
一种自适应变形的船舶球鼻艏及其变形方法.pdf

岚风****55

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自适应变形的船舶球鼻艏及其变形方法.pdf
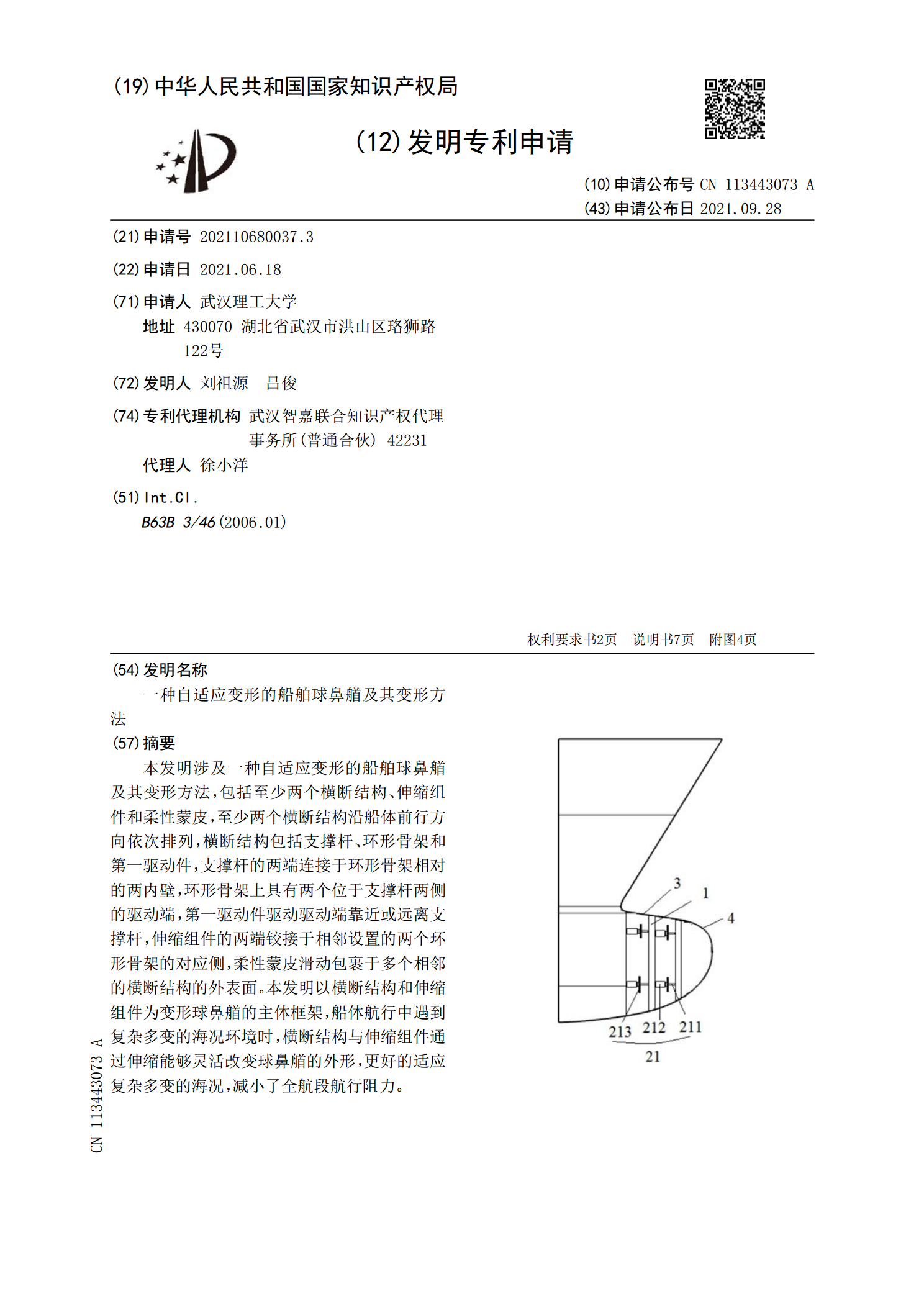
本发明涉及一种自适应变形的船舶球鼻艏及其变形方法,包括至少两个横断结构、伸缩组件和柔性蒙皮,至少两个横断结构沿船体前行方向依次排列,横断结构包括支撑杆、环形骨架和第一驱动件,支撑杆的两端连接于环形骨架相对的两内壁,环形骨架上具有两个位于支撑杆两侧的驱动端,第一驱动件驱动驱动端靠近或远离支撑杆,伸缩组件的两端铰接于相邻设置的两个环形骨架的对应侧,柔性蒙皮滑动包裹于多个相邻的横断结构的外表面。本发明以横断结构和伸缩组件为变形球鼻艏的主体框架,船体航行中遇到复杂多变的海况环境时,横断结构与伸缩组件通过伸缩能够灵

