
一种无人船用采样装置及其采样方法.pdf

一吃****仕龙


1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人船用采样装置及其采样方法.pdf
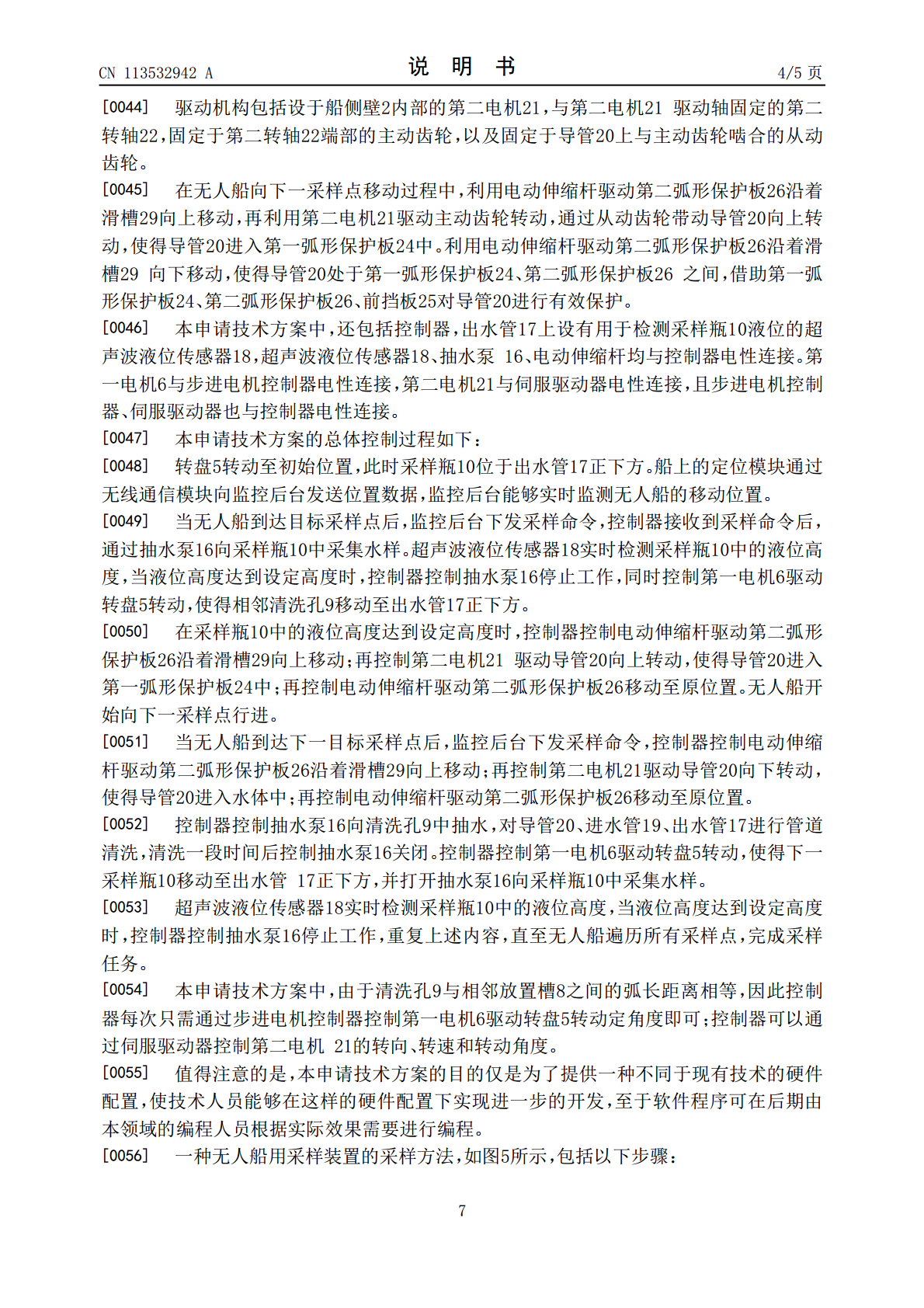
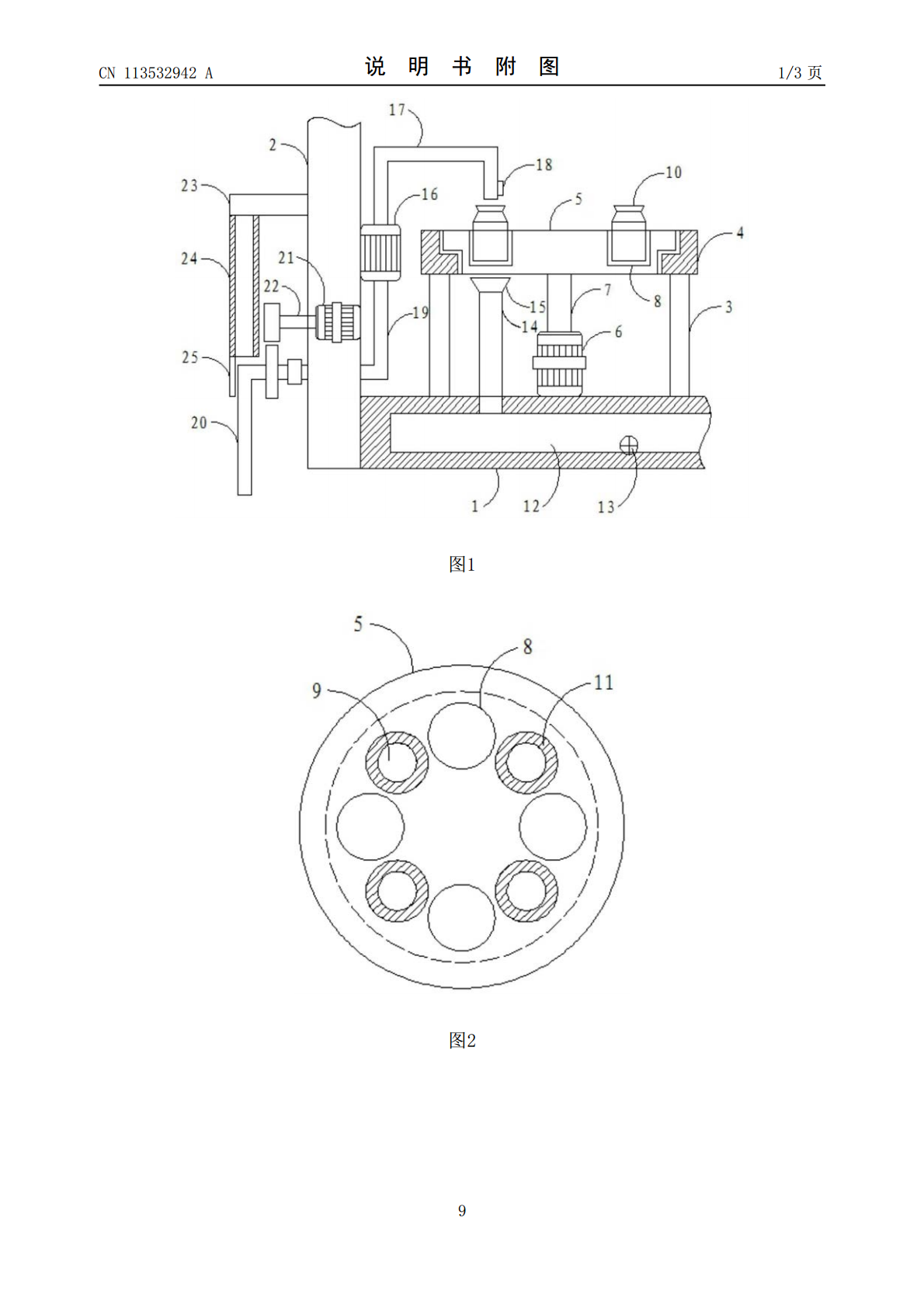
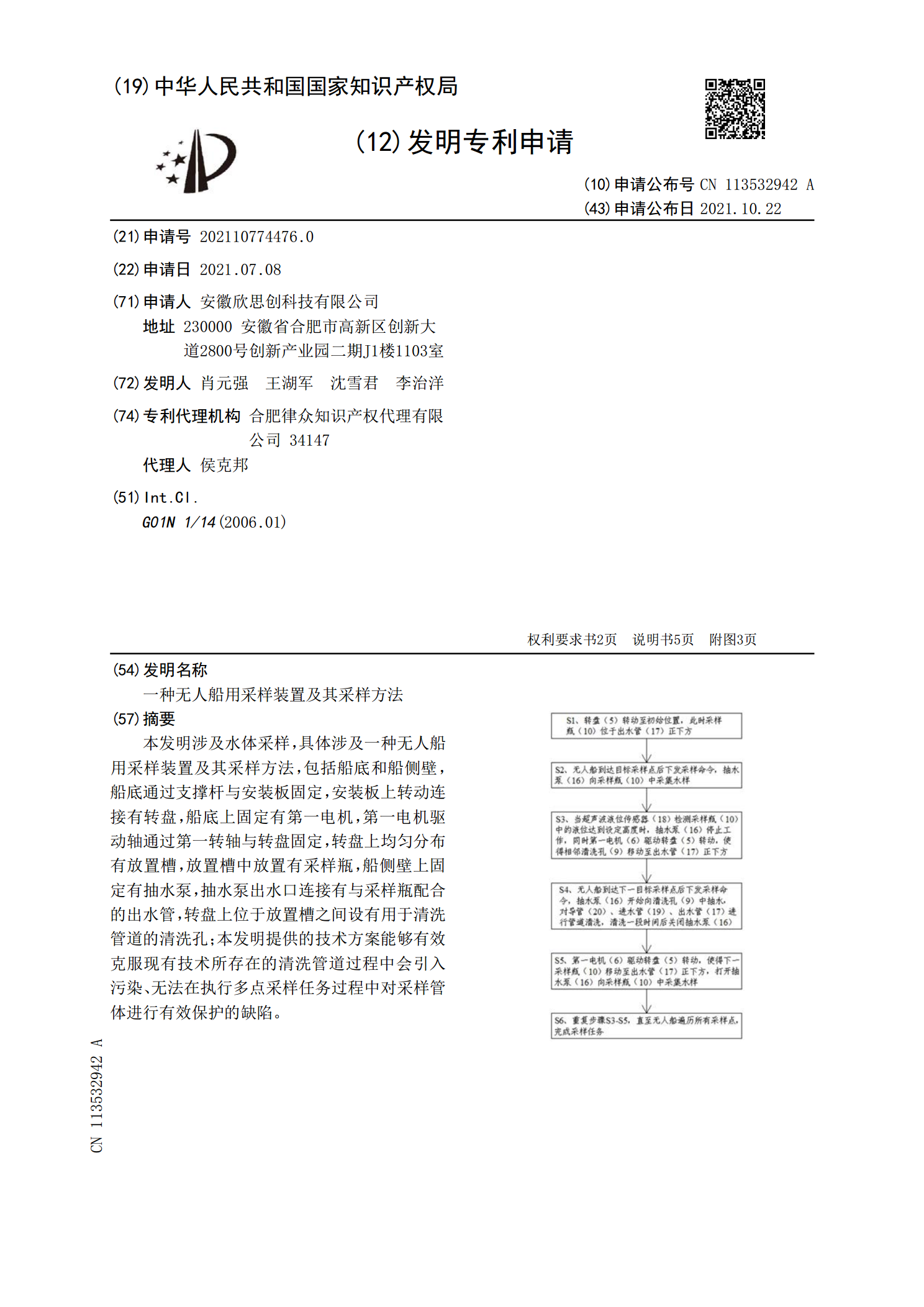
