
一种高速双位置双轴抓取码放装置.pdf

是浩****32

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种高速双位置双轴抓取码放装置.pdf
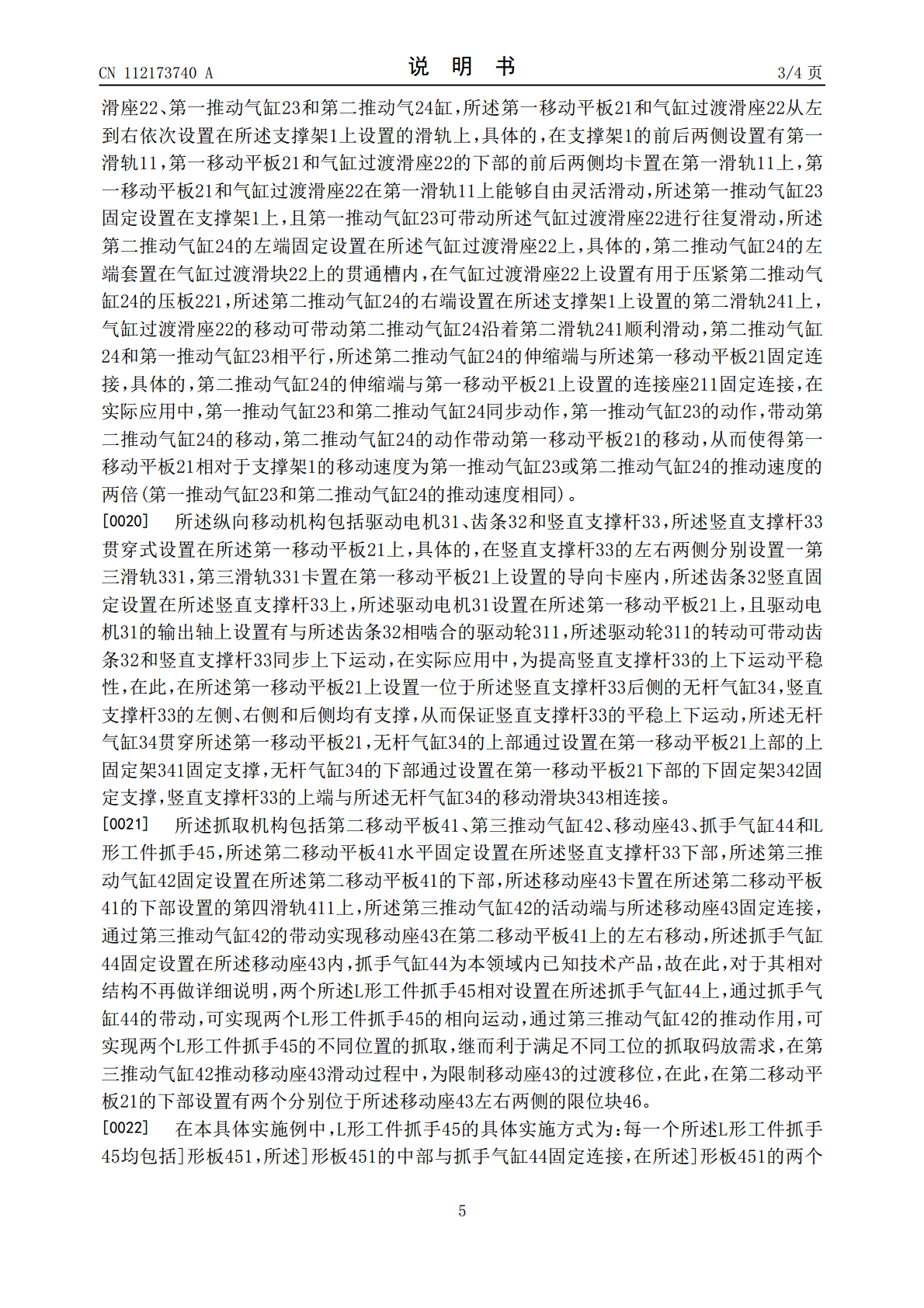
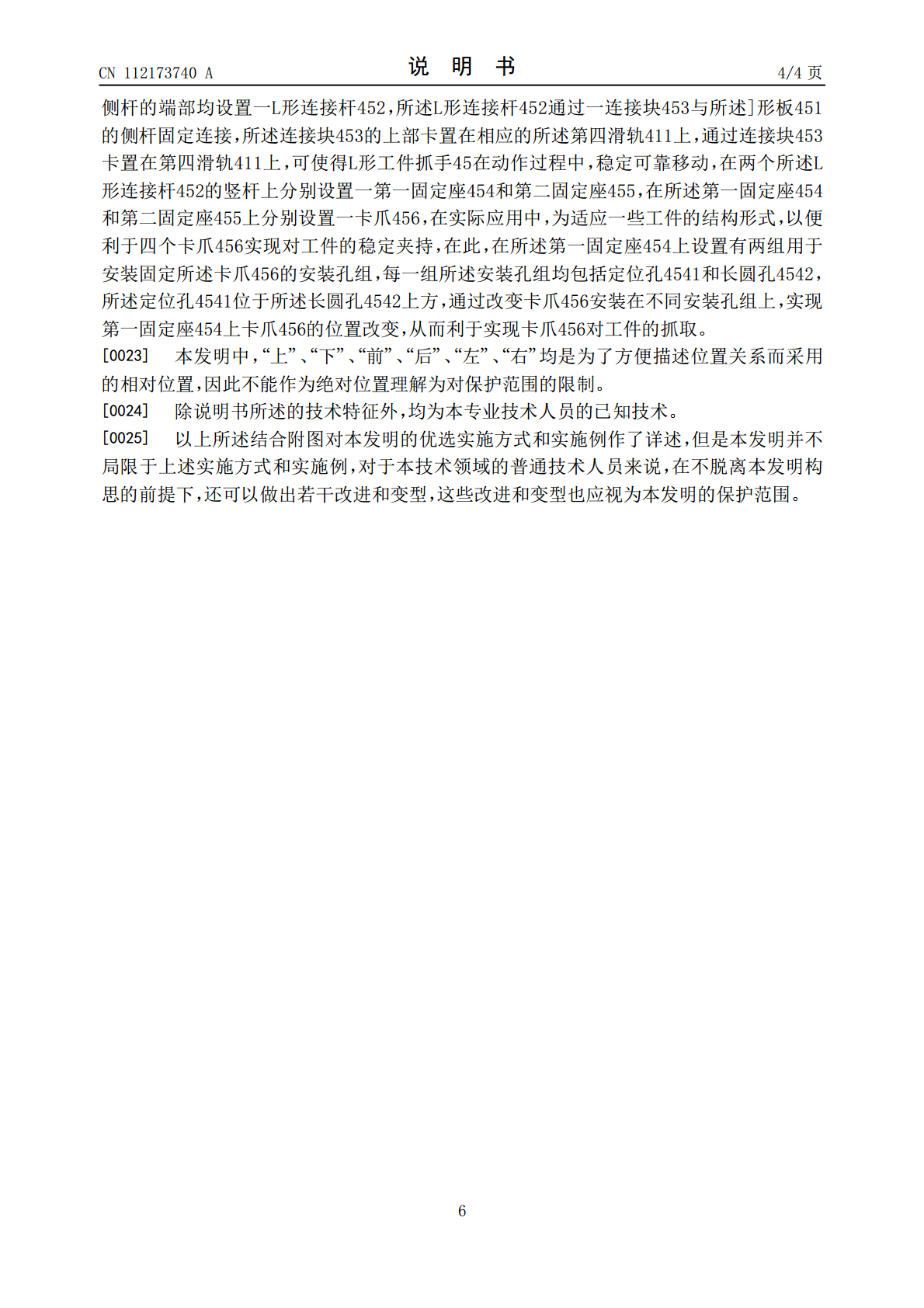
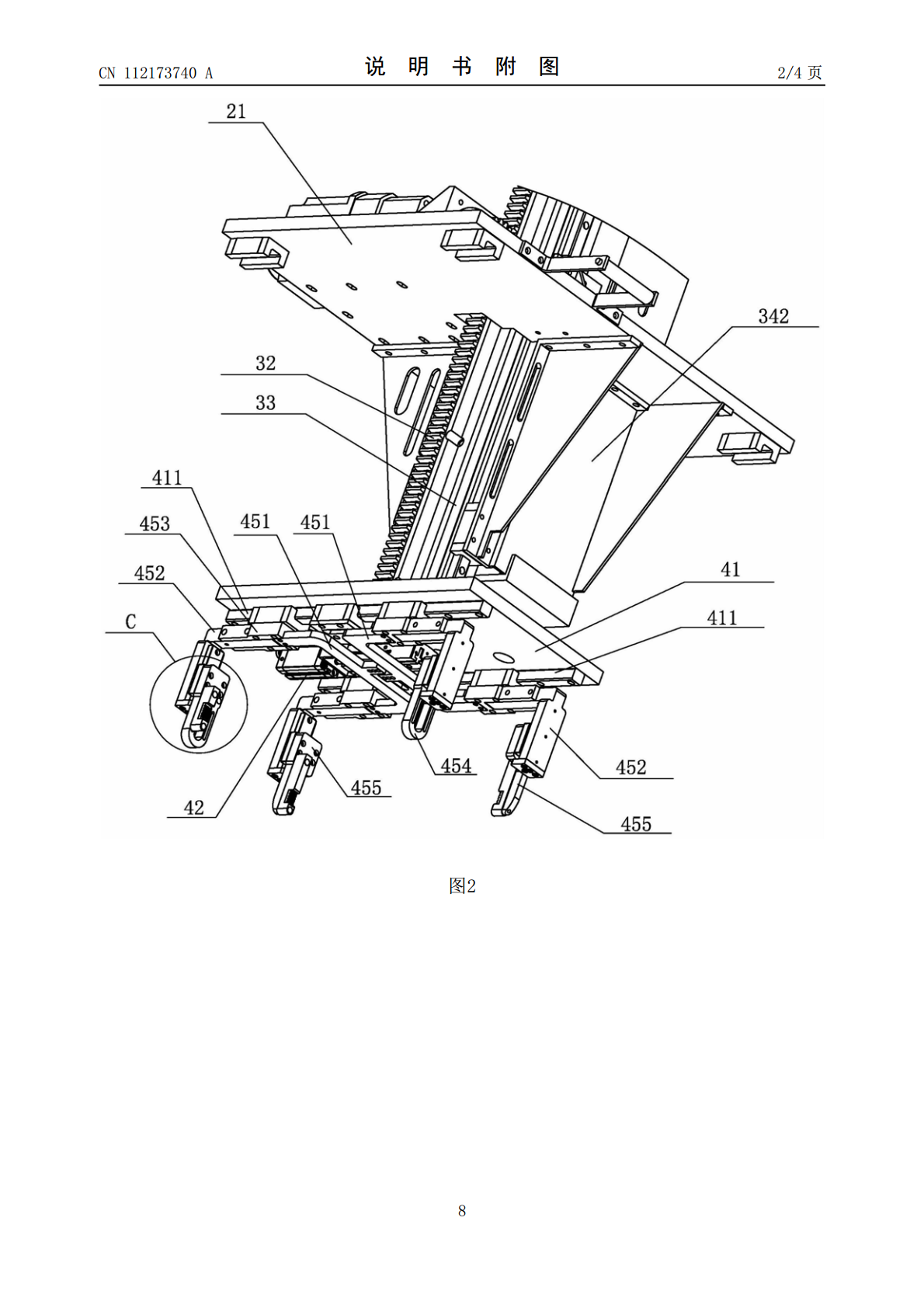
