
一种用于迎角调节的液压支撑装置.pdf

一条****涛k

1/7
2/7
3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于迎角调节的液压支撑装置.pdf
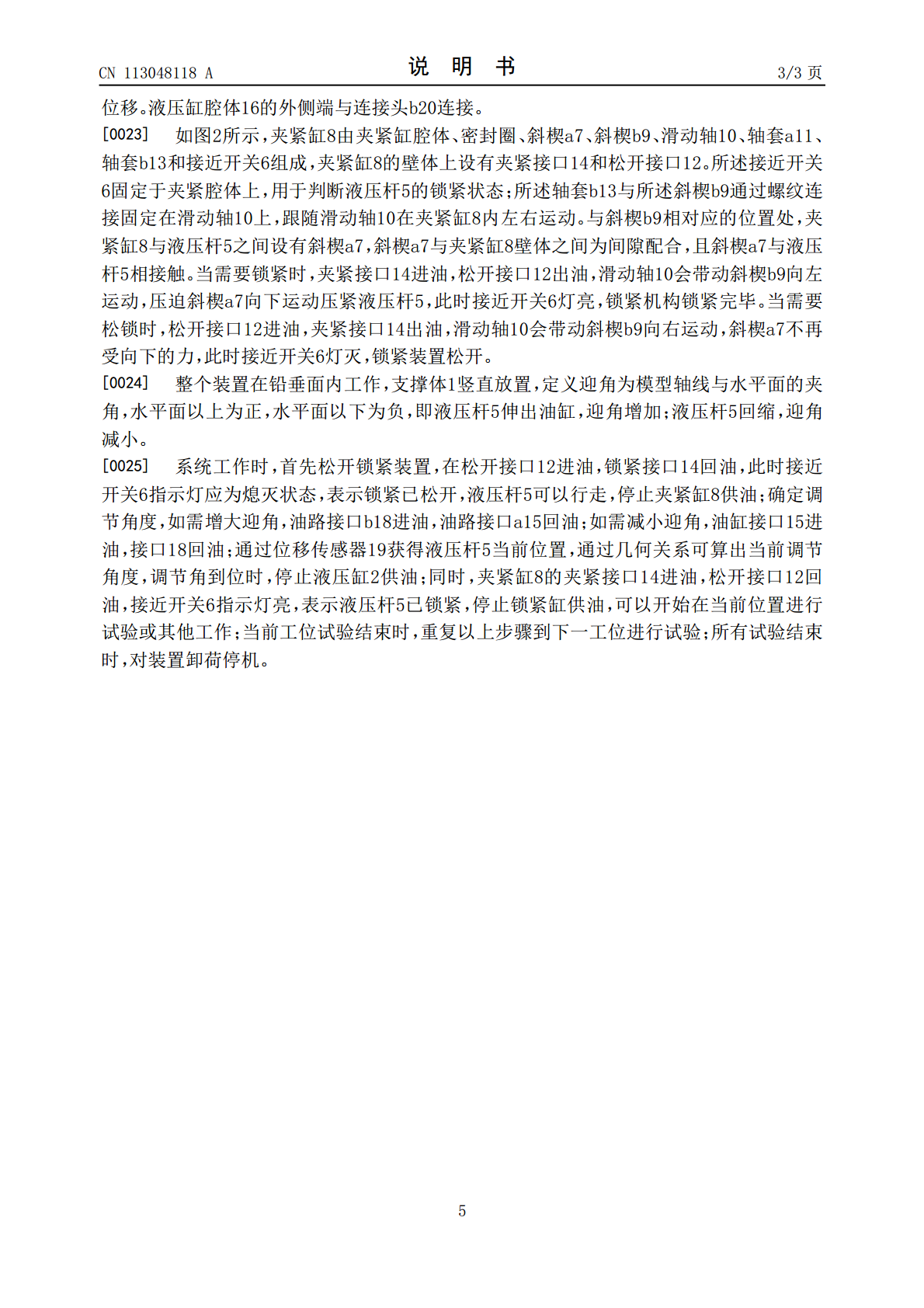
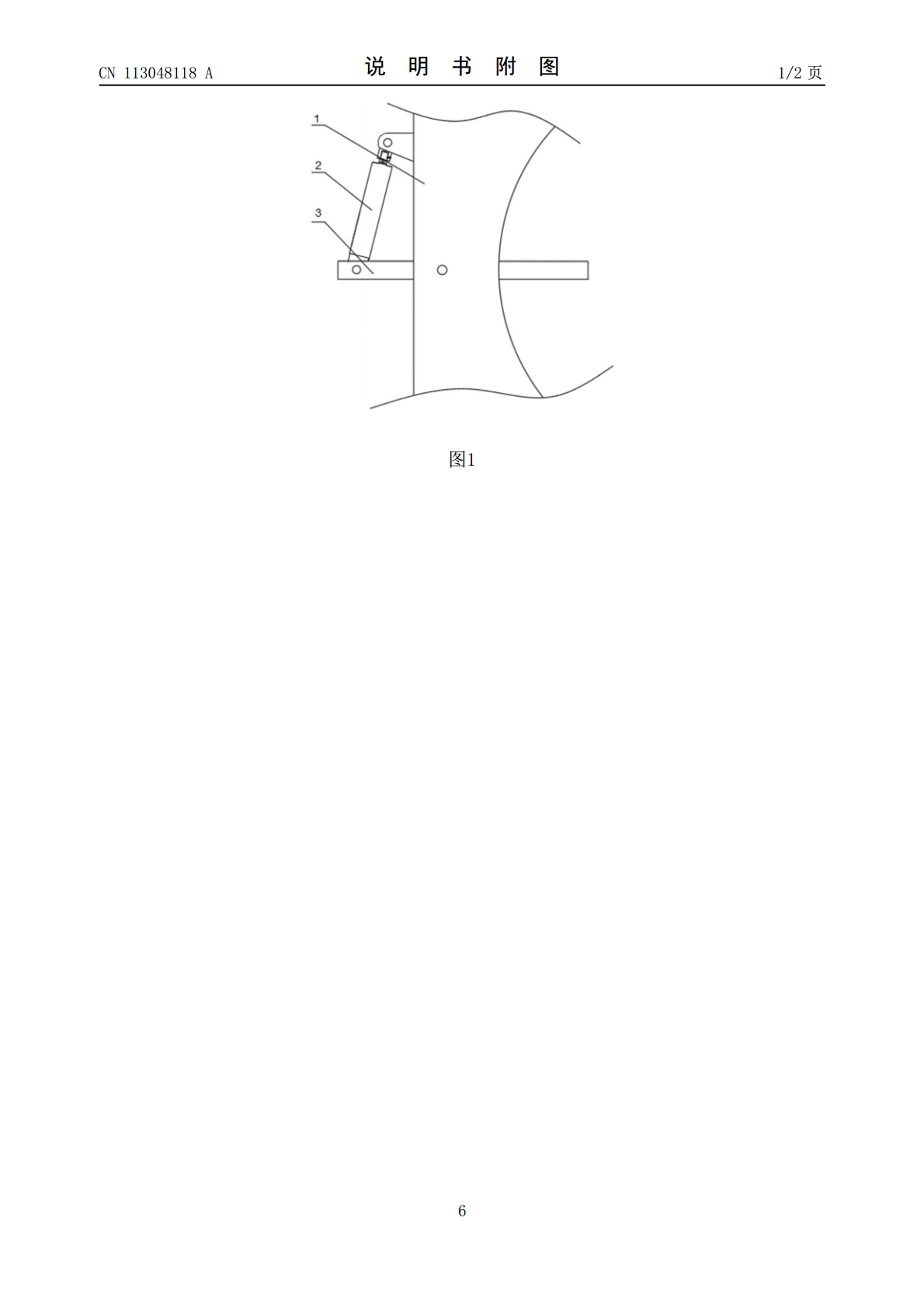
本发明属于液压装置技术领域,具体涉及一种用于迎角调节的液压支撑装置,包括支撑体、液压缸和支撑杆;支撑体用于支撑固定支撑杆和液压缸;支撑杆的中部与支撑体铰接,其一端连接液压缸中的液压杆,另一端安装待调角度目标物,利用杠杆原理进行角度调节。