
一种基于人工智能的机器人分拣设备.pdf

Ro****44


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于人工智能的机器人分拣设备.pdf
本发明提供一种基于人工智能的机器人分拣设备,属于抓取技术领域,该基于人工智能的机器人分拣设备,包括底板,底板的下侧固设有固定机构,底板的上侧自下而上依次设有转向机构、角度调节机构和抓取机构,底板的上端固定连接有箱体,箱体的上端滑动连接有转向块,且转向块活动贯穿于箱体的上内壁并向下延伸,角度调节机构包括U型框、第一驱动杆、第二驱动杆、第一转轴、第一支撑杆、第二转轴、第二支撑杆、角栓、伸缩杆、第三转轴、第二电机、第三电机和三角连接块,U型框固定连接于转向块的上端;旨在解决现有技术中的零部件不易更换的问题。
基于人工智能的分拣流水线机器人.pdf
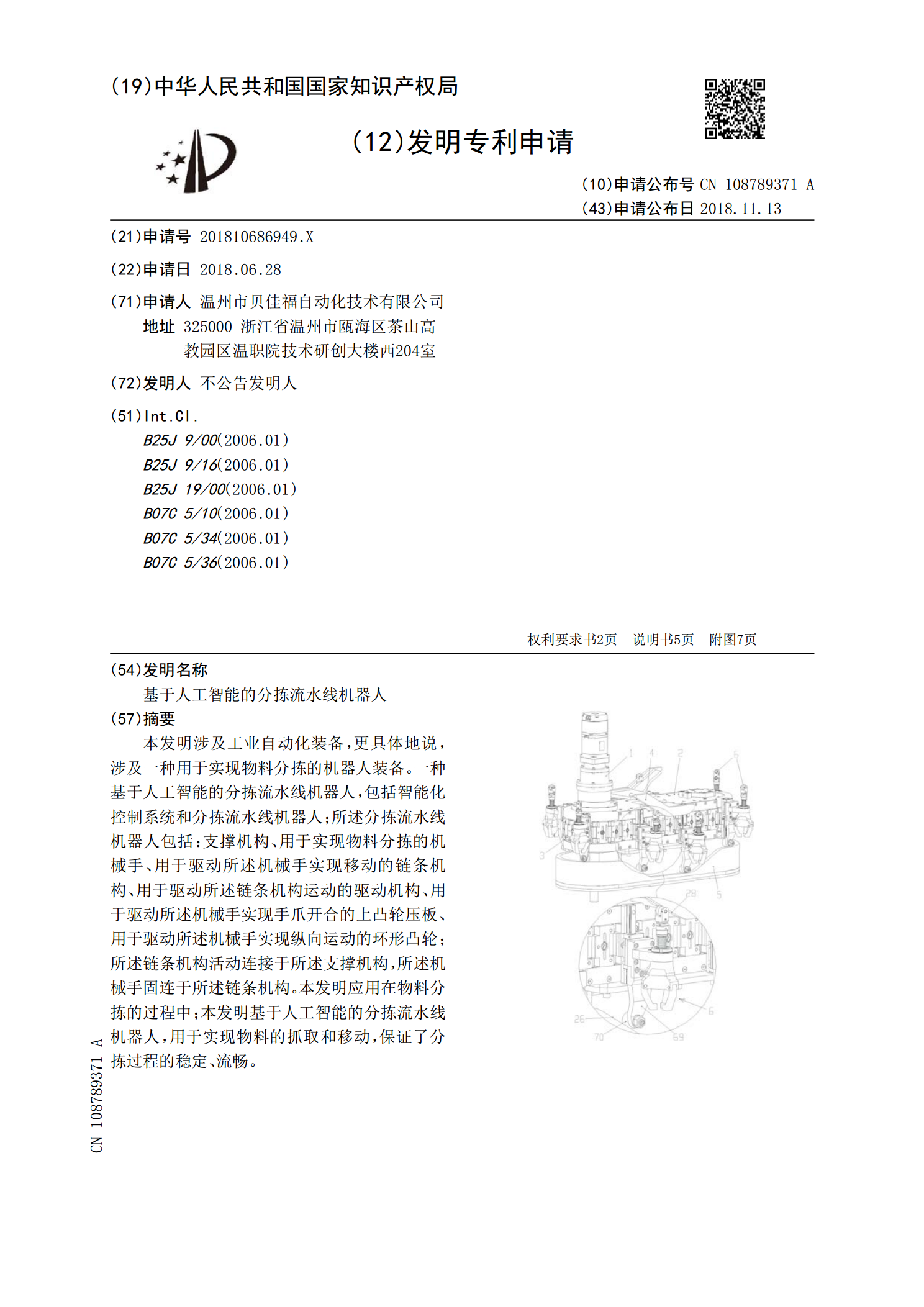
本发明涉及工业自动化装备,更具体地说,涉及一种用于实现物料分拣的机器人装备。