
管道机器人行走机构.pdf

Jo****34


1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

管道机器人的行走机构.pdf
本发明提出一种管道机器人的行走机构,管道机器人的行走机构包括:蜗杆和驱动蜗杆的电机,蜗杆的轴线与管道的轴线重合;三组行星齿轮组,分别位于三个平面内,每组行星齿轮组包括:与蜗杆啮合的蜗轮,蜗轮上同轴连接有太阳轮,以及相互分离并分别与太阳轮啮合的两个行星轮,每个行星轮分别同轴连接有一个行走轮,行走轮的直径大于行星轮的直径,两个行走轮中,一个行走轮通过第一连杆臂铰接在太阳轮的转轴上,第一连杆臂与第二连杆臂之间形成的夹角的最小数值为0度、最大数值为180度。本发明中,机器人不需要外在的弹簧力形成封闭力系,靠蜗杆驱
管道机器人行走机构.pdf
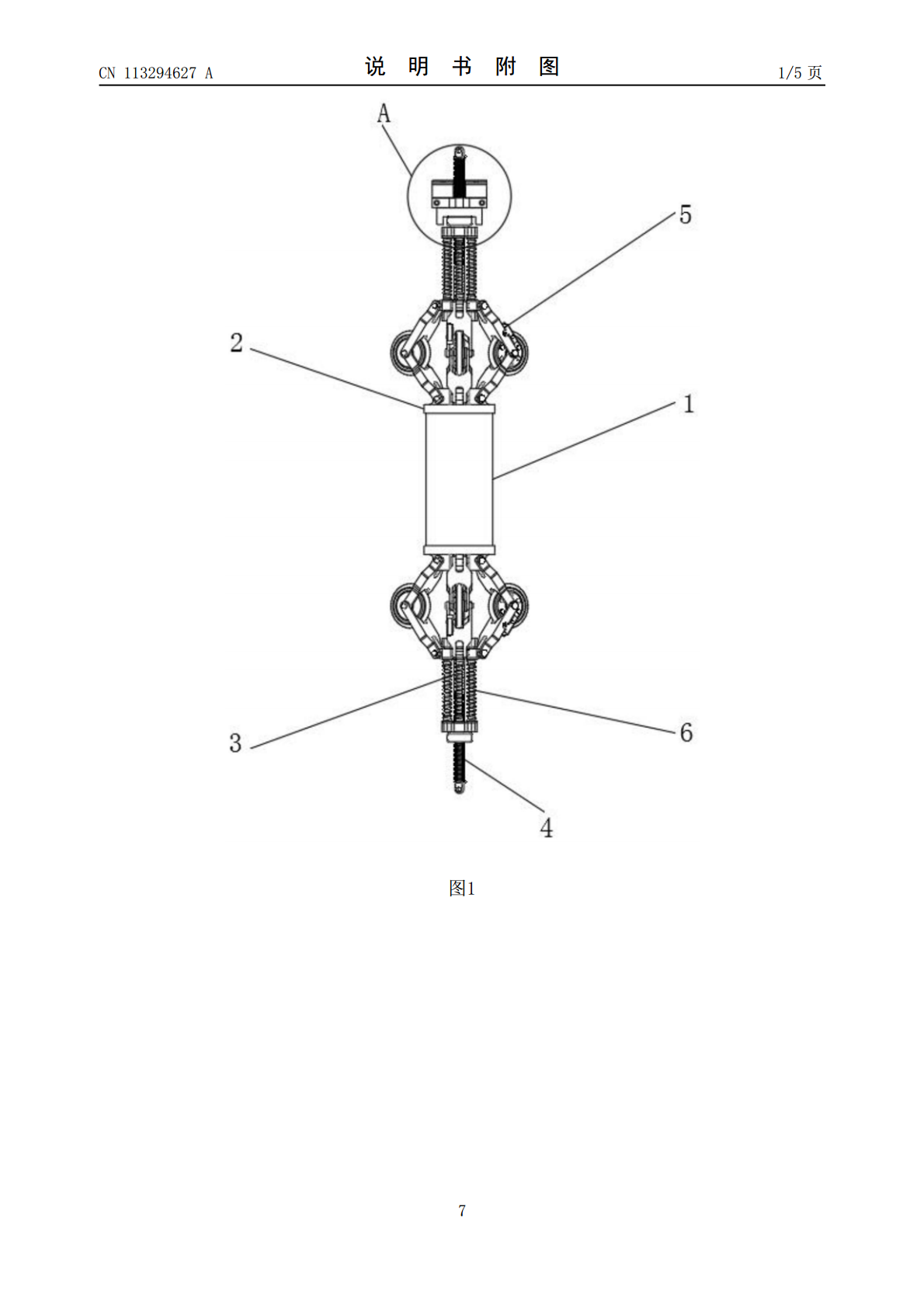
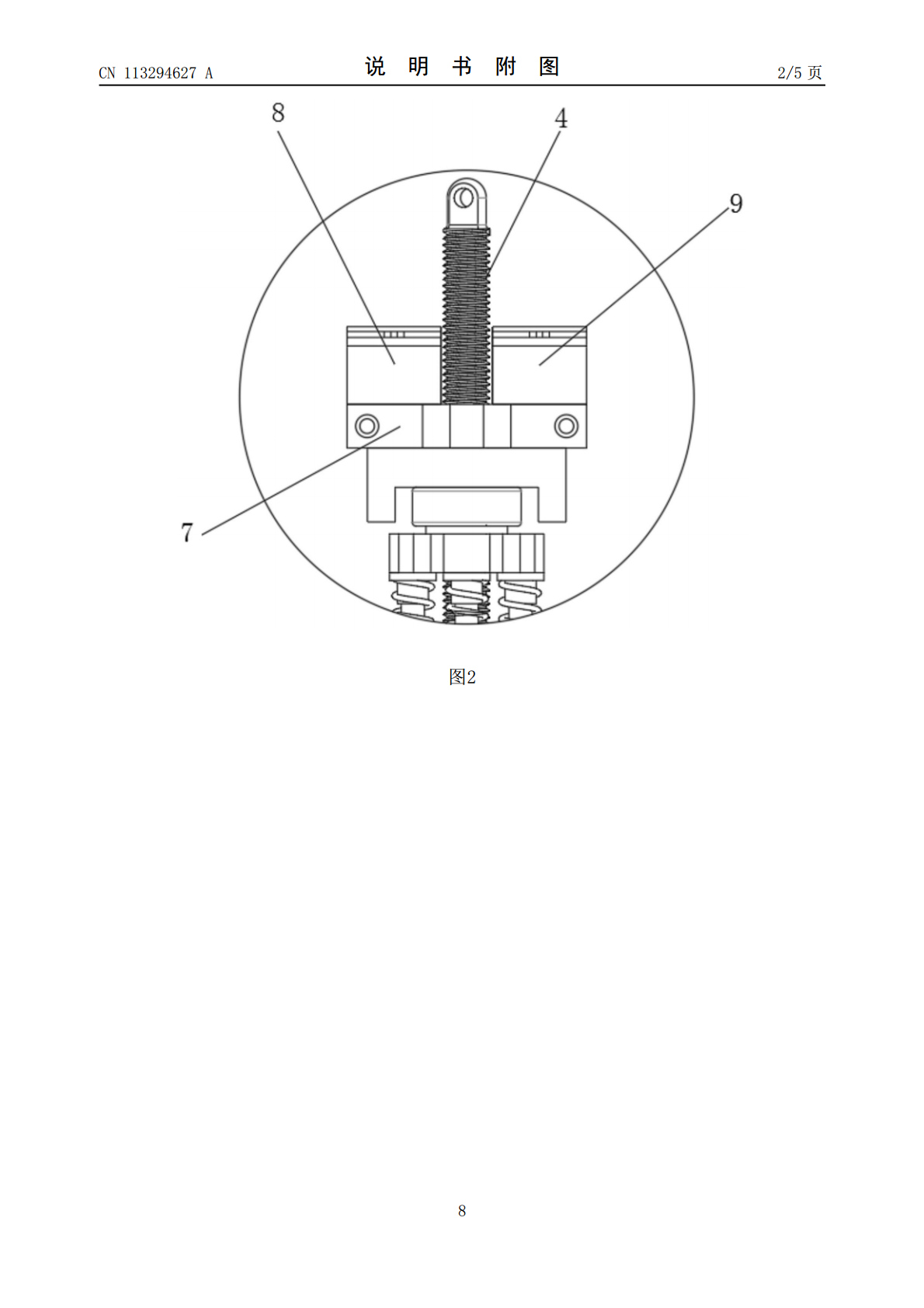
