
一种在机充电式无人机、起降平台及系统.pdf

光誉****君哥

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种在机充电式无人机、起降平台及系统.pdf
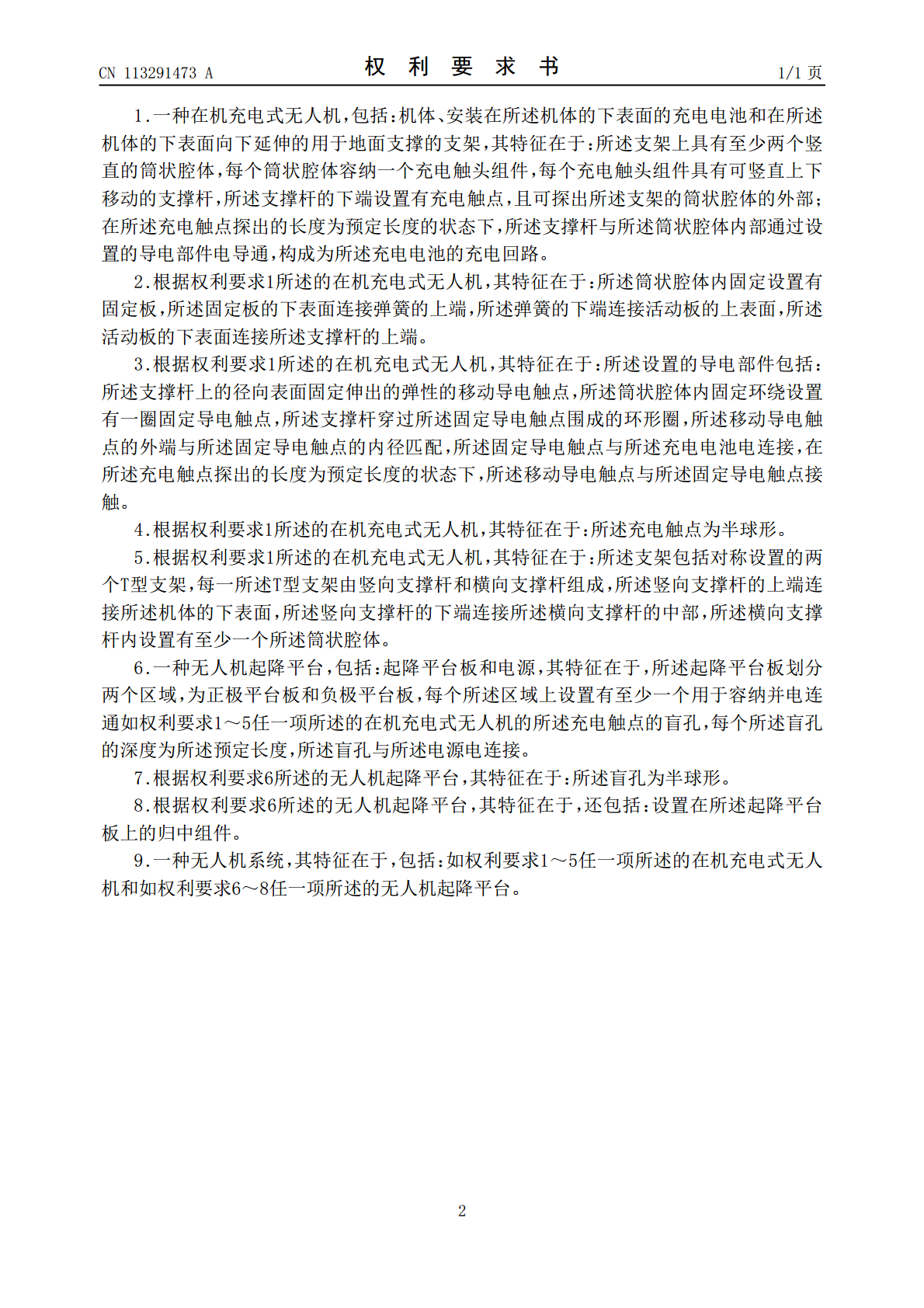
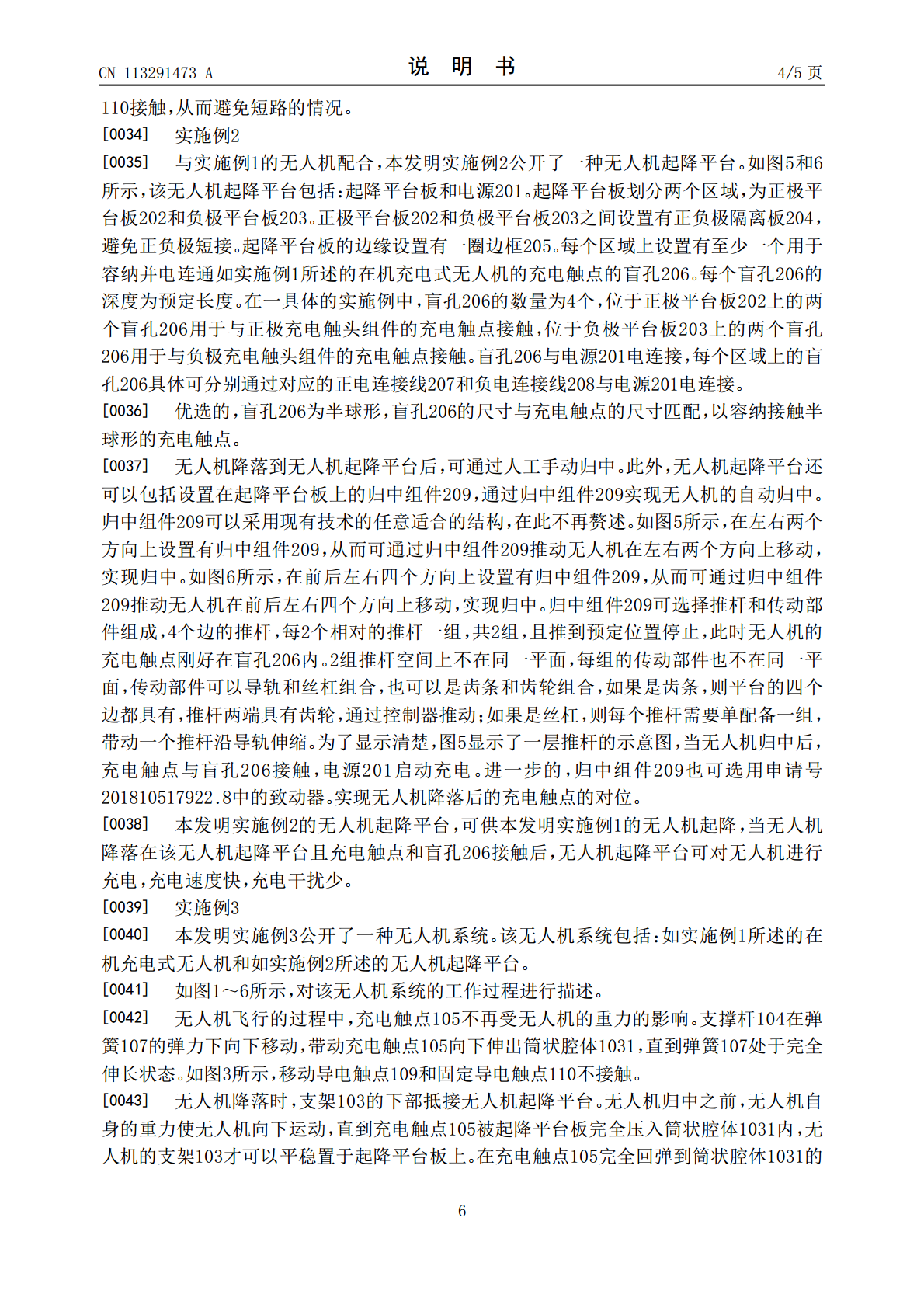
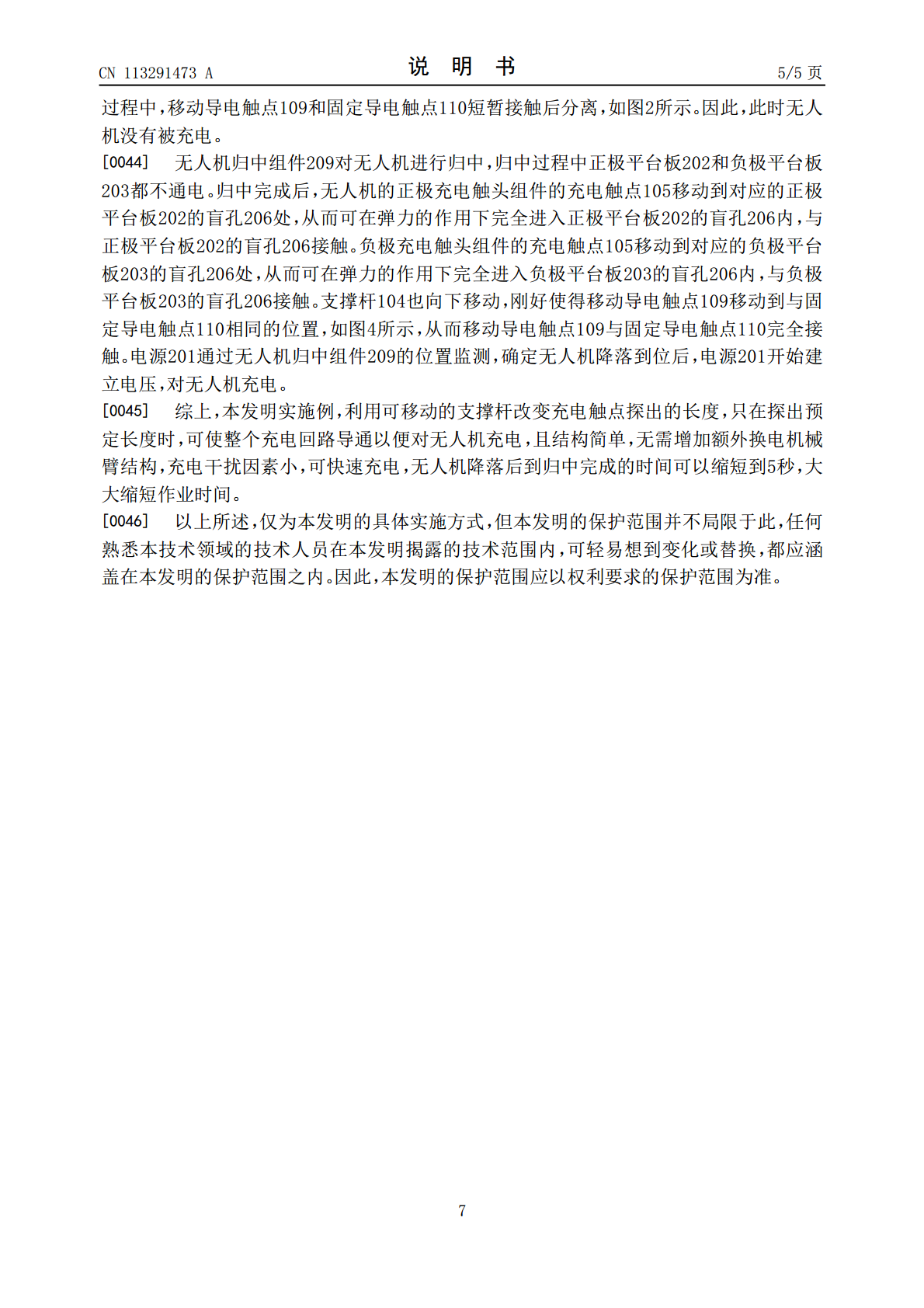