液压缸包括液压缸腔体、夹紧缸、液压杆、液压杆轴套和位移传感器,夹紧缸中设有锁紧装置,通过改变油路,以改变液压杆的移动方向,并通过锁紧装置进行锁紧。本发明可通过更换不同的杠杆,调节杠杆支点位置可获得较宽的调姿范围;可对现有迎角度调节机构进行迎角调节,扩大调姿范围;在定位后可通
一种用于齿轮箱的液压支撑装置.pdf
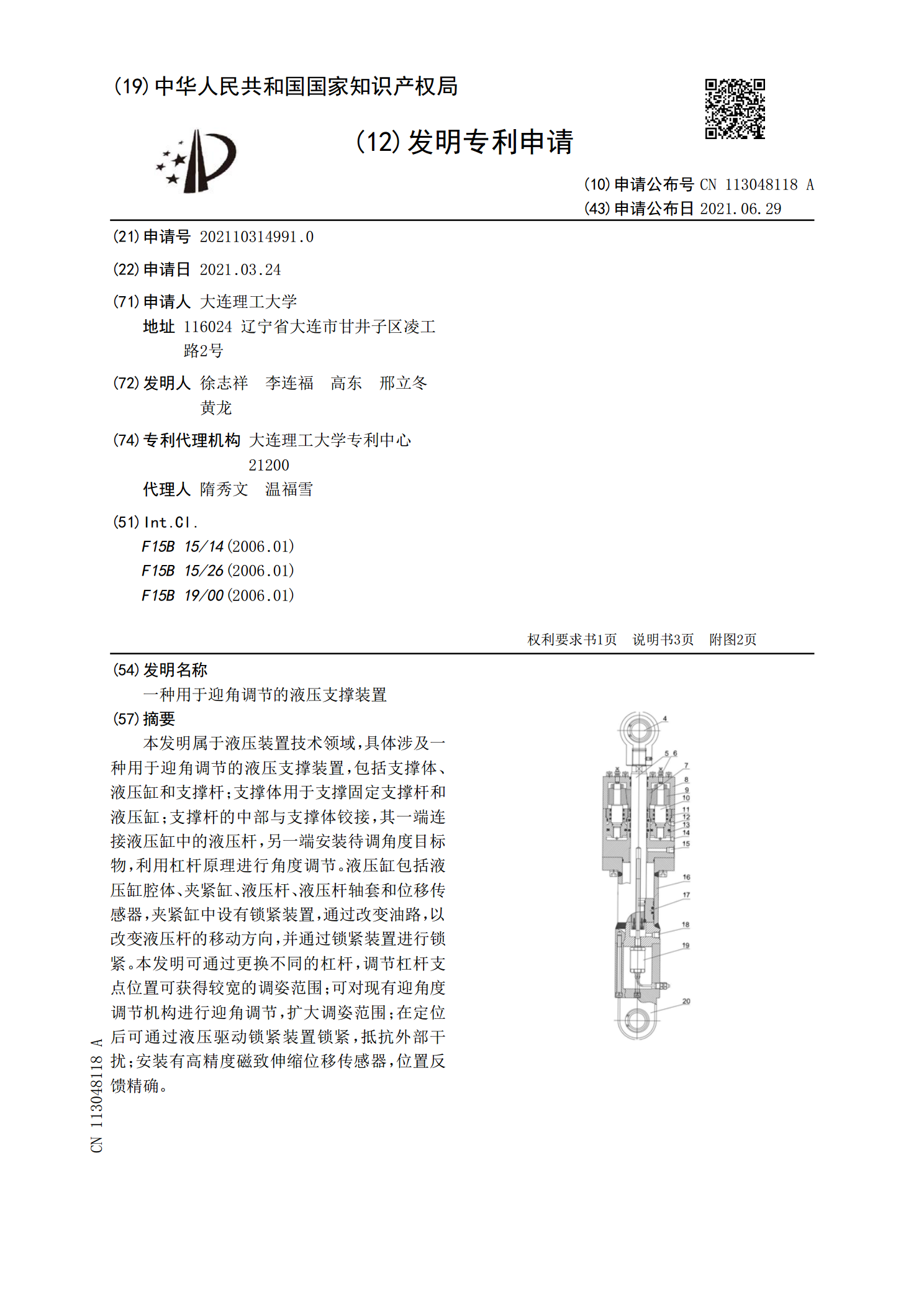
本发明涉及一种用于齿轮箱的液压支撑装置,所述液压支撑装置安装在所述齿轮箱侧面的扭转臂上,包括:具有空腔的液体复合弹簧,在所述空腔内填充有液体;设置在所述液体复合弹簧的顶部的横梁;以及穿过所述横梁而与所