本发明涉及水体采样,具体涉及一种无人船用采样装置及其采样方法,包括船底和船侧壁,船底通过支撑杆与安装板固定,安装板上转动连接有转盘,船底上固定有第一电机,第一电机驱动轴通过第一转轴与转盘固定,转盘上均匀分布有放置槽,放置槽中放置有采样瓶,船侧壁上固定有抽水泵,抽水泵出水口连接有与采样瓶配合的出水管,转盘上位于放置槽之间设有用于清洗管道的清洗孔;本发明提供的技术方案能够有效克服现有技术所存在的清洗管道过程中会引入污染、无法在执行多点采样任务过程中对采样管体进行有效保护的缺陷。
一种无人船自动采样装置.pdf
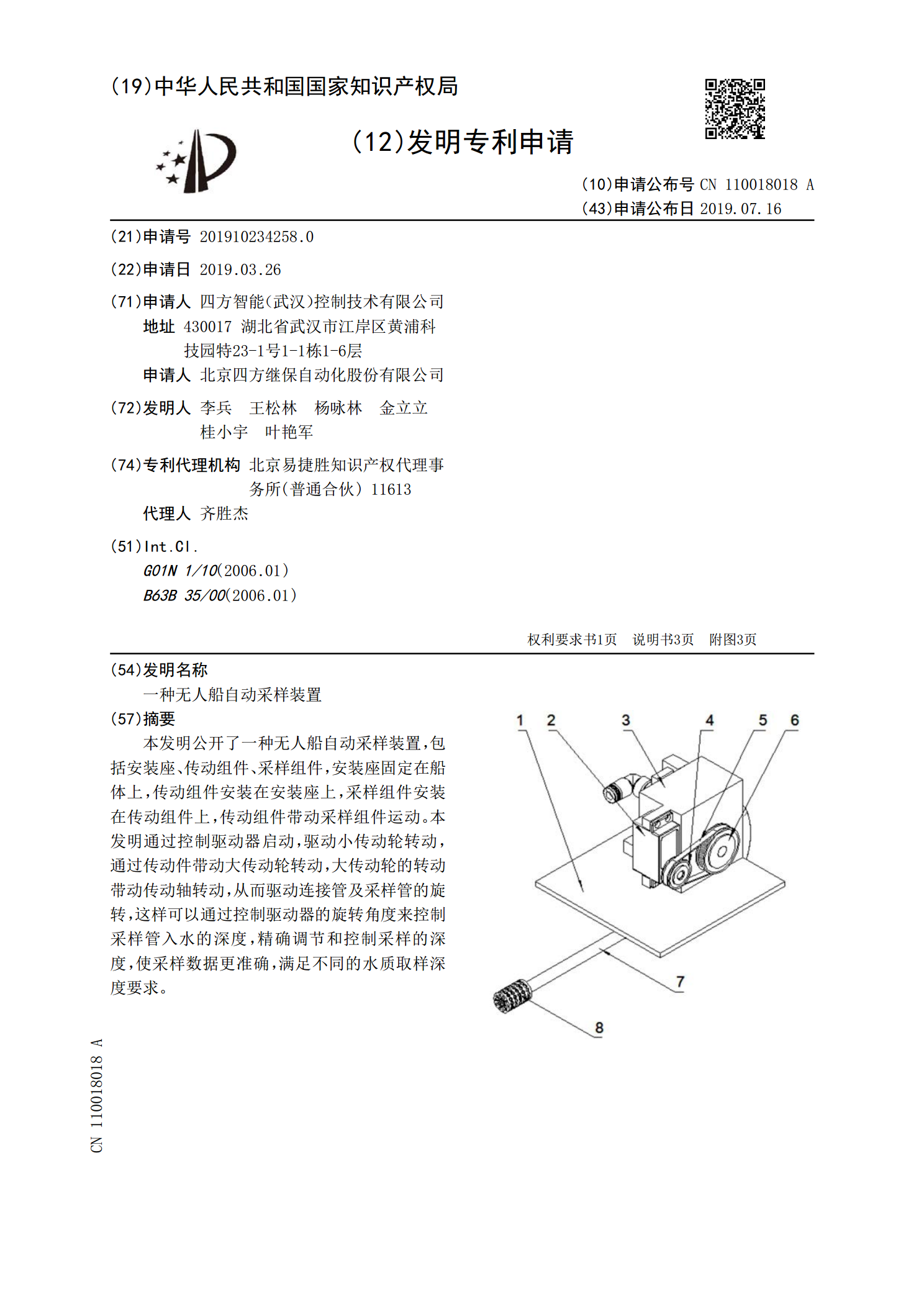
本发明公开了一种无人船自动采样装置,包括安装座、传动组件、采样组件,安装座固定在船体上,传动组件安装在安装座上,采样组件安装在传动组件上,传动组件带动采样组件运动。本发明通过控制驱动器启动,驱动小传动轮转动,通过传动件带动大传动轮转动,大传动轮的转动带动传动轴转动,从而驱动连接管及采样管的旋转,这样可以通过控制驱动器的旋转角度来控制采样管入水的深度,精确调节和控制采样的深度,使采样数据更准确,满足不同的水质取样深度要求。