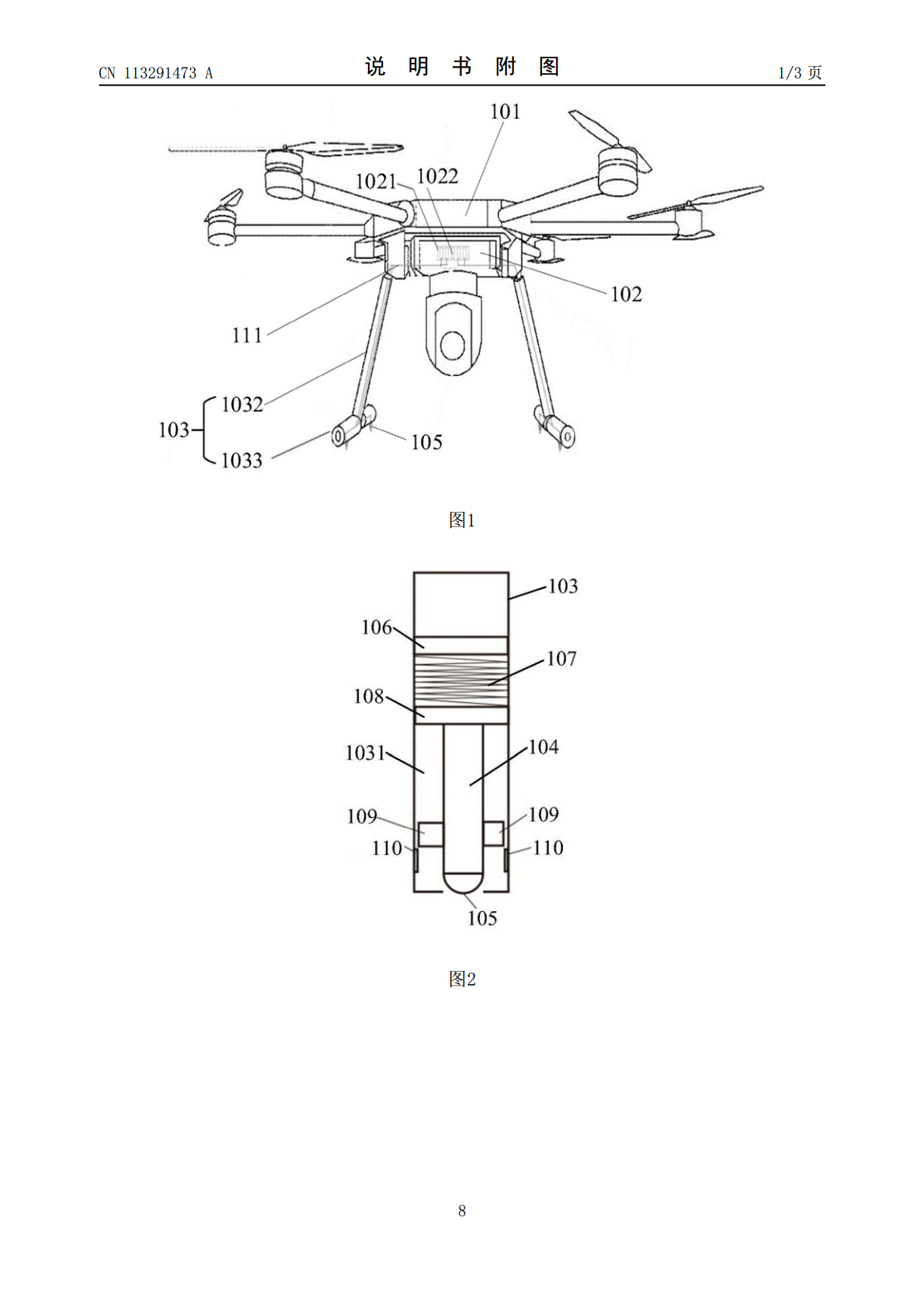
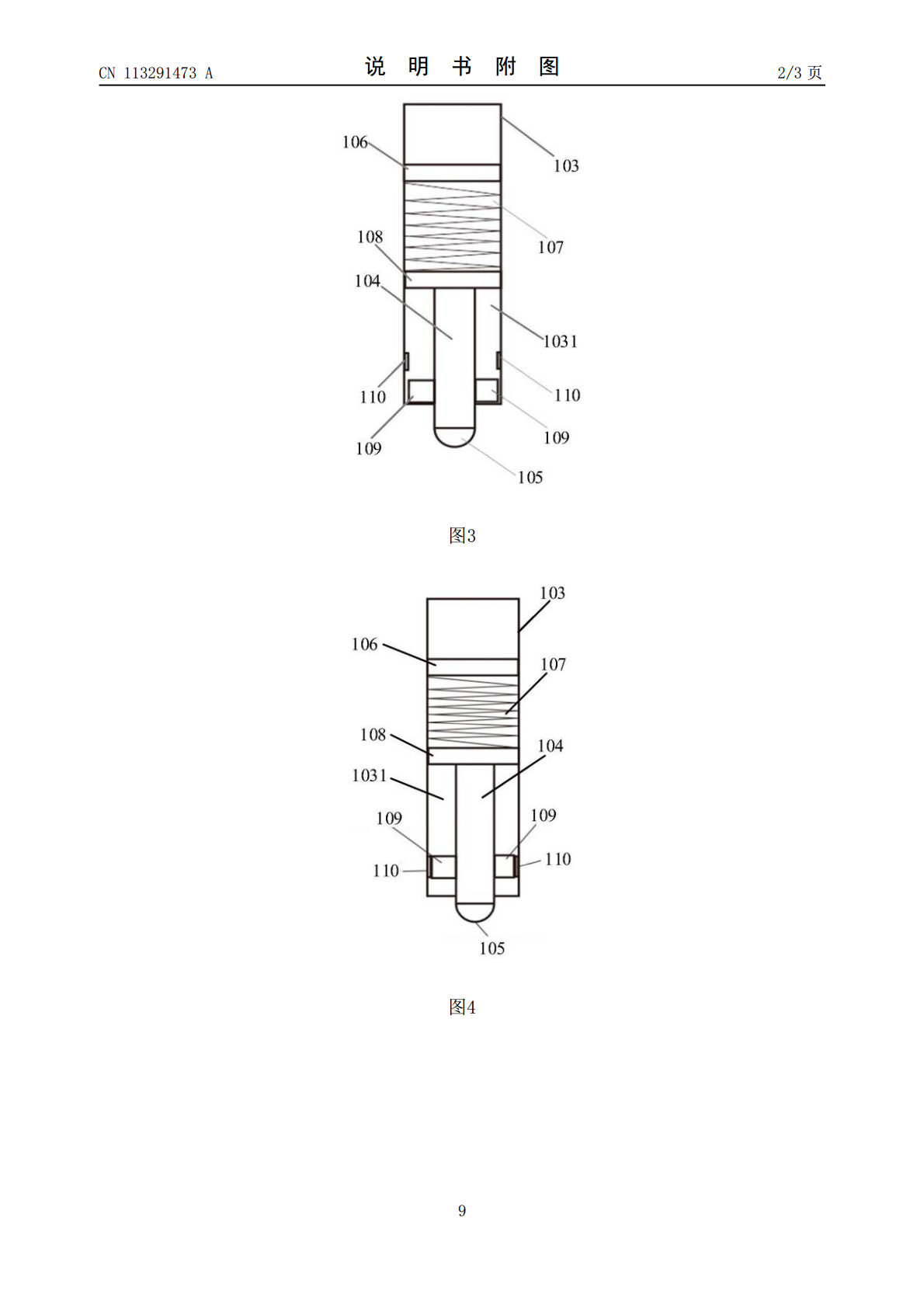
本发明公开一种在机充电式无人机、起降平台及系统。无人机包括:机体、安装在所述机体的下表面的充电电池和在所述机体的下表面向下延伸的用于地面支撑的支架,所述支架上具有至少两个竖直的筒状腔体,每个筒状腔体容纳一个充电触头组件,每个充电触