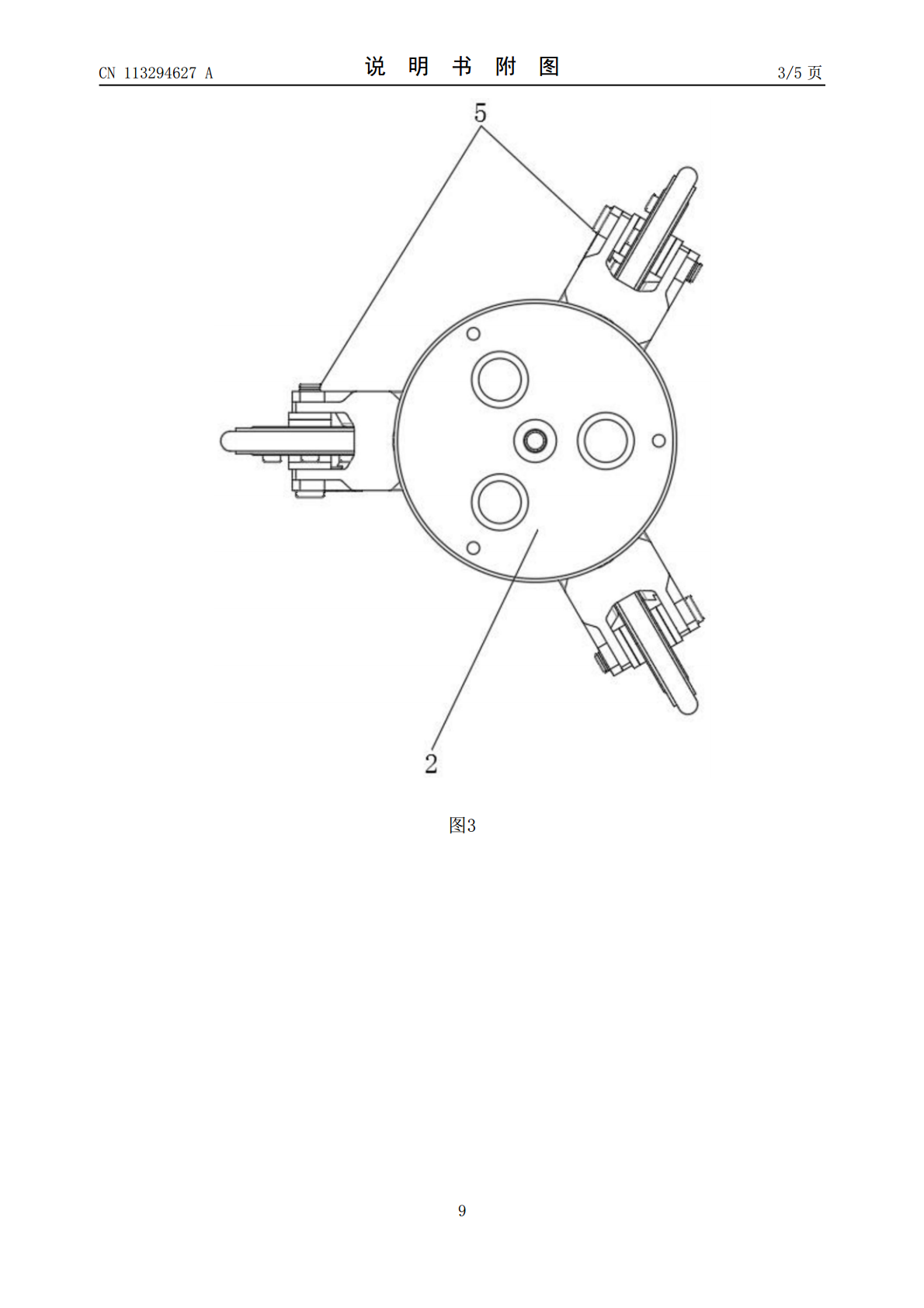
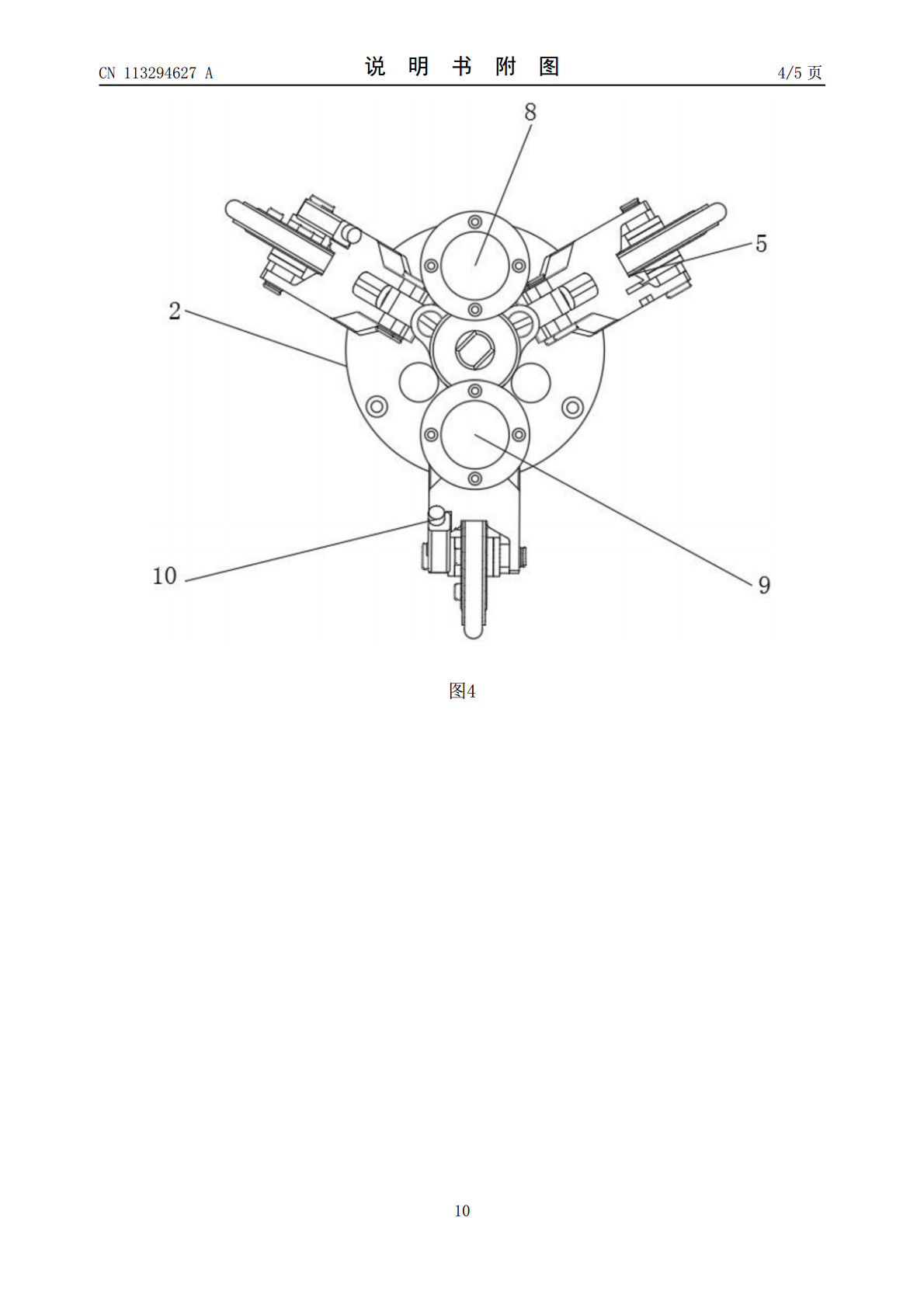
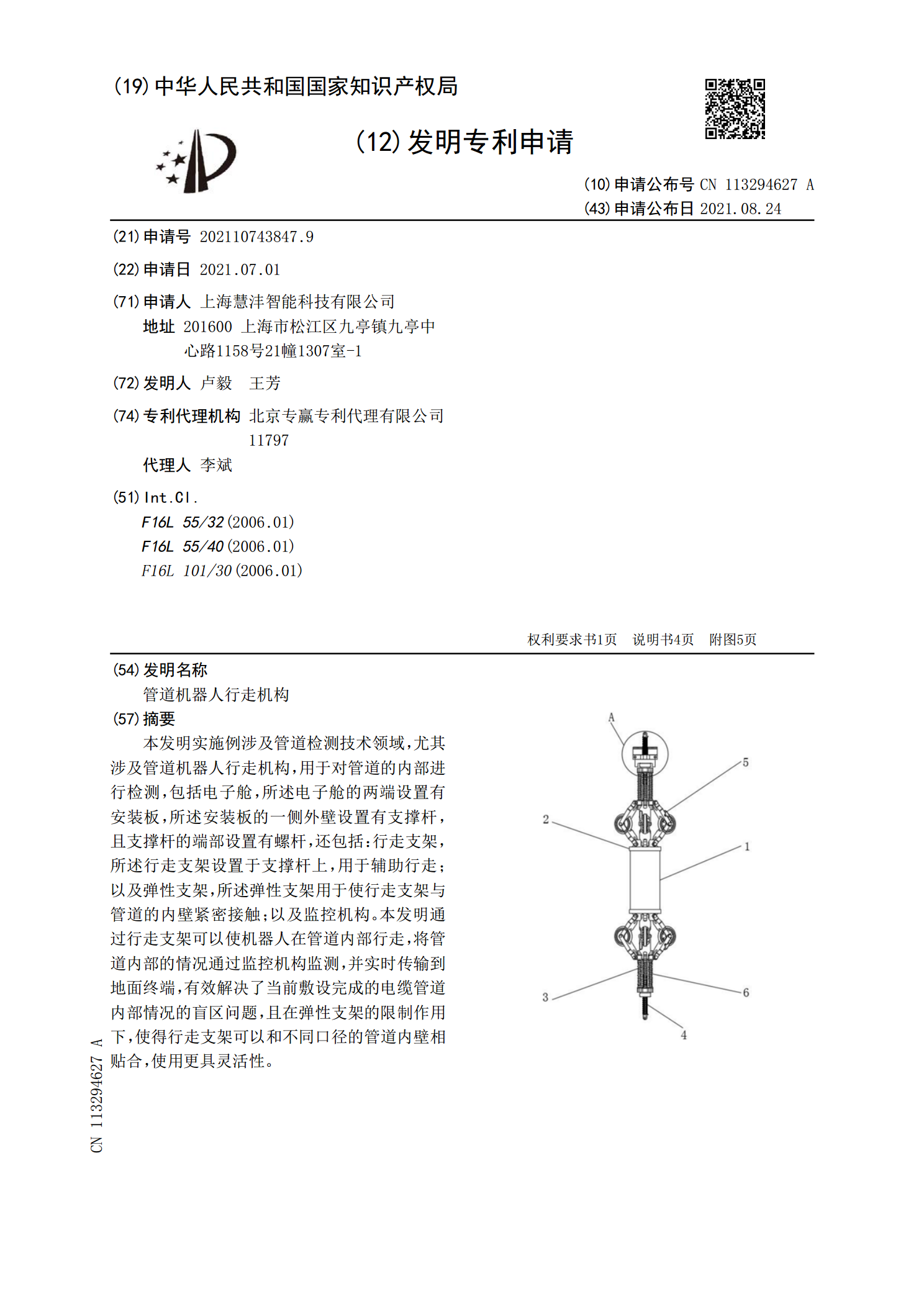
本发明实施例涉及管道检测技术领域,尤其涉及管道机器人行走机构,用于对管道的内部进行检测,包括电子舱,所述电子舱的两端设置有安装板,所述安装板的一侧外壁设置有支撑