一种基于人工智能的分拣流水线机器人,包括智能化控制系统和分拣流水线机器人;所述分拣流水线机器人包括:支撑机构、用于实现物料分拣的机械手、用于驱动所述机械手实现移动的链条机构、用于驱动所述链条机构运动的驱动机构、用于驱动所述机械手实现手爪开合的上凸轮压板、用于驱动所述机械手实现纵向运动的环形凸轮;所述链条机构活动连接于所述支撑机构,所述机械手固连于所述链条机构。本发明应用在物料分拣的过程中;本发明基于人工智能的分拣流水线机器人,用于

一种基于人工智能的快递分拣装置.pdf
本发明公开了物流分拣技术领域的一种基于人工智能的快递分拣装置,包括底座,底座的内部设置有双向螺纹杆,双向螺纹杆的杆体均匀螺接有螺纹套,螺纹套的顶部设置有固定块,固定块铰接有连杆,连杆的顶部铰接有箱体,箱体的内部开设有第一空腔,第一空腔的左端底部腔壁固定安装有电动往复导杆。本发明通过弹簧、齿轮、皮带轮、电动往复导杆、双向螺纹杆、红外条码扫描仪、传送带和皮带轮的配合,实现在对快递进行分拣时,取代人工将快递一件一件拾起进行扫描,降低了工作人员的劳动强度,且能有效避免快递因为由高处摔落导致盒体损坏,而导致收件人验
一种基于人工智能的物流分拣机械爪.pdf
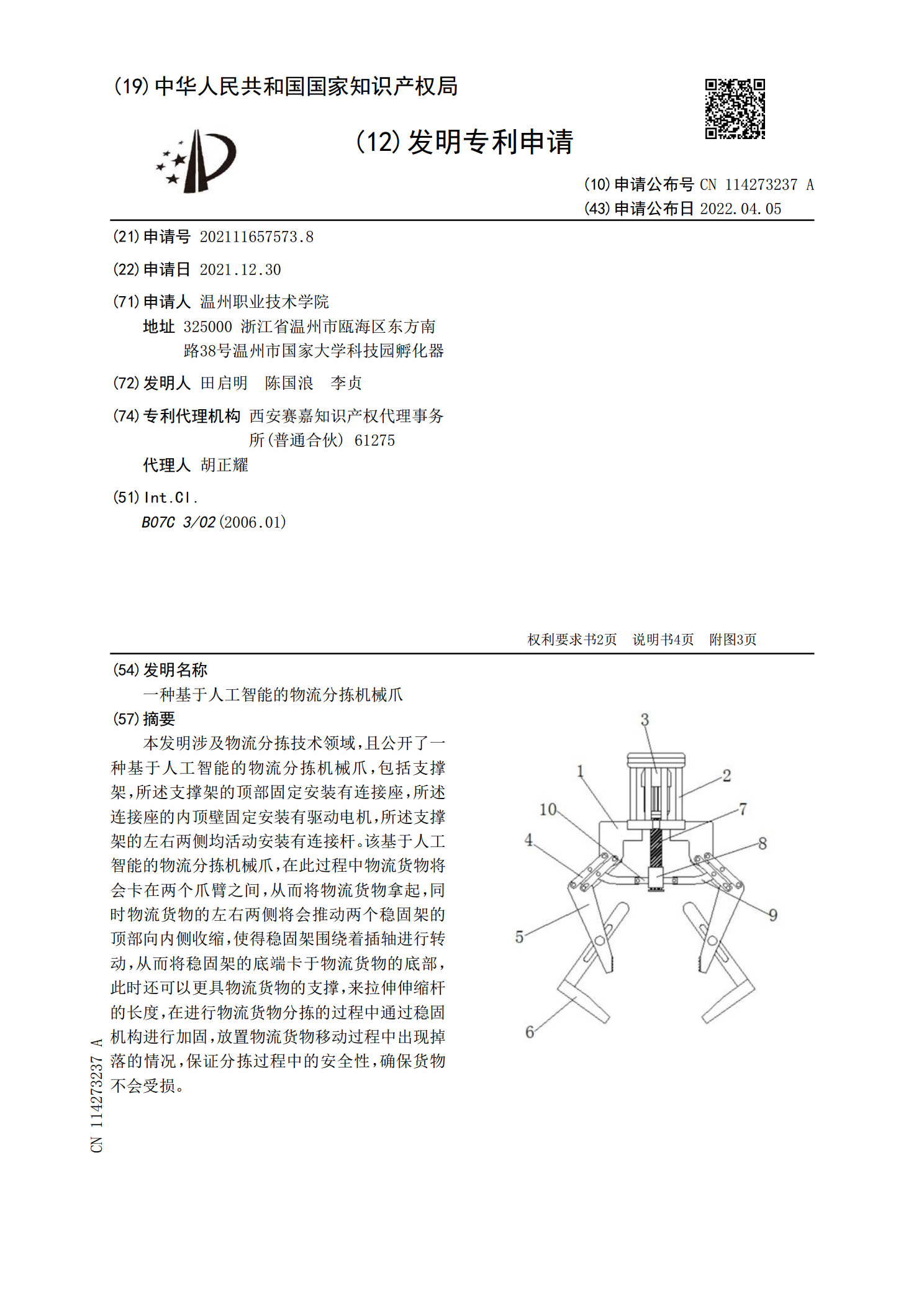