头组件具有可竖直上下移动的支撑杆,所述支撑杆的下端设置有充电触点,且可探出所述支架的筒状腔体的外部;在所述充电触点探出的长度为预定长度的状态下,所述支撑杆与所述筒状腔体内部通过设置的导电部件电导通,构成为所述充电电池的充电回路。本发明利用可移动的支撑杆改变充电触点探出的长度,只在
一种无人机起降平台.pdf
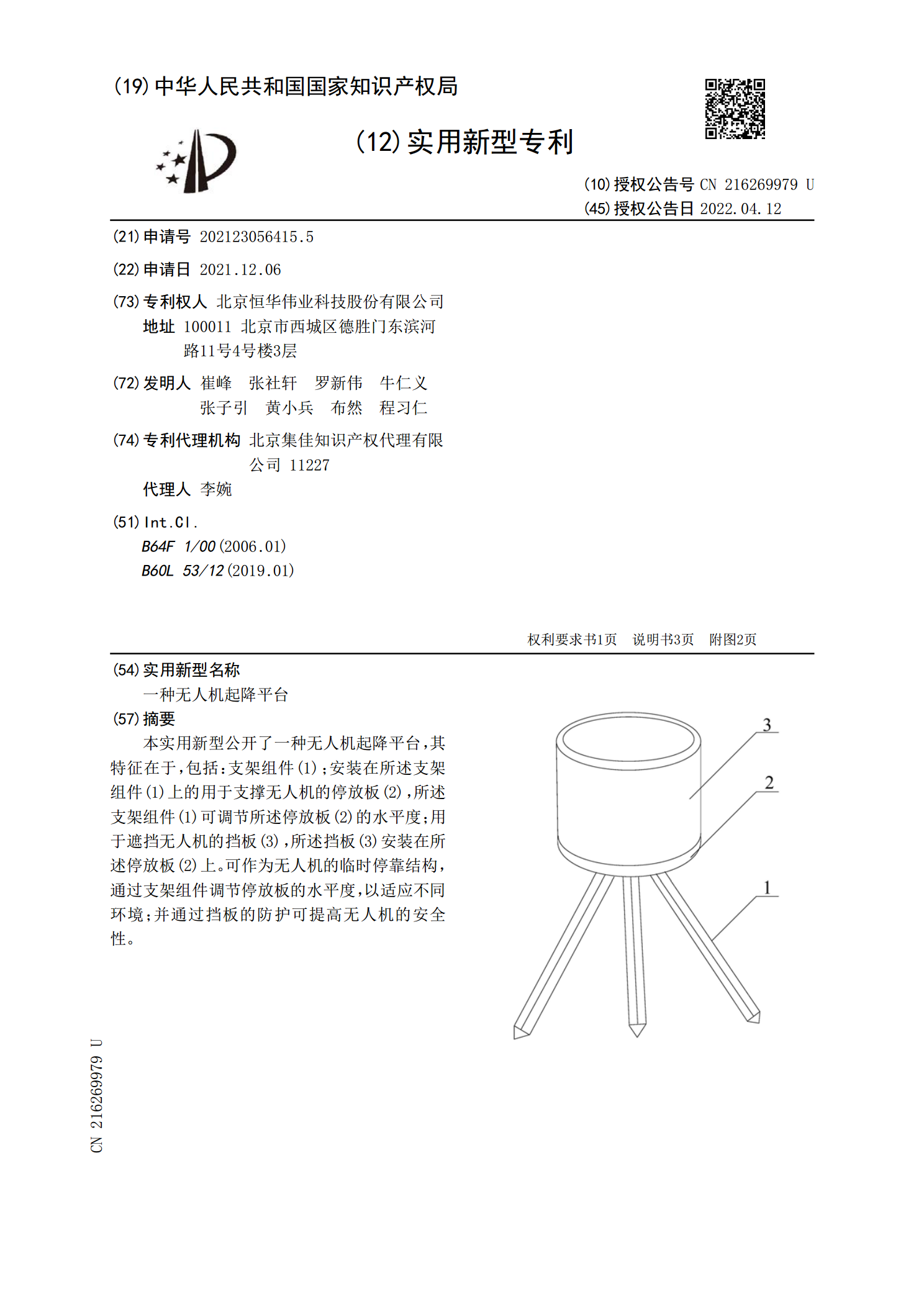
