
一种可移动式焊接机器人.pdf

一吃****成益

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种可移动式焊接机器人.pdf
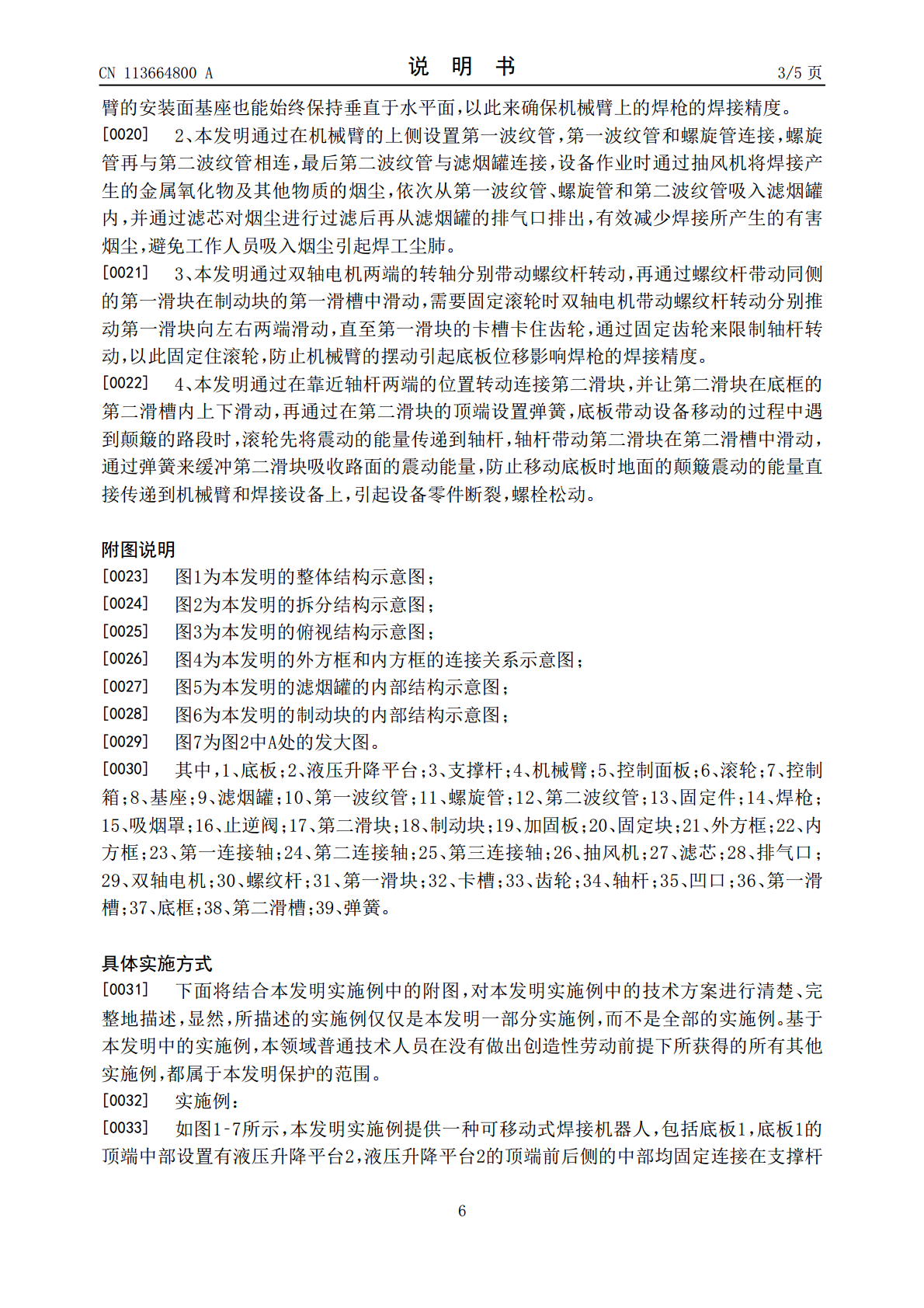
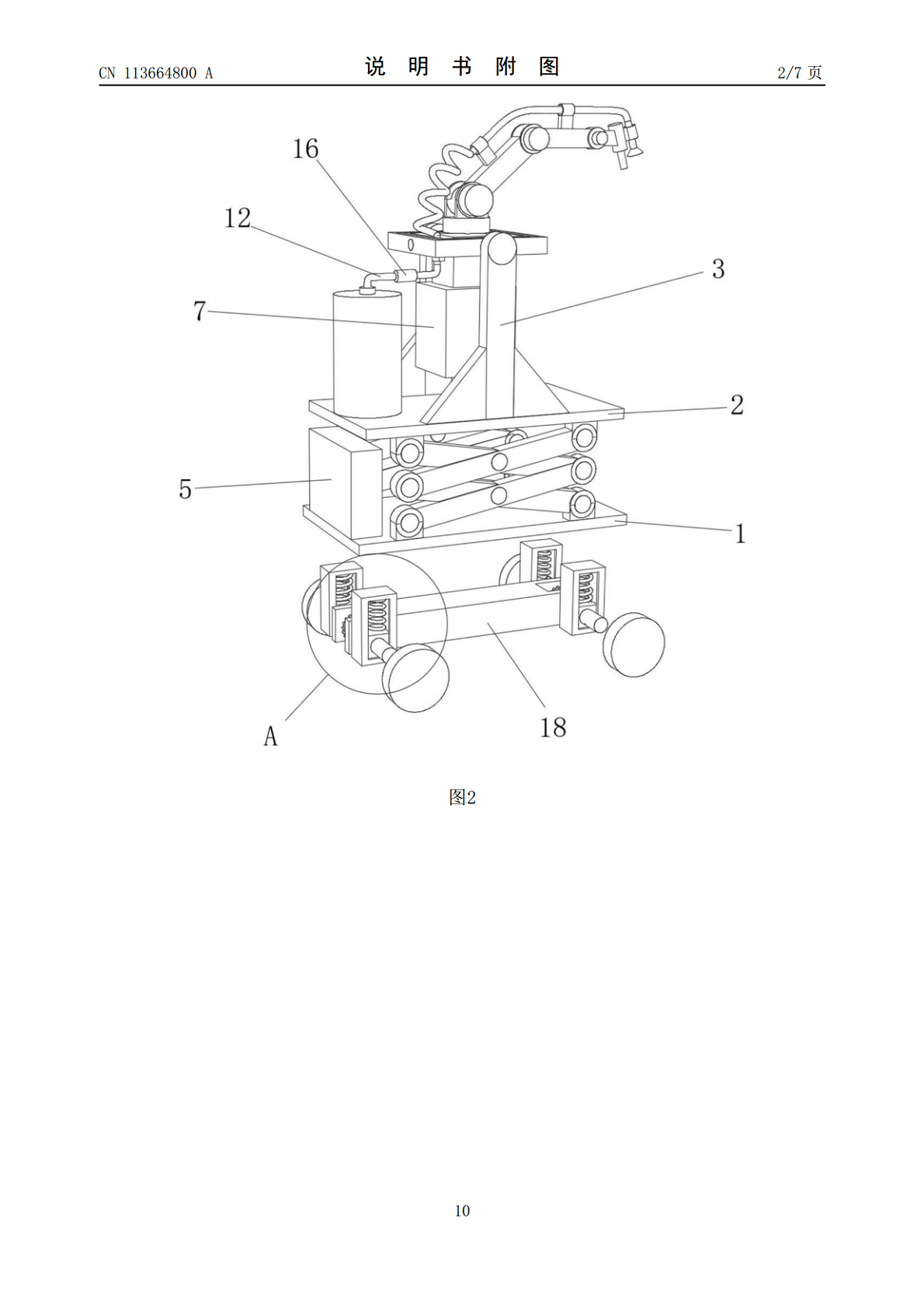
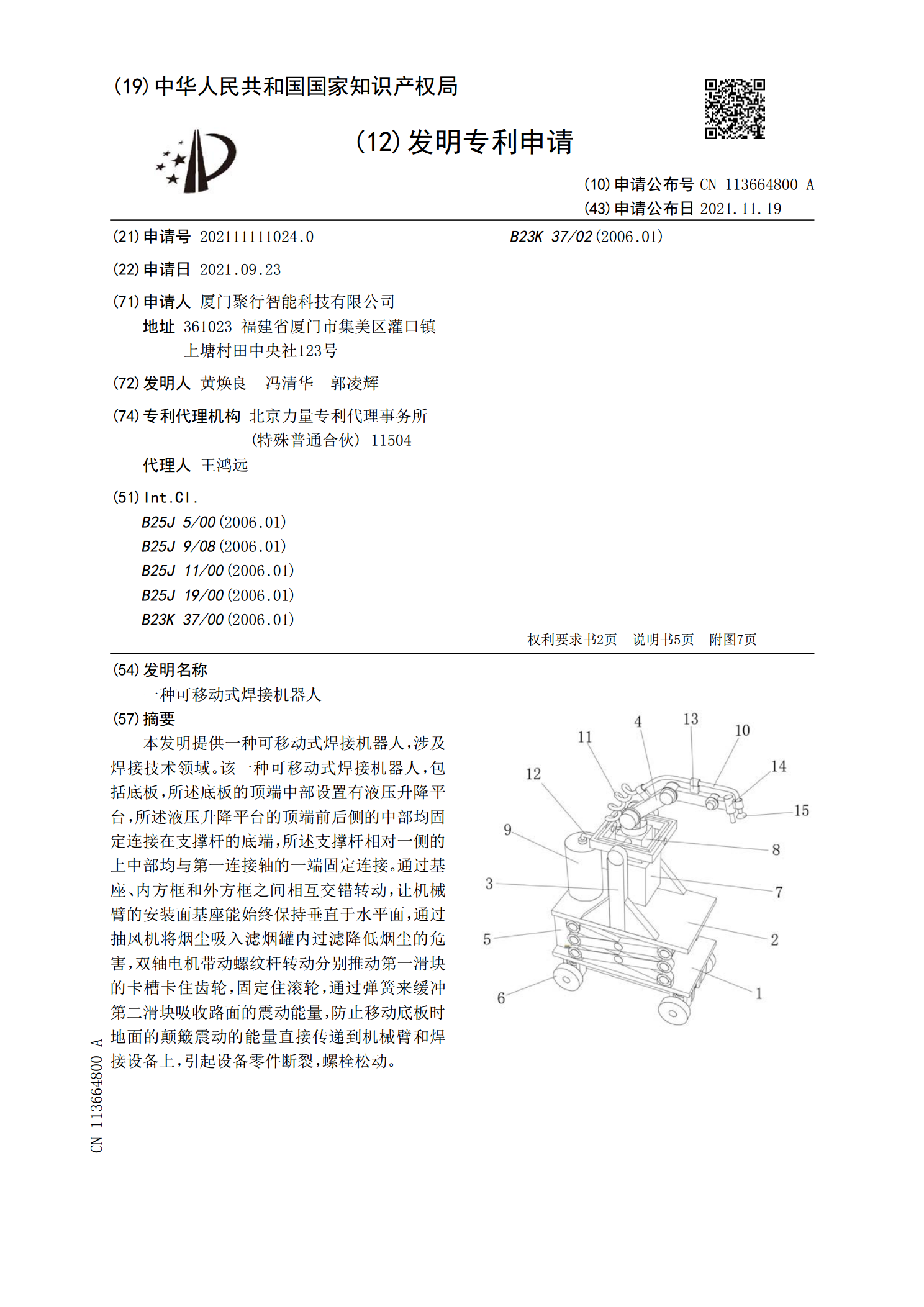