防交叉污染的水质采样无人船及无人船水质采样方法.pdf
本发明涉及无人船水质采样领域,具体涉及防交叉污染的水质采样无人船及无人船水质采样方法。包括船体,所述船体内设有导航定位模块、驱动模块和机电控制模块,所述船体内还设有抽水装置和存样仓,所述抽水装置向船体外延伸设有取样管,所述抽水装置还包括出水导管,所述出水导管延伸进入存样仓,所述存样仓内设有水样收集装置、出水管导向装置和排水口。通过将船体驱动到达待采集水域,抽取该水域的水先将抽水装置、取样管以及出水导管内腔进行清洗,并从排水口排出,完成清洗后,再进行收集,以此保证进入水样收集瓶内的采集水不被管内残留的杂质以
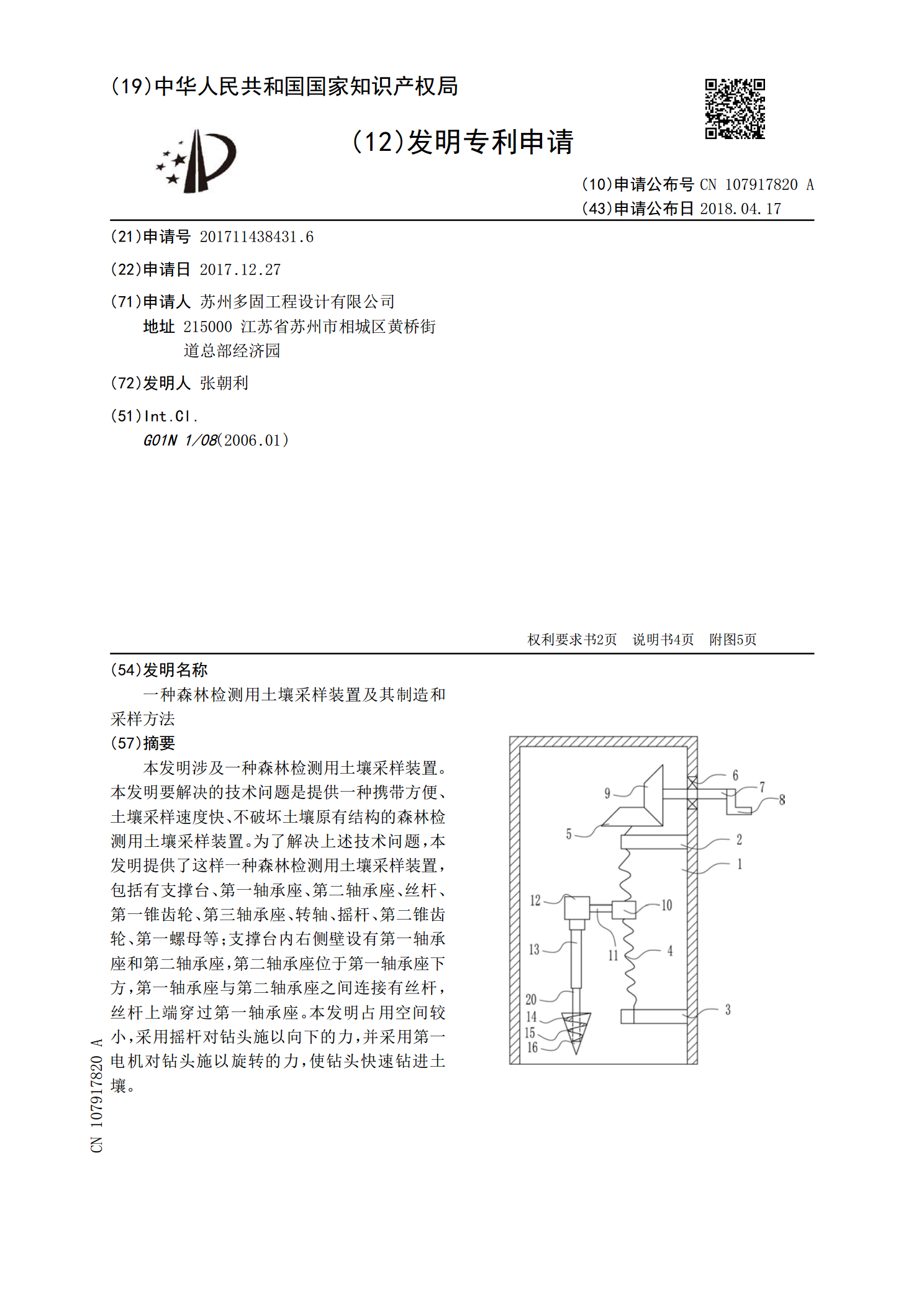
一种森林检测用土壤采样装置及其制造和采样方法.pdf
本发明涉及一种森林检测用土壤采样装置。本发明要解决的技术问题是提供一种携带方便、土壤采样速度快、不破坏土壤原有结构的森林检测用土壤采样装置。