本实用新型公开了一种无人机起降平台,其特征在于,包括:支架组件(1);安装在所述支架组件(1)上的用于支撑无人机的停放板(2),所述支架组件(1)可调节所述停放板(2)的水平度;用于遮挡无人机的挡板(3),所述挡板(3)安装在所述停放板(2)上。可作为无人机的临时停靠结构,通过支架组件调节停放板的水平度,以适应不同环境;并通过挡板的防护可提高无人机的安全性。
一种无人机起降平台.pdf
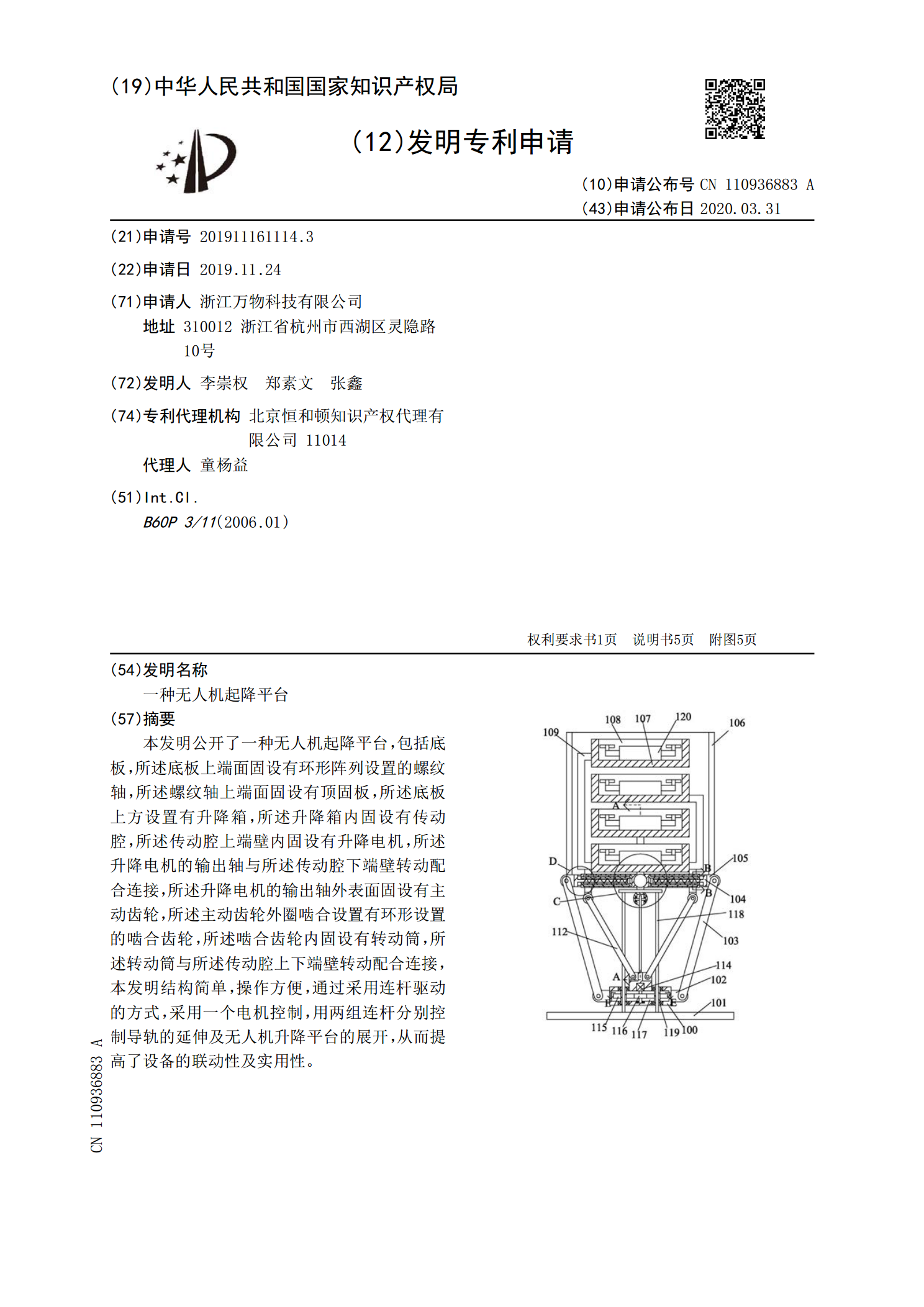