球鼻船艏斜撞船舶舷侧结构的变形机理研究.pptx
球鼻船艏斜撞船舶舷侧结构的变形机理研究目录球鼻船艏斜撞船舶舷侧结构的变形特点变形类型及特点变形程度的影响因素变形过程的物理机制球鼻船艏斜撞船舶舷侧结构的应力分布应力状态及分布规律应力集中的区域和程度应力分布与变形的相互关系球鼻船艏斜撞船舶舷侧结构的能量吸收与传递能量吸收机制能量传递路径与效率能量吸收与结构变形的耦合效应球鼻船艏斜撞船舶舷侧结构的失效模式与机理失效模式分析失效判据及影响因素失效机理及过程分析球鼻船艏斜撞船舶舷侧结构的安全防护与优化设计安全防护措施及效果评估优化设计方法及实例分析提高结构抗撞性

船舶球鼻艏换新工艺方法研究.docx
船舶球鼻艏换新工艺方法研究船舶球鼻艏换新工艺方法研究摘要:随着船舶技术的不断发展和航运业务的日益繁荣,船舶球鼻艏的磨损和腐蚀问题日益突出。为了解决这一问题,本研究对船舶球鼻艏的换新工艺方法进行了研究。通过对球鼻艏的磨损和腐蚀原因进行分析,我们提出了一种新的换新工艺方法,既能够延长球鼻艏的使用寿命,又可以提高船舶的安全性能。1.引言船舶球鼻艏是船舶前端设备的重要组成部分,承担着减低船舶阻力、提高船舶航行安全性能的重要任务。然而,由于海水的腐蚀和颠簸的程度日益加大,船舶球鼻艏上的磨损和腐蚀问题持续存在,给航运