为了解决上述技术问题,本发明提供了这样一种森林检测用土壤采样装置,包括有支撑台、第一轴承座、第二轴承座、丝杆、第一锥齿轮、第三轴承座、转轴、摇杆、第二锥齿轮、第一螺母等;支撑台内右侧壁设有第一轴承座和第二轴承座,第二轴承座位于第一轴承座下方,第一轴承座与第二轴承座之间连接有丝杆,丝杆上端穿过第一轴承座。本发明占用空间较小,采用摇杆对钻头施以向下的力,并采用第一电机对钻
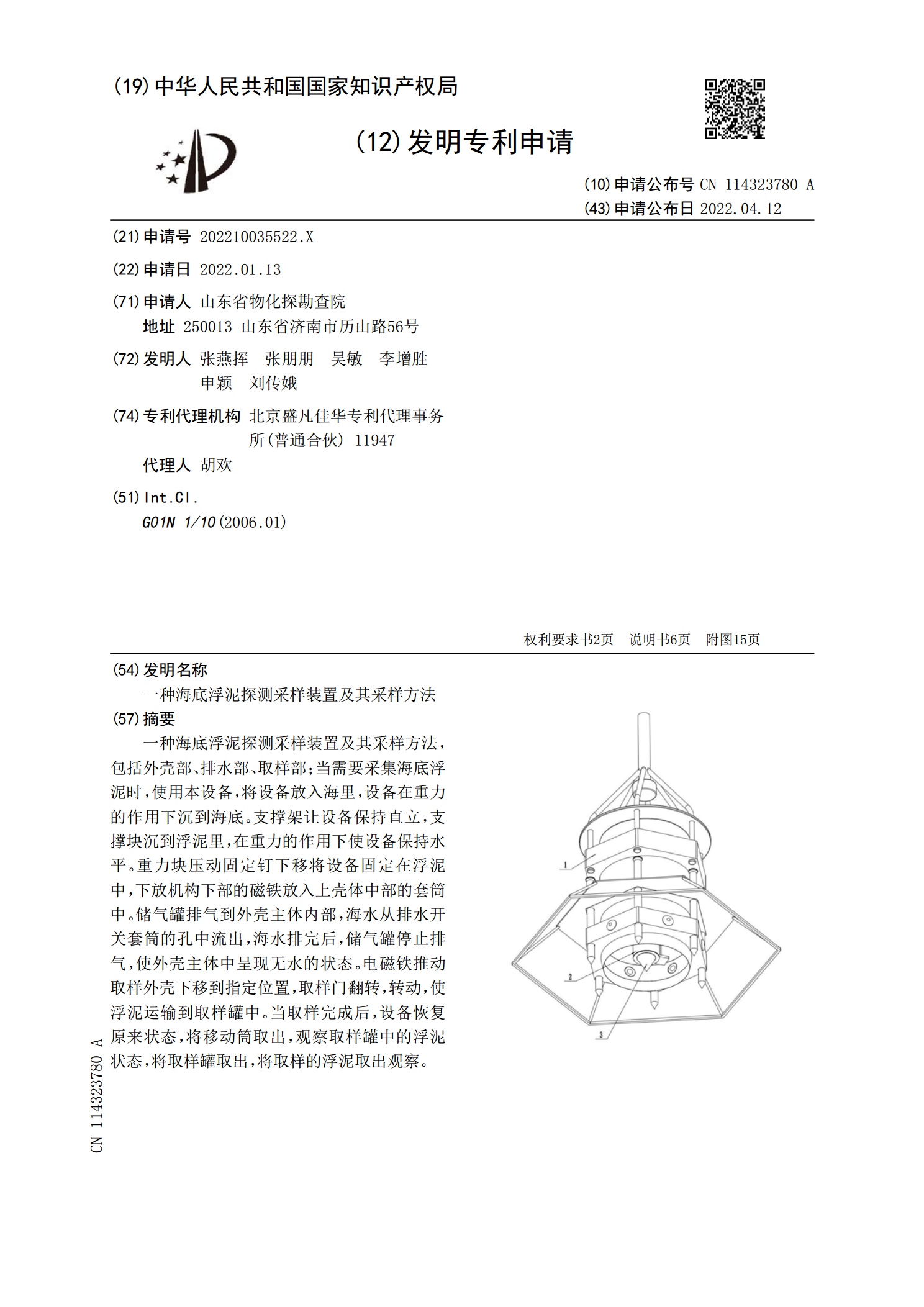
一种海底浮泥探测采样装置及其采样方法.pdf
一种海底浮泥探测采样装置及其采样方法,包括外壳部、排水部、取样部;当需要采集海底浮泥时,使用本设备,将设备放入海里,设备在重力的作用下沉到海底。支撑架让设备保持直立,支撑块沉到浮泥里,在重力的作用下使设备保持水平。重力块压动固定钉下移将设备固定在浮泥中,下放机构下部的磁铁放入上壳体中部的套筒中。储气罐排气到外壳主体内部,海水从排水开关套筒的孔中流出,海水排完后,储气罐停止排气,使外壳主体中呈现无水的状态。电磁铁推动取样外壳下移到指定位置,取样门翻转,转动,使浮泥运输到取样罐中。当取样完成后,设备恢复原来状