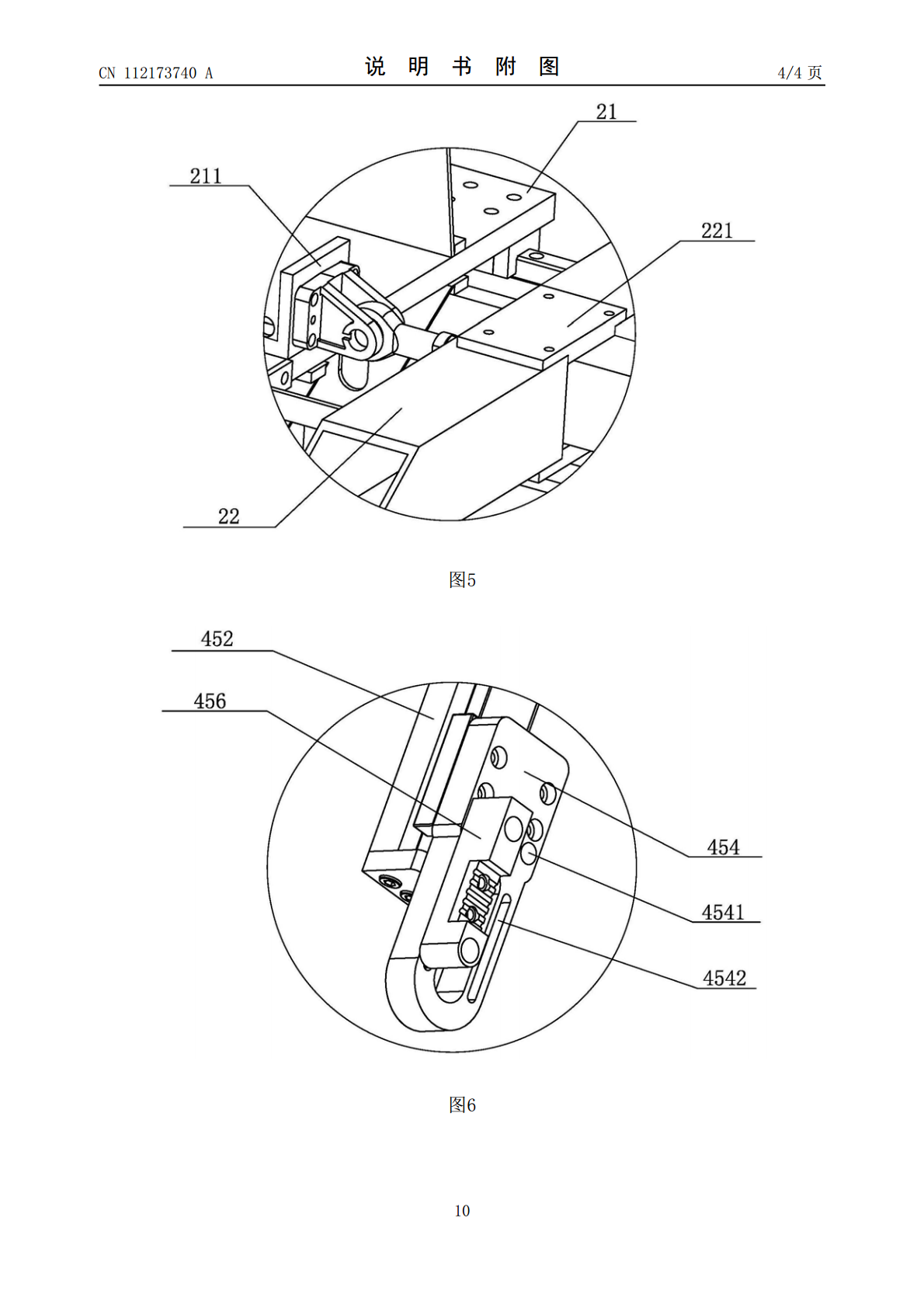
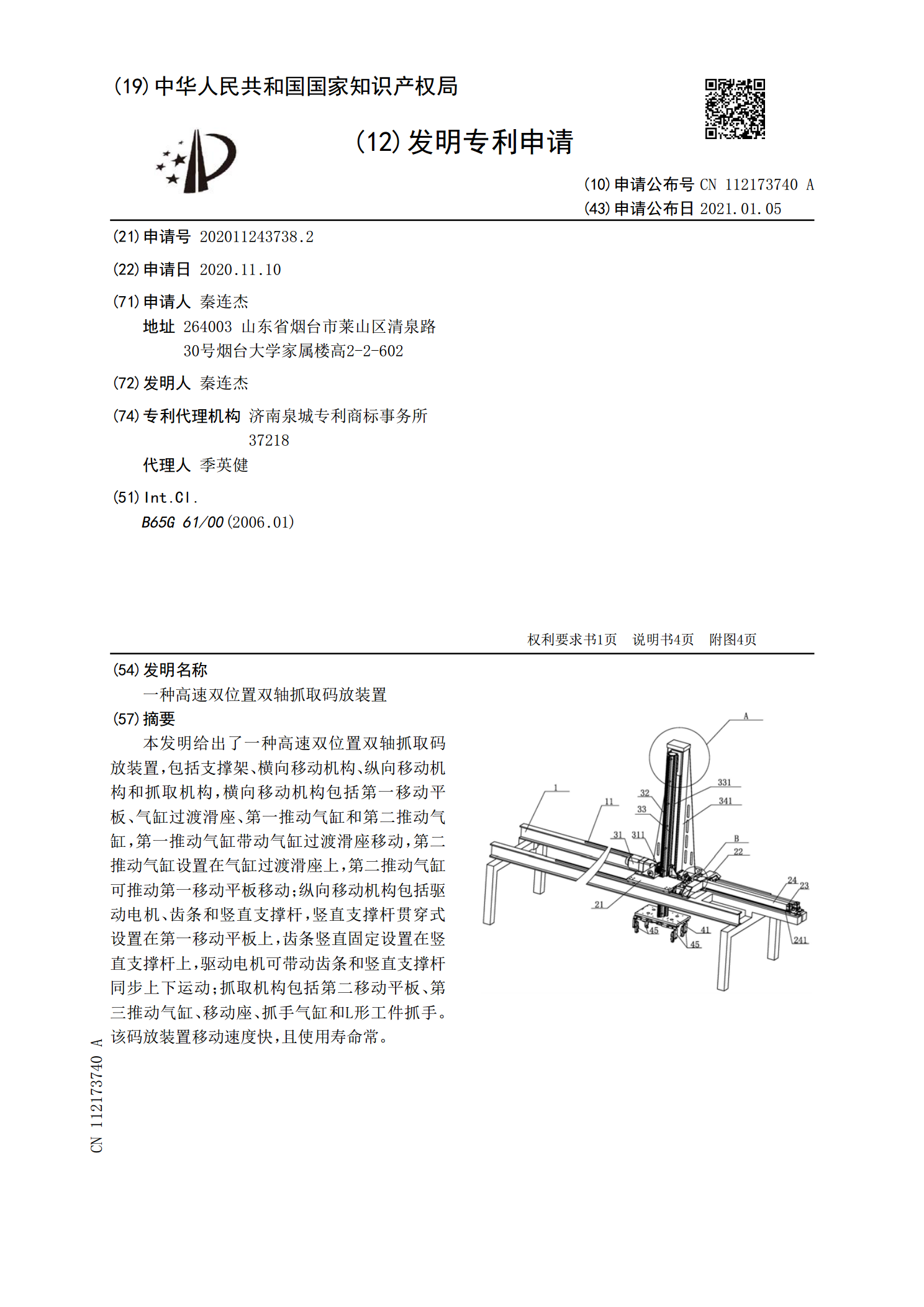
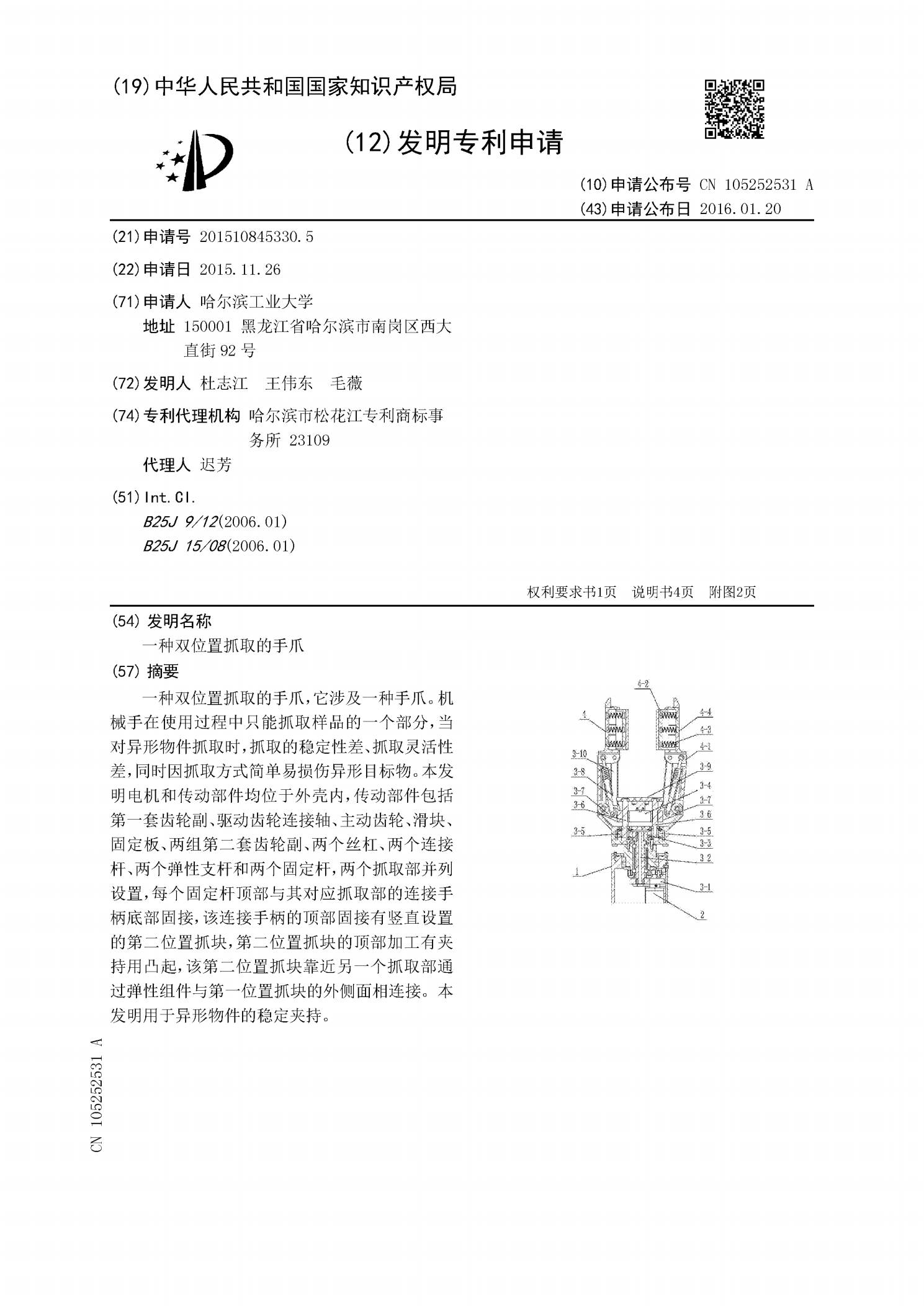
本发明给出了一种高速双位置双轴抓取码放装置,包括支撑架、横向移动机构、纵向移动机构和抓取机构,横向移动机构包括第一移动平板、气缸过渡滑座、第一推动气缸和第二推动气缸,第一推动气缸带动