本发明公开了一种无人机起降平台,包括底板,所述底板上端面固设有环形阵列设置的螺纹轴,所述螺纹轴上端面固设有顶固板,所述底板上方设置有升降箱,所述升降箱内固设有传动腔,所述传动腔上端壁内固设有升降电机,所述升降电机的输出轴与所述传动腔下端壁转动配合连接,所述升降电机的输出轴外表面固设有主动齿轮,所述主动齿轮外圈啮合设置有环形设置的啮合齿轮,所述啮合齿轮内固设有转动筒,所述转动筒与所述传动腔上下端壁转动配合连接,本发明结构简单,操作方便,通过采用连杆驱动的方式,采用一个电机控制,用两组连杆分别控制导轨的延伸及
一种无人机起降平台.pdf
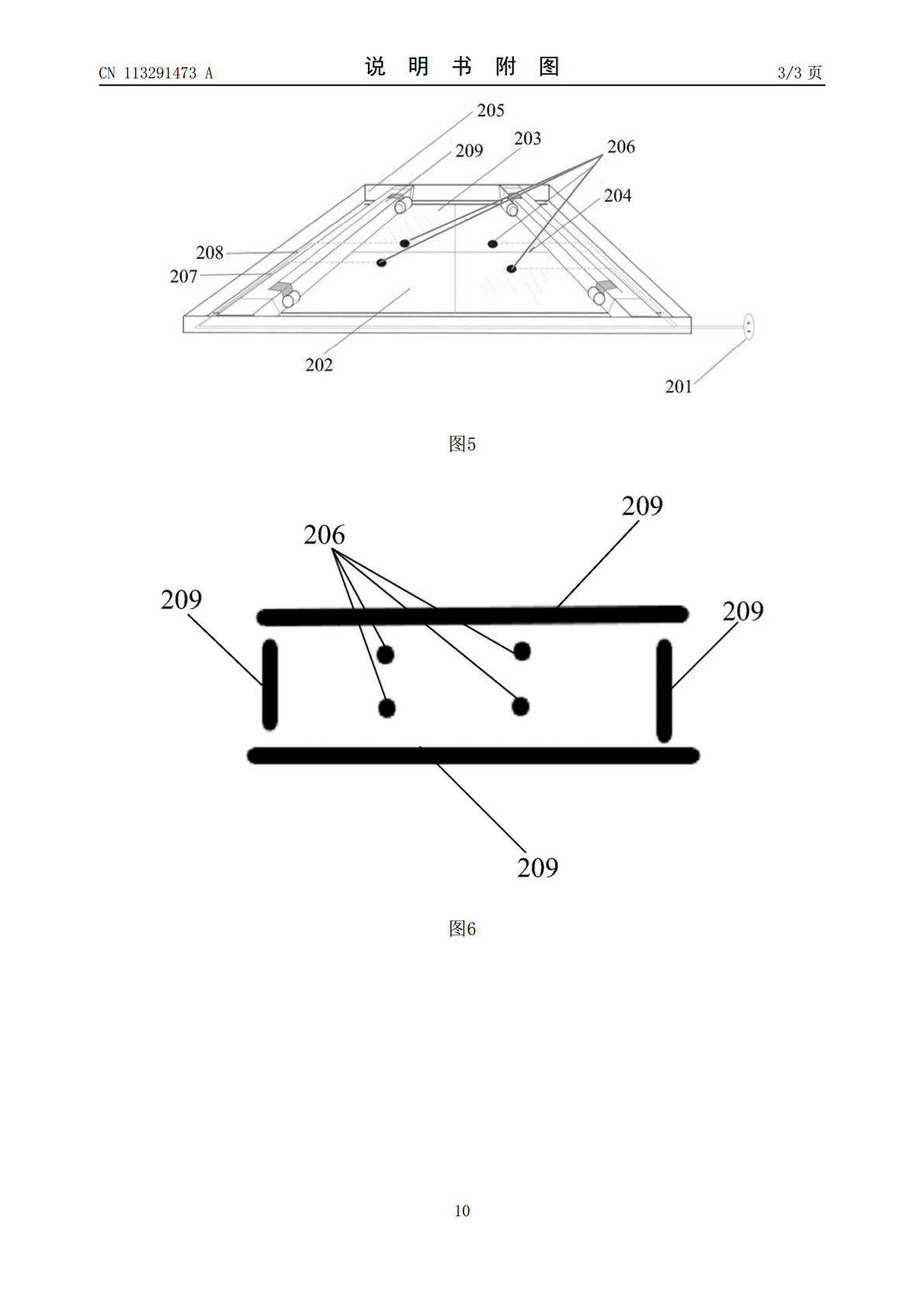
本发明涉及一种无人机起降平台,包括由底板、侧板和顶板构成的箱体,所述底板与侧板之间铰接,所述侧板与侧板之间、侧板与顶板之间通过卡扣固定连接;所述底板上均匀分布用多个第三弹簧,所述第三弹簧顶端固定有支撑板,所述支撑板侧壁上铰接有多个支撑