述液体复合弹簧接触的调整件,所述调整件构造成能对所述液体复合弹簧施加作用力,从而减小所述空腔的体积以对液体复合弹簧补充压力。
一种用于会议平板的支撑调节装置.pdf
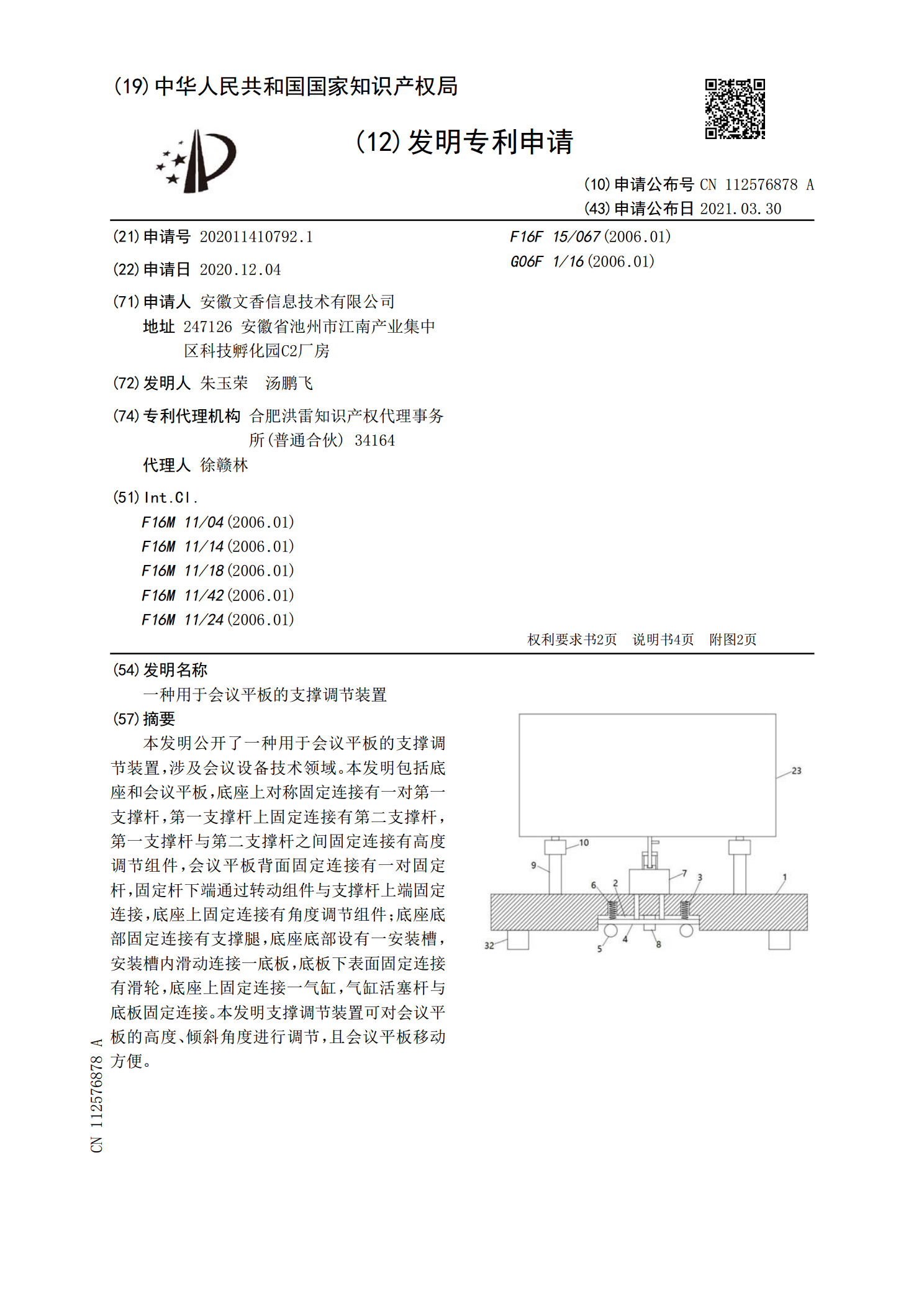
本发明公开了一种用于会议平板的支撑调节装置,涉及会议设备技术领域。本发明包括底座和会议平板,底座上对称固定连接有一对第一支撑杆,第一支撑杆上固定连接有第二支撑杆,第一支撑杆与第二支撑杆之间固定连接有高度调节组件,会议平板背面固定连接有一对固定杆,固定杆下端通过转动组件与支撑杆上端固定连接,底座上固定连接有角度调节组件;底座底部固定连接有支撑腿,底座底部设有一安