杆,且支撑杆的端部设置有螺杆,还包括:行走支架,所述行走支架设置于支撑杆上,用于辅助行走;以及弹性支架,所述弹性支架用于使行走支架与管道的内壁紧密接触;以及监控机构。本发明通过行走支架可以使机器人在管道内部行走,将管道内部的情况通过监控机构监测,并实时传输到地面终端,有效解决了当前敷设完成的电缆管道内部情况的盲区问题,且在弹性支架的限制作用下,使得
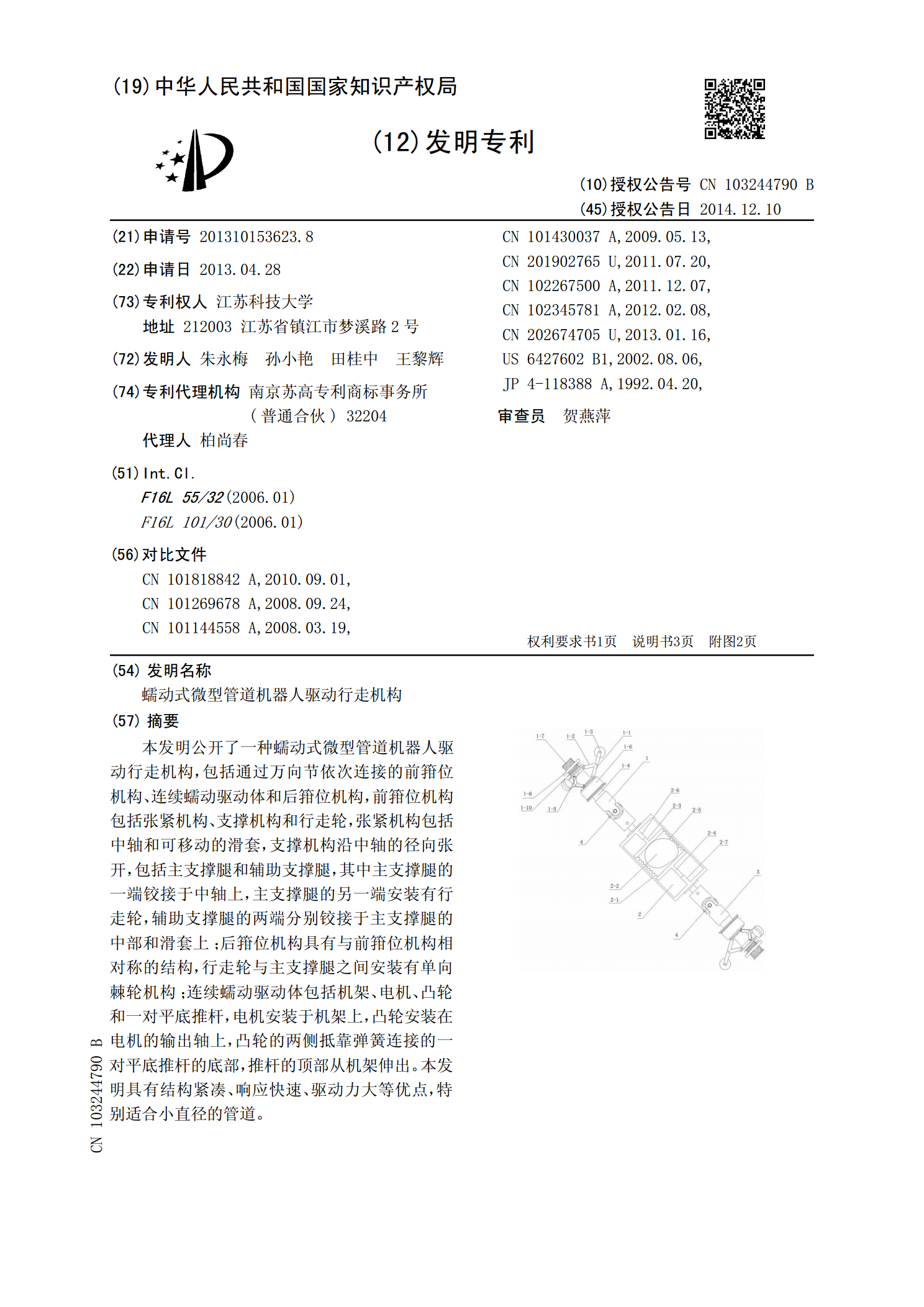
