
一种楼梯清扫六足机器人.pdf

是你****噩呀


1/9

2/9

3/9

4/9
5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种楼梯清扫六足机器人.pdf
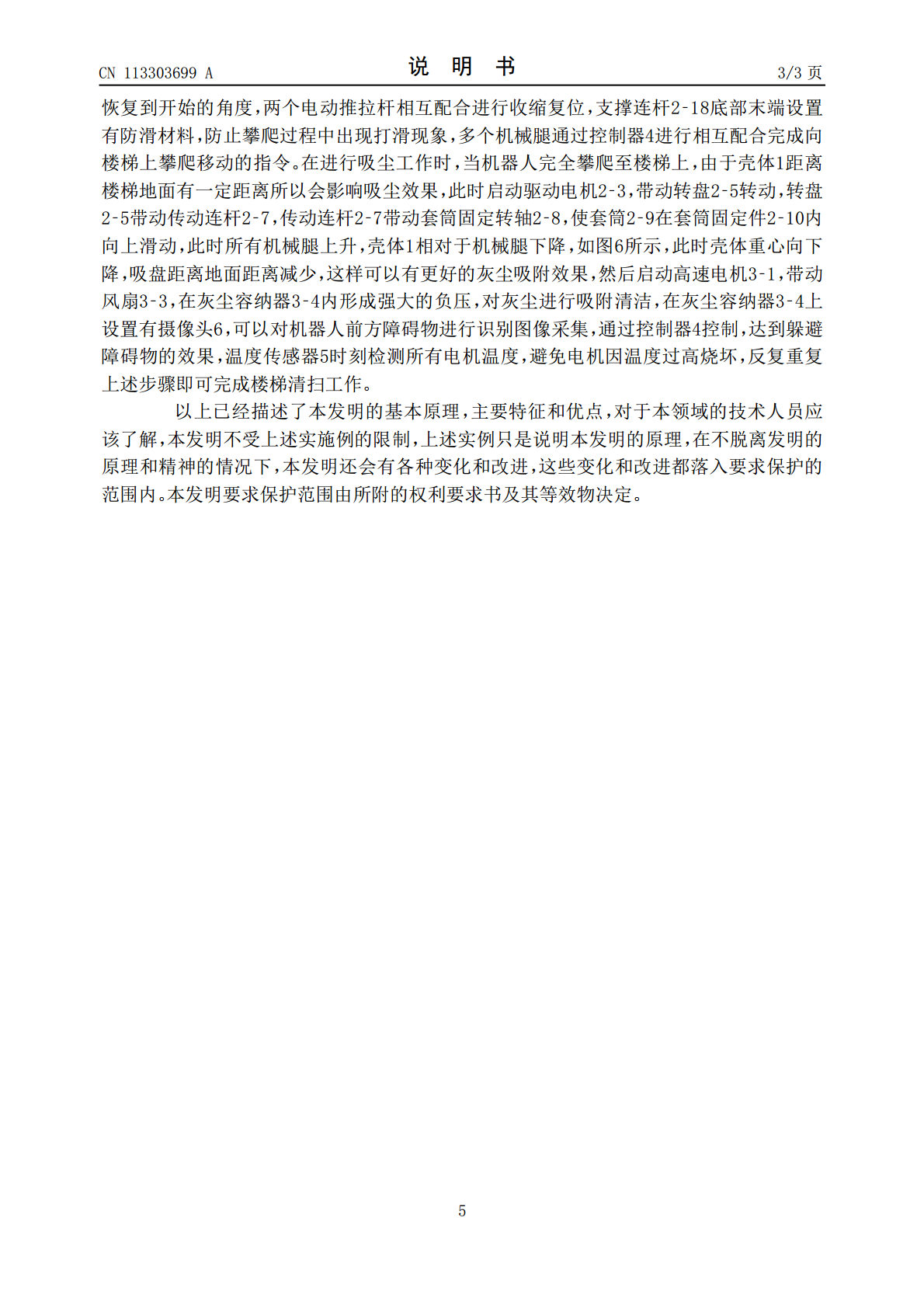
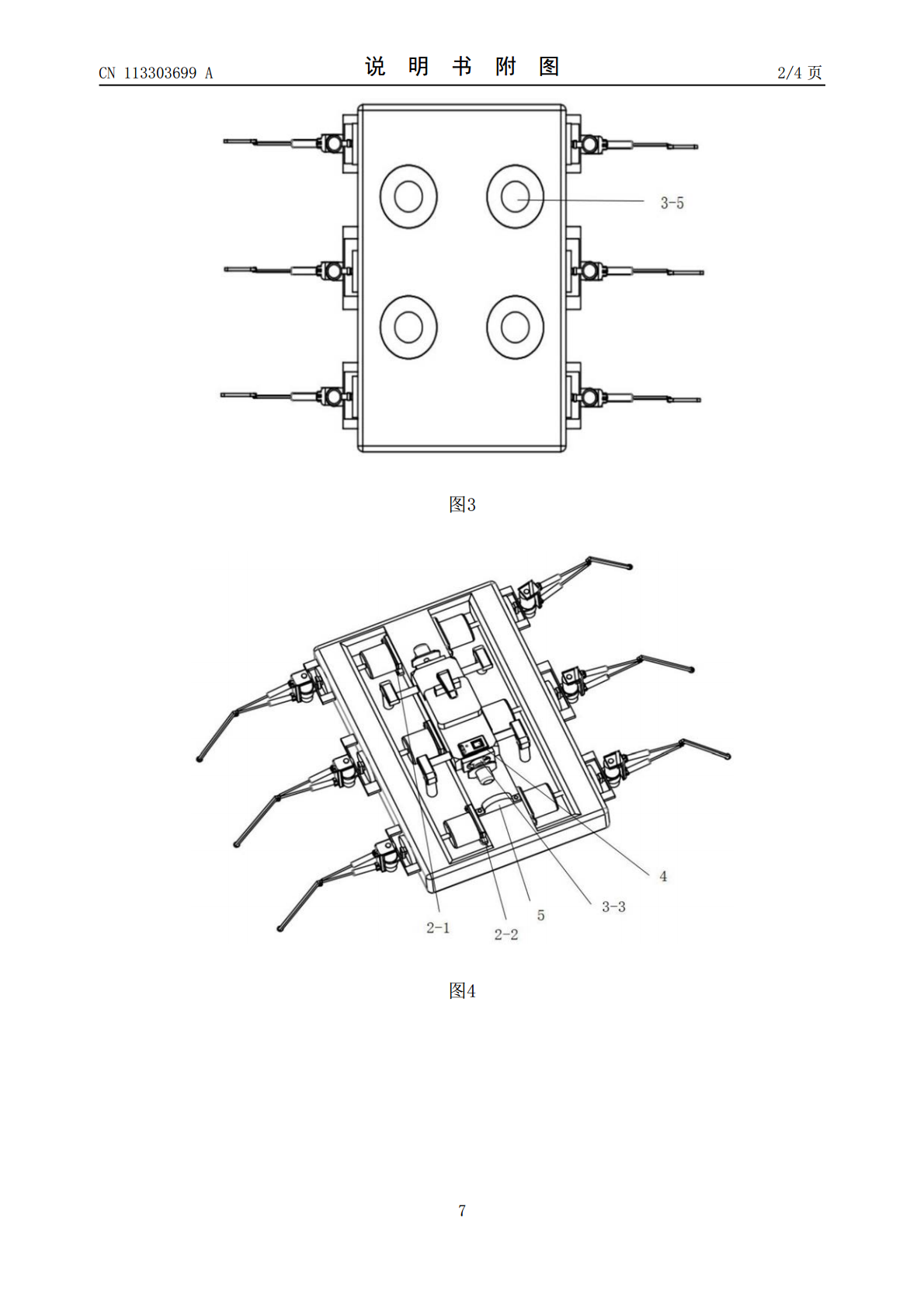
本发明公开了一种楼梯清扫六足机器人,包括壳体,步行机构,吸尘机构,蓄电池,控制器,温度传感器,摄像头,所述步行机构