基于Grasshopper的参数化球鼻艏生成方法.docx
基于Grasshopper的参数化球鼻艏生成方法基于Grasshopper的参数化球鼻艏生成方法摘要球鼻艏是船舶设计中重要的部分,其形状对船舶的水动力性能和航行安全起到关键作用。本文探讨了基于Grasshopper的参数化球鼻艏生成方法,介绍了Grasshopper的基本概念和使用方法,并通过几个实例展示了球鼻艏形状的参数化设计步骤。通过Grasshopper的参数化设计工具,船舶设计师可以快速灵活地生成符合设计要求的球鼻艏形状。关键词:Grasshopper;参数化设计;球鼻艏;船舶设计引言球鼻艏是船舶
一种自适应变形的组合井盖装置及其安装方法.pdf
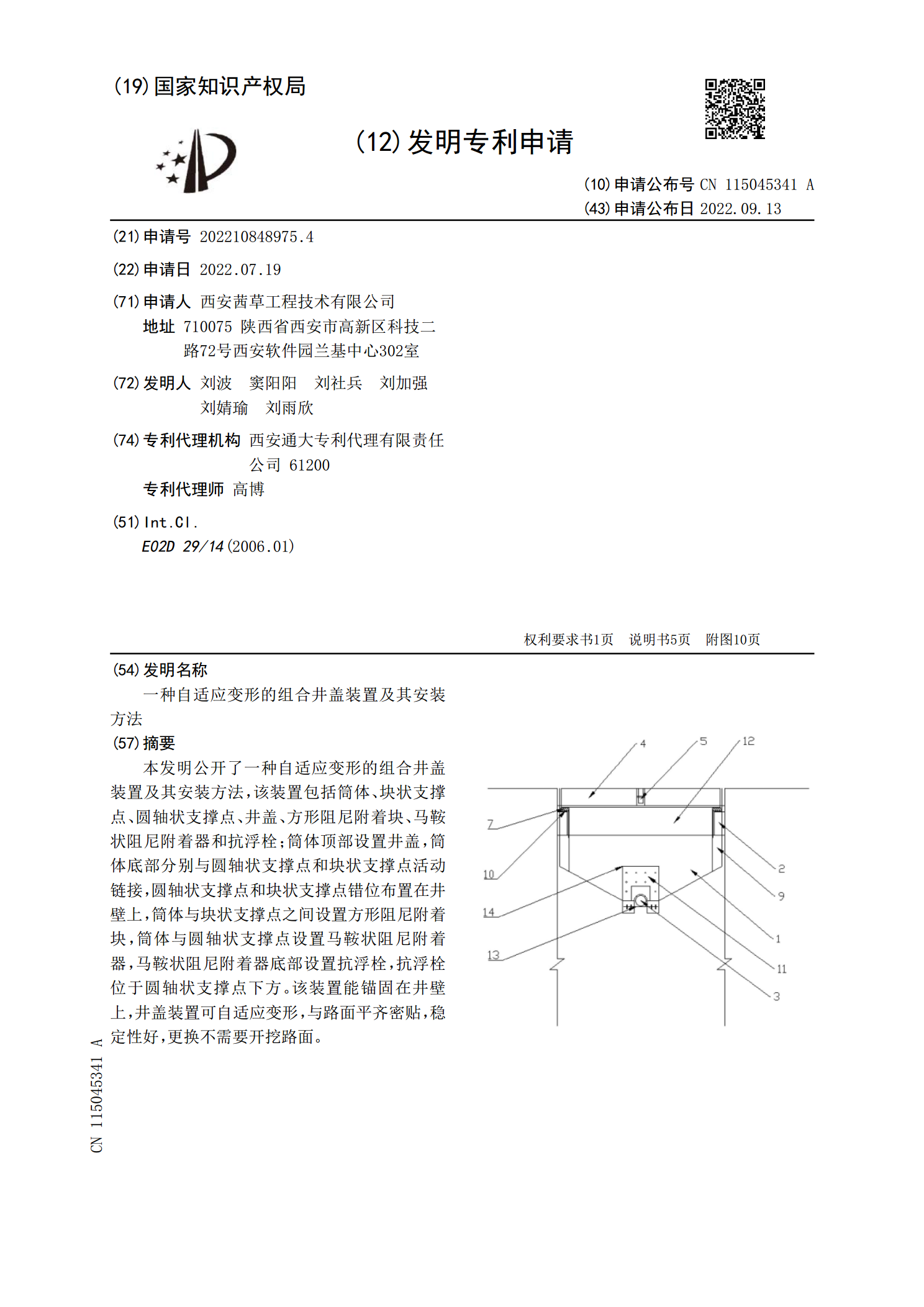
本发明公开了一种自适应变形的组合井盖装置及其安装方法,该装置包括筒体、块状支撑点、圆轴状支撑点、井盖、方形阻尼附着块、马鞍状阻尼附着器和抗浮栓;筒体顶部设置井盖,筒体底部分别与圆轴状支撑点和块状支撑点活动链接,圆轴状支撑点和块状支撑点错位布置在井壁上,筒体与块状支撑点之间设置方形阻尼附着块,筒体与圆轴状支撑点设置马鞍状阻尼附着器,马鞍状阻尼附着器底部设置抗浮栓,抗浮栓位于圆轴状支撑点下方。该装置能锚固在井壁上,井盖装置可自适应变形,与路面平齐密贴,稳定性好,更换不需要开挖路面。