气缸过渡滑座移动,第二推动气缸设置在气缸过渡滑座上,第二推动气缸可推动第一移动平板移动;纵向移动机构包括驱动电机、齿条和竖直支撑杆,竖直支撑杆贯穿式设置在第一移动平板上,齿条竖直固定设置在竖直支撑杆上,驱动电机可带动齿条和竖直支撑杆同步上下运动;抓取机构包括第二移动平板、第三推动气缸、移动座、抓手气缸和L形工件抓手。该码放装置
一种双位置抓取的手爪.pdf
一种双位置抓取的手爪,它涉及一种手爪。机械手在使用过程中只能抓取样品的一个部分,当对异形物件抓取时,抓取的稳定性差、抓取灵活性差,同时因抓取方式简单易损伤异形目标物。本发明电机和传动部件均位于外壳内,传动部件包括第一套齿轮副、驱动齿轮连接轴、主动齿轮、滑块、固定板、两组第二套齿轮副、两个丝杠、两个连接杆、两个弹性支杆和两个固定杆,两个抓取部并列设置,每个固定杆顶部与其对应抓取部的连接手柄底部固接,该连接手柄的顶部固接有竖直设置的第二位置抓块,第二位置抓块的顶部加工有夹持用凸起,该第二位置抓块靠近另一个抓取