设置在壳体外表面左右两侧,所述吸尘机构设置在壳体上方,所述步行机构包括驱动电机,驱动电机固定件驱动电机固定件固定螺栓,驱动电机输出端,转盘,传动连杆固定转轴,传动连杆,套筒固定转轴,套筒,套筒固定件,平移转动电机,固定件,固定销,电动推拉杆,电动推拉杆固定件,电动推拉杆固定螺栓,足部支撑杆,足部支撑杆固定螺栓,所述吸尘机构包括高速电机,高速电机固定件,风扇,吸尘容纳器,吸盘,吸尘管道。本发明结
一种楼梯清扫机器人.pdf
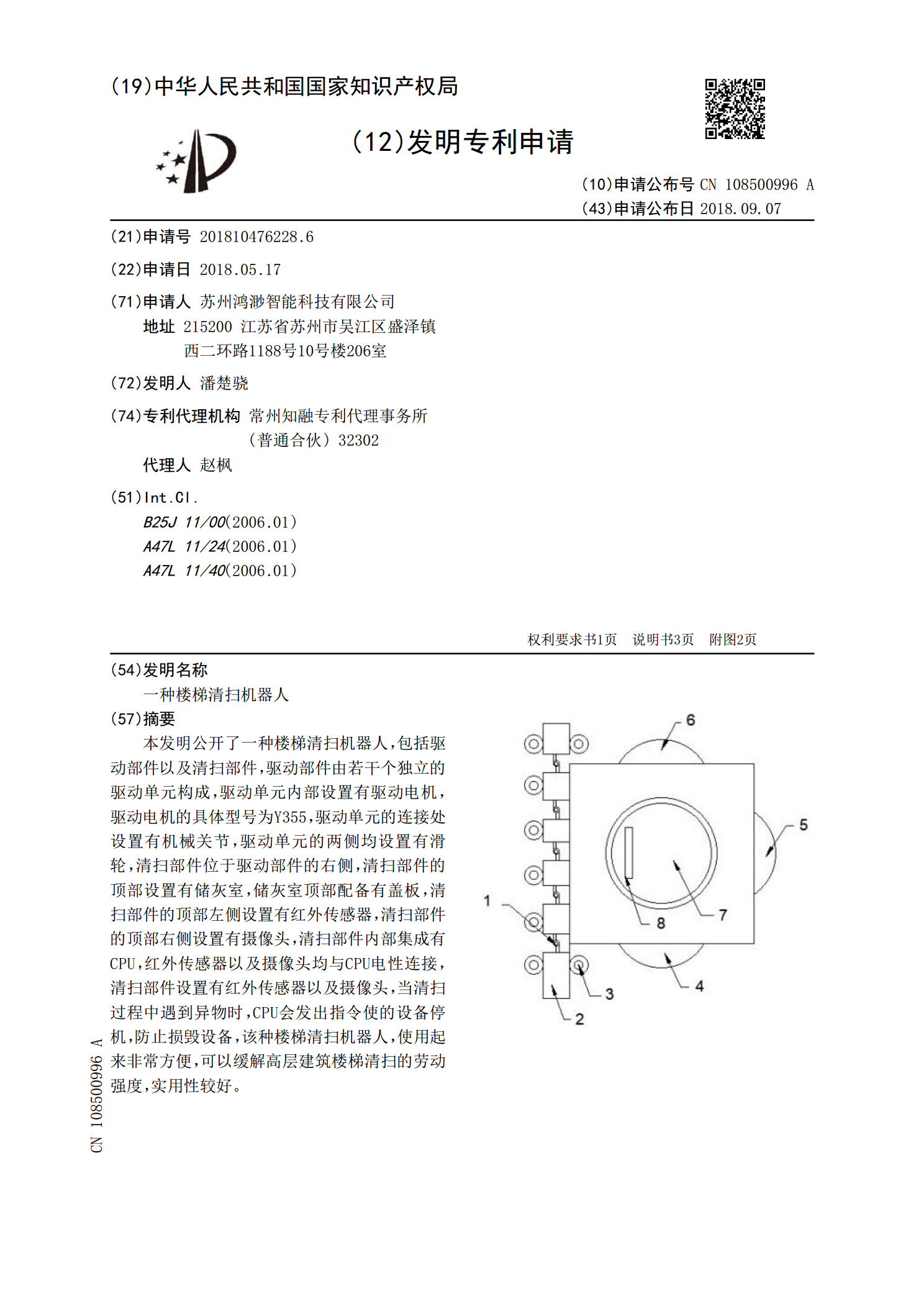
本发明公开了一种楼梯清扫机器人,包括驱动部件以及清扫部件,驱动部件由若干个独立的驱动单元构成,驱动单元内部设置有驱动电机,驱动电机的具体型号为Y355,驱动单元的连接处设置有机械关节,驱动单元的两侧均设置有滑轮,清扫部件位于驱动部件的右侧,清扫部件的顶部设置有储灰室,储灰室顶部配备有盖板,清扫部件的顶部左侧设置有红外传感器,清扫部件的顶部右侧设置有摄像头,清扫部件内部集成有CPU,红外传感器以及摄像头均与CPU电性连接,清扫部件设置有红外传感器以及摄像头,当清扫过程中遇到异物时,CPU会发出指令使的设备停