本发明涉及物流分拣技术领域,且公开了一种基于人工智能的物流分拣机械爪,包括支撑架,所述支撑架的顶部固定安装有连接座,所述连接座的内顶壁固定安装有驱动电机,所述支撑架的左右两侧均活动安装有连接杆。该基于人工智能的物流分拣机械爪,在此过程中物流货物将会卡在两个爪臂之间,从而将物流货物拿起,同时物流货物的左右两侧将会推动两个稳固架的顶部向内侧收缩,使得稳固架围绕着插轴进行转动,从而将稳固架的底端卡于物流货物的底部,此时还可以更具物流货物的支撑,来拉伸伸缩杆的长度,在进行物流货物分拣的过程中通过稳固机构进行加固,

带人工智能的物流分拣机器人.pdf
本发明涉及工业自动化装备,更具体地说,涉及一种用于实现物料分拣的机器人装备。一种带人工智能的物流分拣机器人,包括智能化控制系统和分拣流水线机器人;所述分拣流水线机器人包括:支撑机构、用于实现物料分拣的机械手、用于驱动所述机械手实现移动的链条机构、用于驱动所述链条机构运动的驱动机构、用于驱动所述机械手实现手爪开合的上凸轮压板、用于驱动所述机械手实现纵向运动的环形凸轮、用于承载物料的动态轨道机构、用于将物料推向所述机械手的推料机械手机构、用于固定支撑机构、动态轨道机构和推料机械手机构的联合支架。本发明应用在物