单触杆双轴位置探测装置.pdf
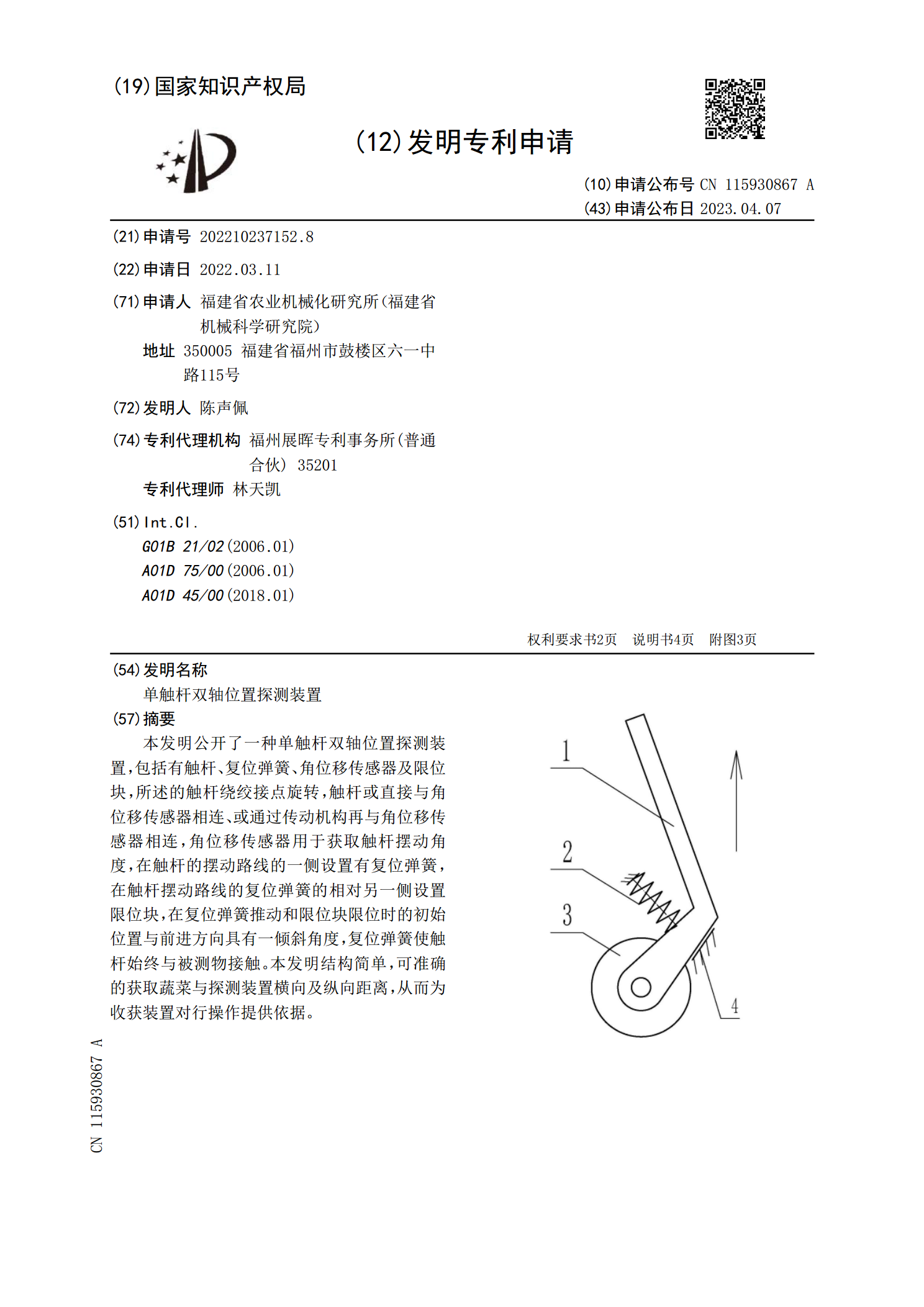
本发明公开了一种单触杆双轴位置探测装置,包括有触杆、复位弹簧、角位移传感器及限位块,所述的触杆绕绞接点旋转,触杆或直接与角位移传感器相连、或通过传动机构再与角位移传感器相连,角位移传感器用于获取触杆摆动角度,在触杆的摆动路线的一侧设置有复位弹簧,在触杆摆动路线的复位弹簧的相对另一侧设置限位块,在复位弹簧推动和限位块限位时的初始位置与前进方向具有一倾斜角度,复位弹簧使触杆始终与被测物接触。