一种智能楼梯清扫机器人.pdf
本发明涉及一种智能楼梯清扫机器人,包括底盘、支撑机构、升降机构、伸缩机构、清扫机构、检测机构及主控机构;所述支撑机构包括前支撑架、主支撑架及后支撑架;所述后支撑架在主支撑架的后端的两侧均设有后支撑腿;所述升降机构包括第一升降单元及第二升降单元,所述第一升降单元设置在前支撑架与主支撑架之间,所述第一升降单元设置在后支撑架与主支撑架之间;所述伸缩机构设置在前支撑架上,所述伸缩机构设置在主支撑架的前端;所述后支撑腿的底部、伸缩机构的底部及底盘的底部均设有行走机构;所述清扫机构设置在底盘上;所述检测机构包括楼梯检

一种楼宇楼梯智能清扫机器人.pdf
本发明公开了一种楼宇楼梯智能清扫机器人,包括本体和下楼辅助结构,本体包括机壳、移动轮、两个旋转毛刷、抹布、水箱、吸尘器。旋转毛刷和抹布设置于机身底部前后两端,负责对地面进行清扫,下楼辅助结构包括垂直支撑杆和水平支撑杆,各自两个组成一组安装于机器人左右两侧,本发明提供的清扫机器人,在遇到楼梯时,通过垂直支撑杆和水平支撑杆的支撑作用,配合导轨及滑轮将清扫机器人本体放置于下一台阶,之后将两组支撑杆收回原位恢复至初始状态,进行当前台阶清扫工作;并且,该清扫机器人可以对楼梯转角平台识别和判断,进而可以在楼梯转角处变

一种六足楼梯攀爬轮椅.pdf
一种六足楼梯攀爬轮椅系统,属于助老助残服务机器人领域。其包括轮椅、3条椅前侧腿、3条椅背侧腿、电源控制器箱;所述电源控制器箱安装在轮椅的座位下面,内置电源和控制器;所述3条椅前侧腿分左中右均匀布置在电源控制器箱靠近轮椅的前侧,由髋关节、大腿、膝关节、小腿、踝关节和脚部组成,其大腿和小腿部分还包含由滚珠丝杠螺母机构实现的伸缩关节;所述3条椅背侧腿分左中右均匀布置在电源控制器箱靠近轮椅的背侧,由髋关节、大腿、膝关节、小腿、踝关节和脚部组成;本发明保证轮椅座位在整个楼梯攀爬过程中始终处于水平状态,保证乘员乘坐的