杆,所述支撑杆自由端与所述底板滑动连接,所述支撑板顶面用于停放无人机;所述侧板上均设置有保护装置;本发明的无人机,在底板和侧板上均设置有弹簧,从而能够形成减震装置,在运输过程中,能够抵消颠簸振动带来的作用力,保证无人机的安全运输。
一种农药喷洒无人机起降平台.pdf
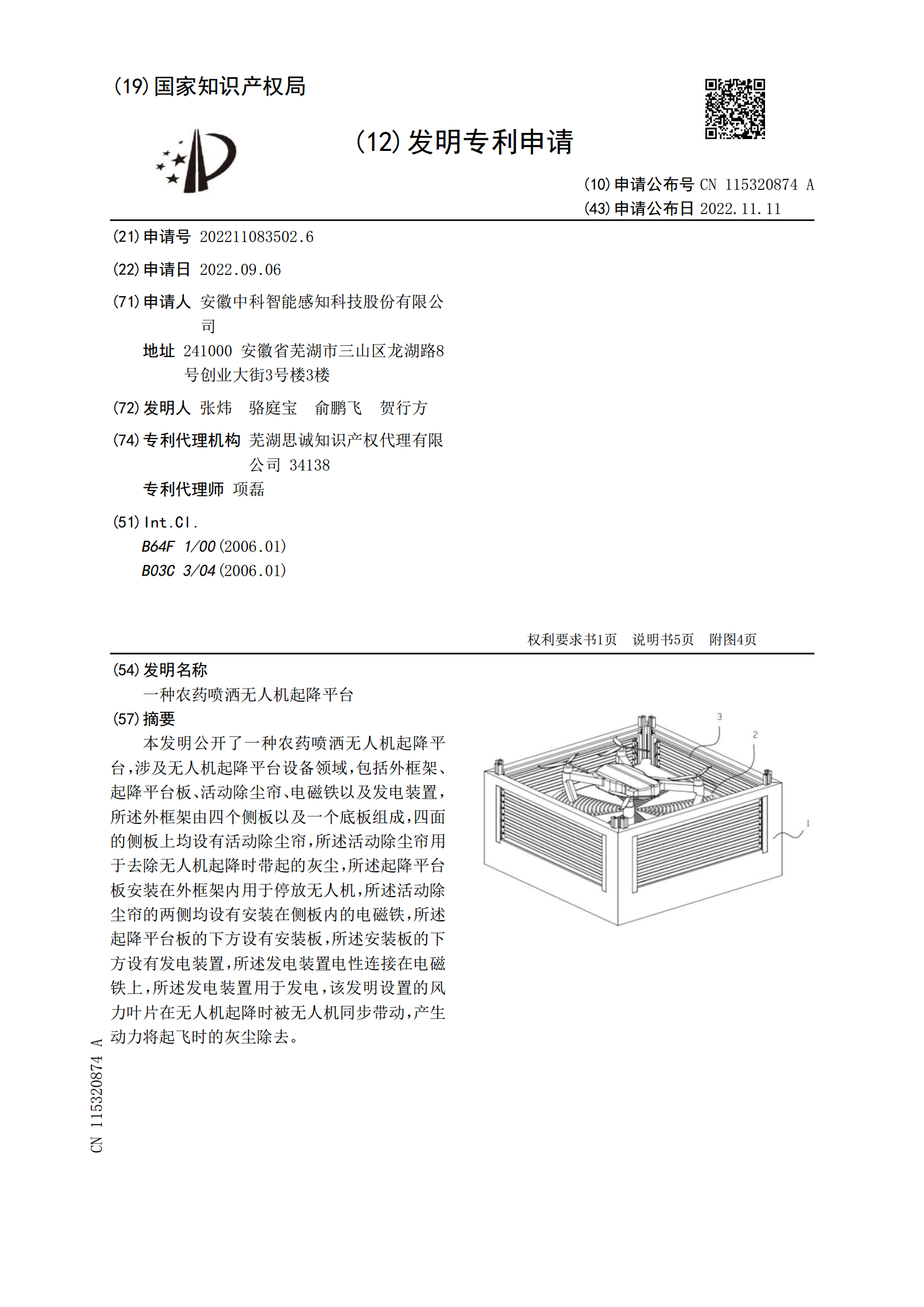
本发明公开了一种农药喷洒无人机起降平台,涉及无人机起降平台设备领域,包括外框架、起降平台板、活动除尘帘、电磁铁以及发电装置,所述外框架由四个侧板以及一个底板组成,四面的侧板上均设有活动除尘帘,所述活动除尘帘用于去除无人机起降时带起的灰尘,所述起降平台板安装在外框架内用于停放无人机,所述活动除尘帘的两侧均设有安装在侧板内的电磁铁,所述起降平台板的下方设有安装板,所述安装板的下方设有发电装置,所述发电装置电性连接在电磁铁上,所述发电装置用于发电,该发明设置的风力叶片在无人机起降时被无人机同步带动,产生动力将起