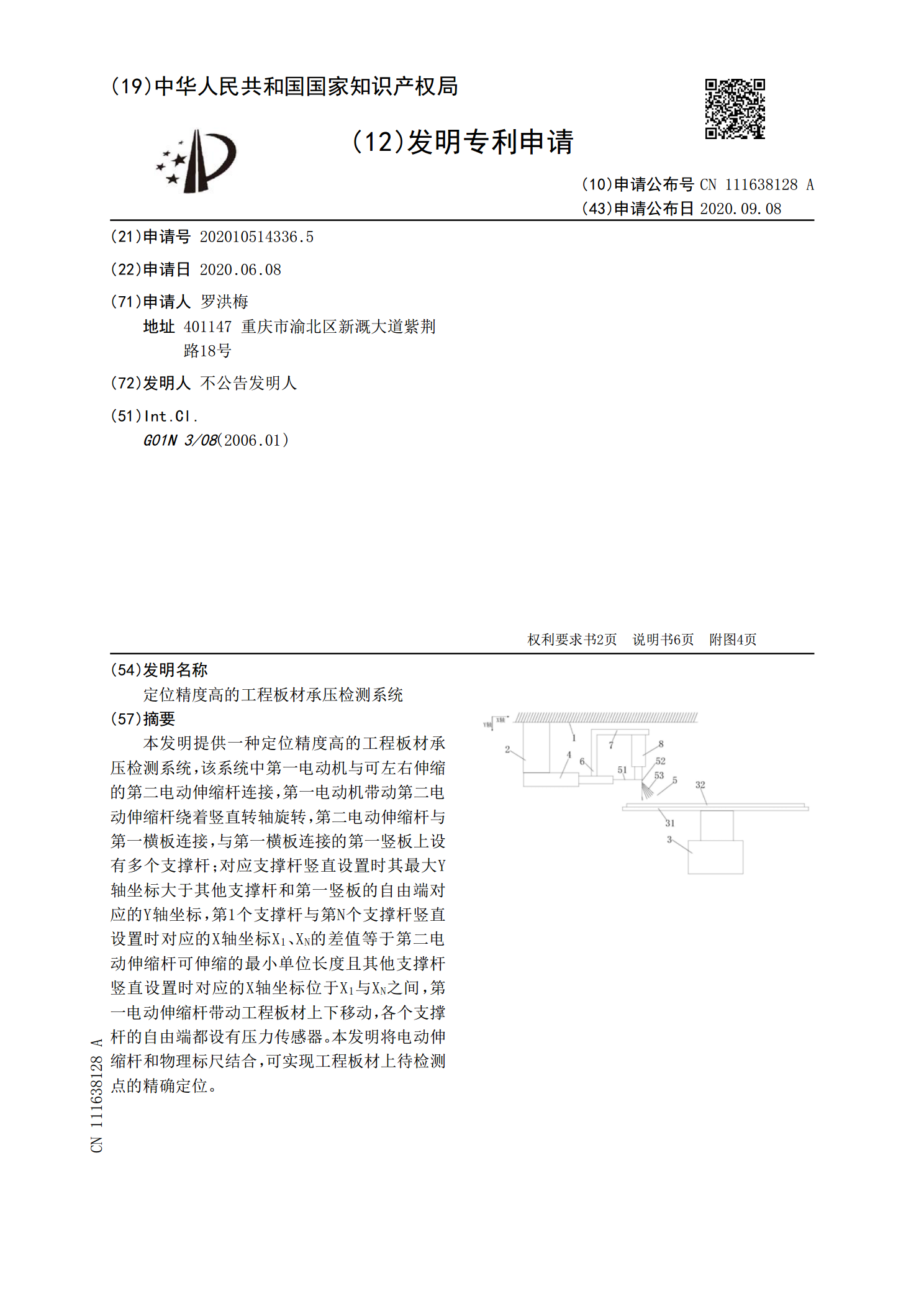
本发明提供一种定位精度高的工程板材承压检测系统,该系统中第一电动机与可左右伸缩的第二电动伸缩杆连接,第一电动机带动第二电动伸缩杆绕着竖直转轴旋转,第二电动伸缩杆与第一横板连接,与第一横板连接的第一竖板上设有多个支撑杆;对应支撑杆竖直设置时其最大Y轴坐标大于其他支撑杆和第一竖板的自由端对应的Y轴坐标,第1个支撑杆与第N个支撑杆竖直设置时对应的X轴坐标X

工程板材承压检测用坐标定位装置及定位方法.pdf
本发明提供一种工程板材承压检测用坐标定位装置及定位方法,坐标定位装置包括第一电动机,第一电动机与可左右伸缩的第二电动伸缩杆连接,第一电动机带动第二电动伸缩杆绕着竖直转轴旋转,第二电动伸缩杆与第一横板连接,第一横板与第一竖板连接,第一竖板背向第二电动伸缩杆的一侧上设置有多个支撑杆;第i个支撑杆竖直设置时其自由端的Y轴坐标大于其他支撑杆和第一竖板的自由端对应的Y轴坐标,第1个支撑板竖直设置时与第N个支撑板竖直设置时对应的X轴坐标X