蠕动式微型管道机器人驱动行走机构.pdf
本发明公开了一种蠕动式微型管道机器人驱动行走机构,包括通过万向节依次连接的前箝位机构、连续蠕动驱动体和后箝位机构,前箝位机构包括张紧机构、支撑机构和行走轮,张紧机构包括中轴和可移动的滑套,支撑机构沿中轴的径向张开,包括主支撑腿和辅助支撑腿,其中主支撑腿的一端铰接于中轴上,主支撑腿的另一端安装有行走轮,辅助支撑腿的两端分别铰接于主支撑腿的中部和滑套上;后箝位机构具有与前箝位机构相对称的结构,行走轮与主支撑腿之间安装有单向棘轮机构;连续蠕动驱动体包括机架、电机、凸轮和一对平底推杆,电机安装于机架上,凸轮安装在

一种管道机器人驱动行走机构.pdf
一种管道机器人驱动行走机构。主要解决现有的管道机器人驱动行走机构拖动力较小、管径适应性较差以及越障能力不足等问题。其特征在于:所述驱动行走机构还包括有一个位于本体中的轮腿调节电机,以及三组位于本体外的行走驱动单元,以及三组由前支撑连杆、后支撑连杆和调节连杆组合后构成的弹性轮腿支架单元,以及一个管径适应调节单元;由本体、前后支撑连杆以及行走驱动单元构成一个平行四边形轮腿结构。其中,管径适应调节单元感受来自于管壁的压力后,调节前、后支撑连杆以适应管径变化;而每组行走驱动单元由两台电机驱动以保持较大拖动力。该机
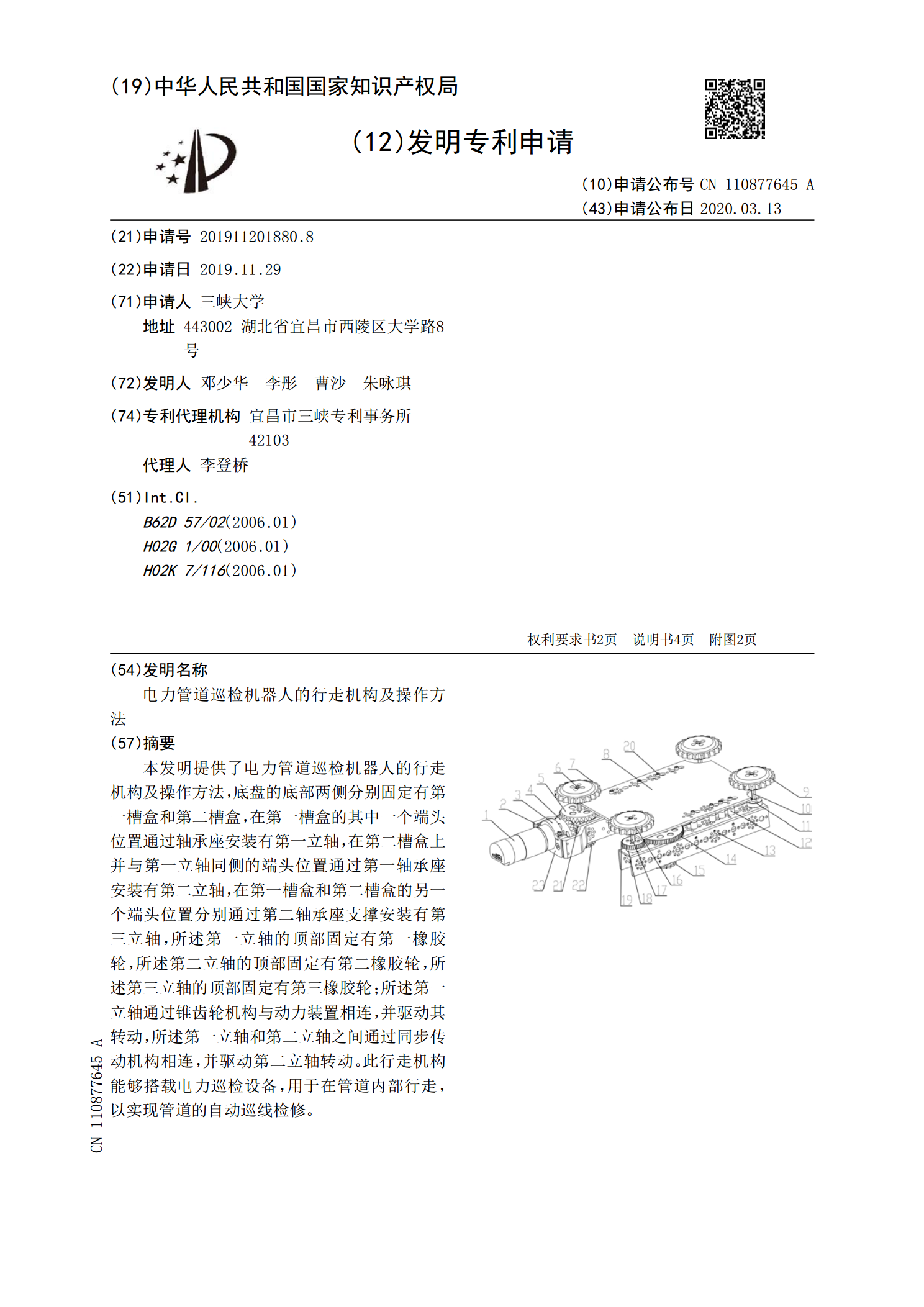
电力管道巡检机器人的行走机构及操作方法.pdf
本发明提供了电力管道巡检机器人的行走机构及操作方法,底盘的底部两侧分别固定有第一槽盒和第二槽盒,在第一槽盒的其中一个端头位置通过轴承座安装有第一立轴,在第二槽盒上并与第一立轴同侧的端头位置通过第一轴承座安装有第二立轴,在第一槽盒和第二槽盒的另一个端头位置分别通过第二轴承座支撑安装有第三立轴,所述第一立轴的顶部固定有第一橡胶轮,所述第二立轴的顶部固定有第二橡胶轮,所述第三立轴的顶部固定有第三橡胶轮;所述第一立轴通过锥齿轮机构与动力装置相连,并驱动其转动,所述第一立轴和第二立轴之间通过同步传动机构相连,并驱动