本发明结构简单,可准确的获取蔬菜与探测装置横向及纵向距离,从而为收获装置对行操作提供依据。
一种双轴跟踪装置.pdf
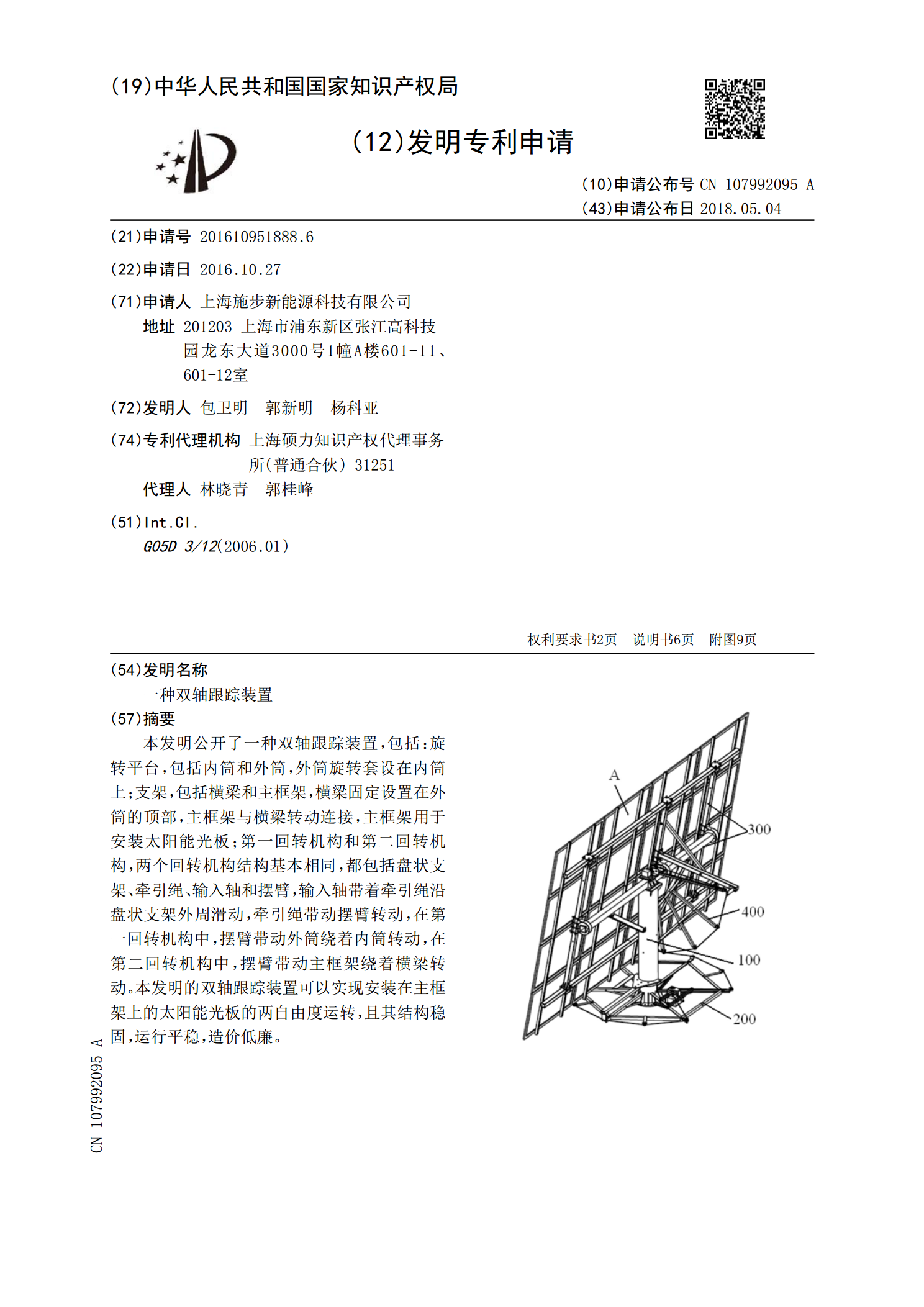
本发明公开了一种双轴跟踪装置,包括:旋转平台,包括内筒和外筒,外筒旋转套设在内筒上;支架,包括横梁和主框架,横梁固定设置在外筒的顶部,主框架与横梁转动连接,主框架用于安装太阳能光板;第一回转机构和第二回转机构,两个回转机构结构基本相同,都包括盘状支架、牵引绳、输入轴和摆臂,输入轴带着牵引绳沿盘状支架外周滑动,牵引绳带动摆臂转动,在第一回转机构中,摆臂带动外筒绕着内筒转动,在第二回转机构中,摆臂带动主框架绕着横梁转动。本发明的双轴跟踪装置可以实现安装在主框架上的太阳能光板的两自由度运转,且其结构稳固,运行平

分轴式双电机协同复合抓取机器人手指装置.pdf
分轴式双电机协同复合抓取机器人手指装置,属于机器人手技术领域,包括基座、两个电机及减速器、中部指段、末端指段、近关节轴、远关节轴、两个单向传动机构、主动轮、从动轮、传动件和簧件等。该装置采用分散存放的两个电机、两个单向传动机构、主动轮、从动轮、传动件、活动套接的中部指段和簧件等综合实现了先耦合抓取与后自适应抓取相结合的复合欠驱动抓取模式;各运动形式之间没有过多干涉,耦合运动时簧件变形小,手指可以自然停留在耦合运动的任一中间位置,能耗小;两个电机分别存放在基座和中部指段空间;两个电机协同作用于两个关节,使得