工程板材承压检测装置.pdf
本发明提供一种工程板材承压检测装置,包括第一电动机,第一电动机与可上下伸缩的第一电动伸缩杆连接,第一电动伸缩杆与可左右伸缩的第二电动伸缩杆连接,第一电动机带动第二电动伸缩杆绕着竖直转轴旋转,第二电动伸缩杆与第一横板连接,第一横板与第一竖板连接,第一竖板背向第二电动伸缩杆的一侧上设置有多个支撑杆;第i个支撑杆竖直设置时其自由端的Y轴坐标大于其他支撑杆和第一竖板的自由端对应的Y轴坐标,第1个支撑板竖直设置时与第N个支撑板竖直设置时对应的X轴坐标X
一种板材生产压合设备的板材定位装置及定位方法.pdf
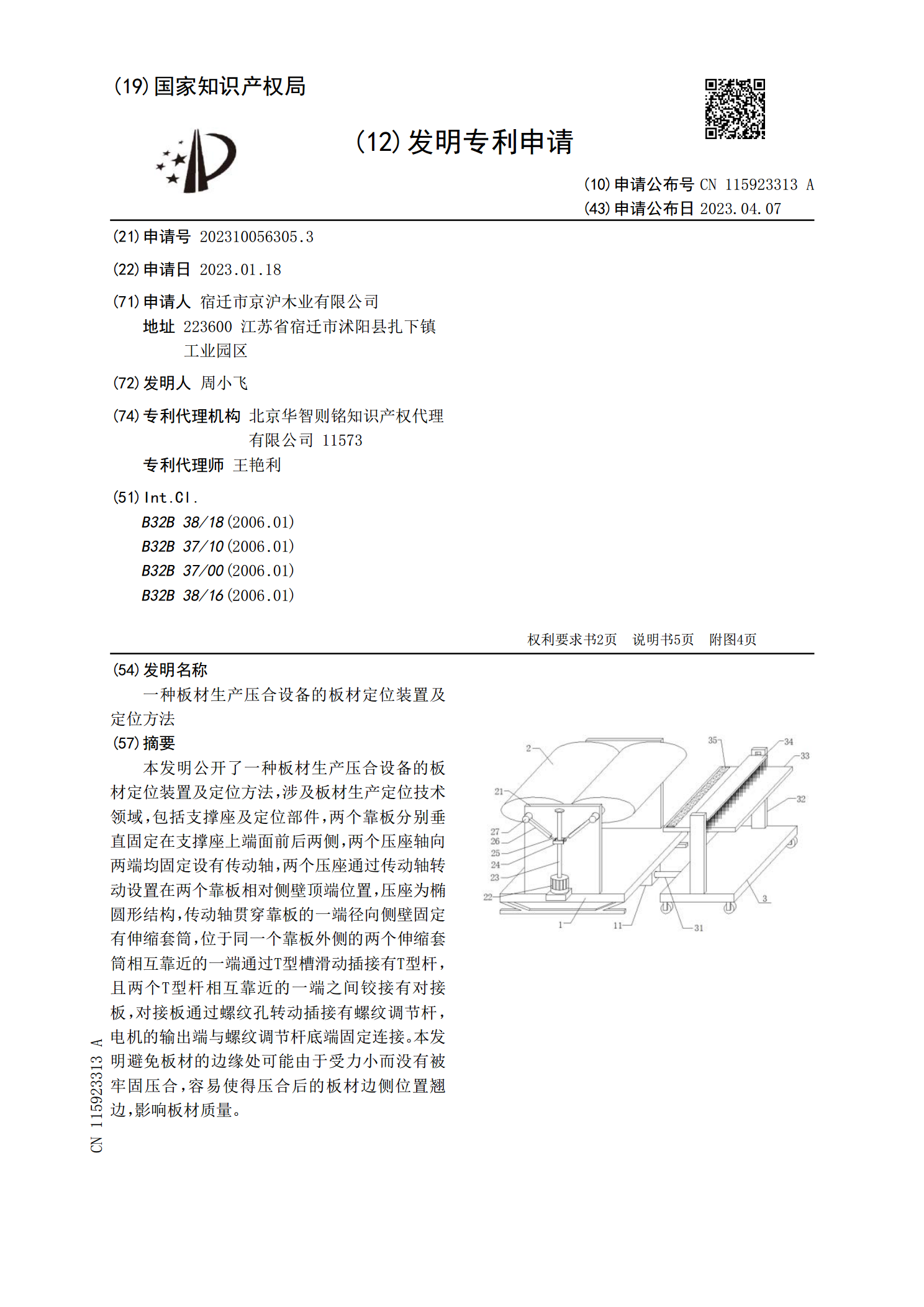
本发明公开了一种板材生产压合设备的板材定位装置及定位方法,涉及板材生产定位技术领域,包括支撑座及定位部件,两个靠板分别垂直固定在支撑座上端面前后两侧,两个压座轴向两端均固定设有传动轴,两个压座通过传动轴转动设置在两个靠板相对侧壁顶端位置,压座为椭圆形结构,传动轴贯穿靠板的一端径向侧壁固定有伸缩套筒,位于同一个靠板外侧的两个伸缩套筒相互靠近的一端通过T型槽滑动插接有T型杆,且两个T型杆相互靠近的一端之间铰接有对接板,对接板通过螺纹孔转动插接有螺纹调节杆,电机的输出端与螺纹调节杆底端固定连接。本发明避免板材的

锅炉承压管线泄漏检测系统.pdf
本发明提供一种锅炉承压管线泄漏检测系统,包括数字化音频信号采集器和主控单元;数字化音频信号采集器包括声音信号采集模块、滤波模块、第一微处理器和总线接口;主控单元包括与总线接口通过现场总线进行数字信号传输的现场总线通讯接口模块、与现场总线通讯接口模块连接的第二微处理器、分别与第二微处理器连接的音频信号转换电路、报警模块、通信接口模块和与通信接口模块通过串口通讯连接的工控机;音频信号转换电路通过音频信号交换控制模块与数字化音频信号采集器的模拟信号连接。利用本发明能够解决现有技术中报警不及时、传输线路复杂、成本