装槽,安装槽内滑动连接一底板,底板下表面固定连接有滑轮,底座上固定连接一气缸,气缸活塞杆与底板固定连接。本发明支撑调节装置可对会议平板的高度、倾斜角

一种用于工程液压支架的调节装置.pdf
本发明公开了一种用于工程液压支架的调节装置,涉及工程设备技术领域,包括支撑板和安装在支撑板下表面的自锁万向滚轮,支撑板的上表面固定连接有空心箱,空心箱内安装有传动装置,传动装置的输出端固定连接有收纳辊,收纳辊上缠绕有连接带,所述支撑板的外侧设有转动把手,所述支撑板上固定连接有高度调节装置,高度调节装置的顶端固定连接有位移调节装置,所述支撑板上固定连接有滑轨,滑轨的两端固定连接有限位块;连接带只能通过收纳辊的转动来进行收卷或者放卷,但是不能以连接带作为驱动端来使收纳辊转动,使液压支架能够围绕其与安装板的铰接
用于滑动调节装置的液压总成的液压块.pdf
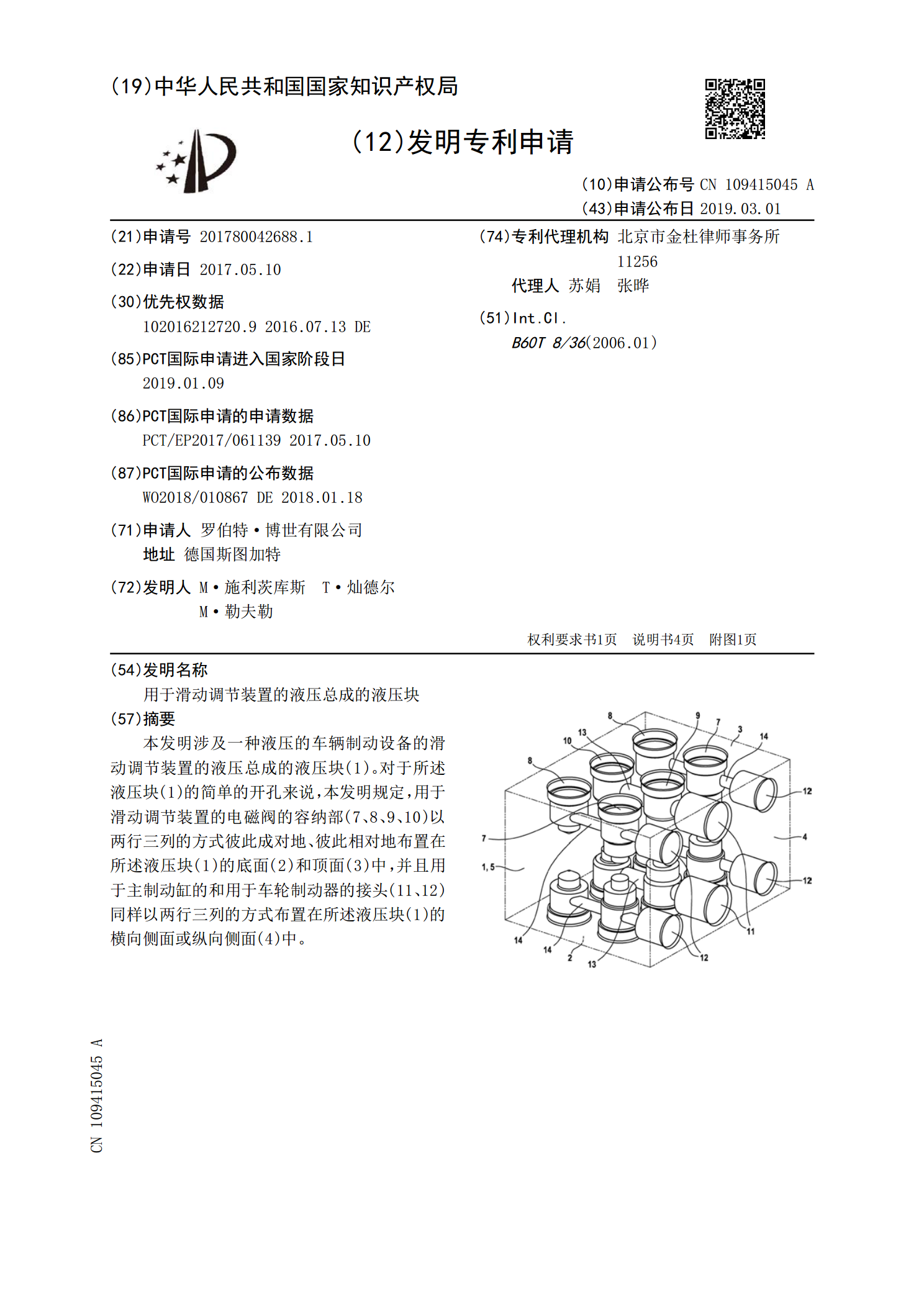
本发明涉及一种液压的车辆制动设备的滑动调节装置的液压总成的液压块(1)。对于所述液压块(1)的简单的开孔来说,本发明规定,用于滑动调节装置的电磁阀的容纳部(7、8、9、10)以两行三列的方式彼此成对地、彼此相对地布置在所述液压块(1)的底面(2)和顶面(3)中,并且用于主制动缸的和用于车轮制动器的接头(11、12)同样以两行三列的方式布置在所述液压块(1)的横向侧面或纵向侧面(4)中。