本发明提供一种可移动式焊接机器人,涉及焊接技术领域。该一种可移动式焊接机器人,包括底板,所述底板的顶端中部设置有液压升降平台,所述液压升降平台的顶端前后侧的中部均固定连接在支撑杆的底端,所述支撑杆相对一侧的上中部均与第一连接轴的一端固定连接。通过基座、内方框和外方框之间相互交错转动,让机械臂的安装面基座能始终保持垂直于水平面,通过抽风机将烟尘吸入滤烟罐内过滤降低烟尘的危害,双轴电机带动螺纹杆转动分别推动第一滑块的卡槽卡住齿轮,固定住滚轮,通过弹簧来缓冲第二滑块吸收路面的震动能量,防止移动底板时地面的颠簸震
一种用于超导焊接的可移动式焊接机器人.pdf
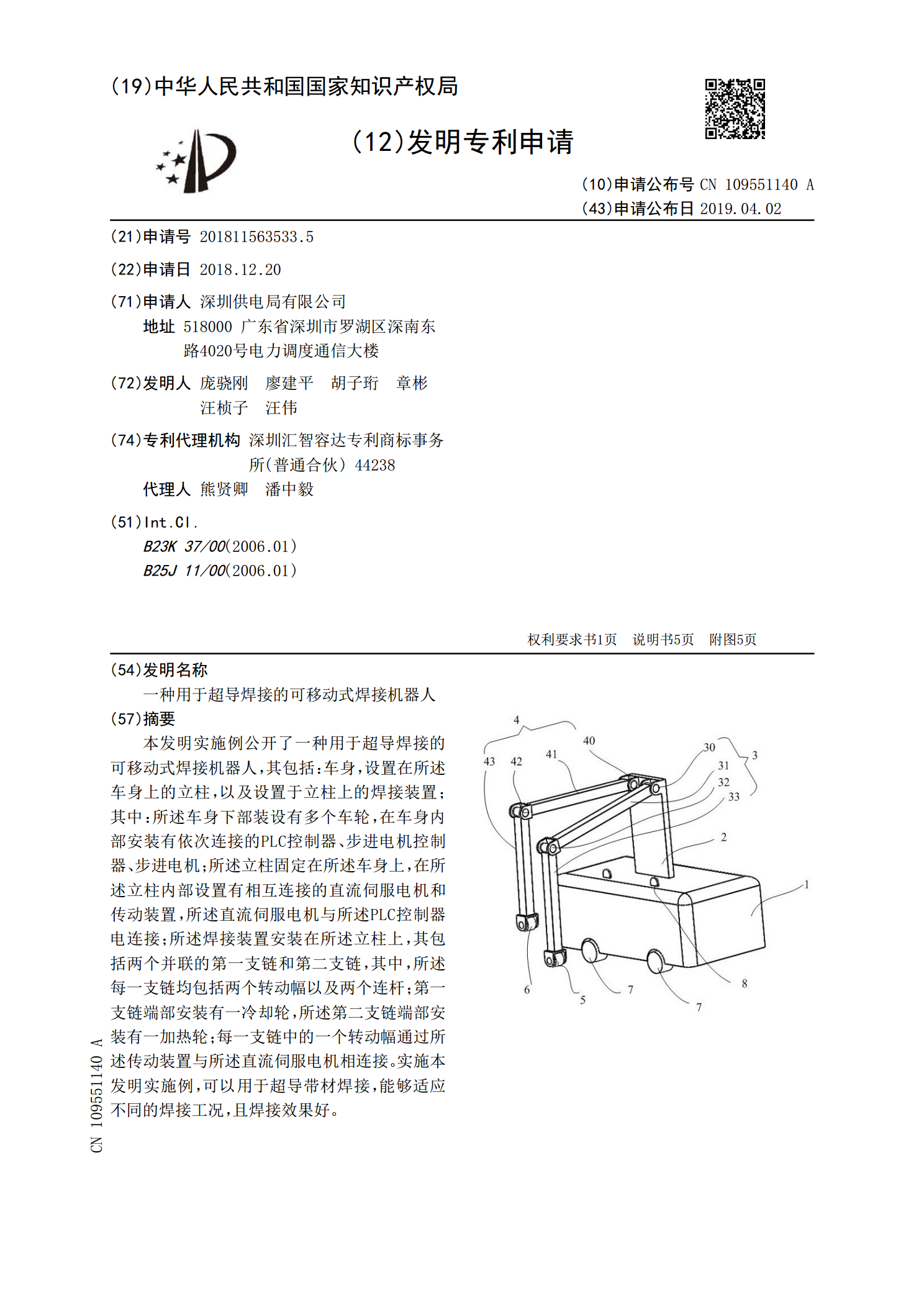
本发明实施例公开了一种用于超导焊接的可移动式焊接机器人,其包括:车身,设置在所述车身上的立柱,以及设置于立柱上的焊接装置;其中:所述车身下部装设有多个车轮,在车身内部安装有依次连接的PLC控制器、步进电机控制器、步进电机;所述立柱固定在所述车身上,在所述立柱内部设置有相互连接的直流伺服电机和传动装置,所述直流伺服电机与所述PLC控制器电连接;所述焊接装置安装在所述立柱上,其包括两个并联的第一支链和第二支链,其中,所述每一支链均包括两个转动幅以及两个连杆;第一支链端部安装有一冷却轮,所述第二支链端部安装有一
一种可移动式焊接设备.pdf
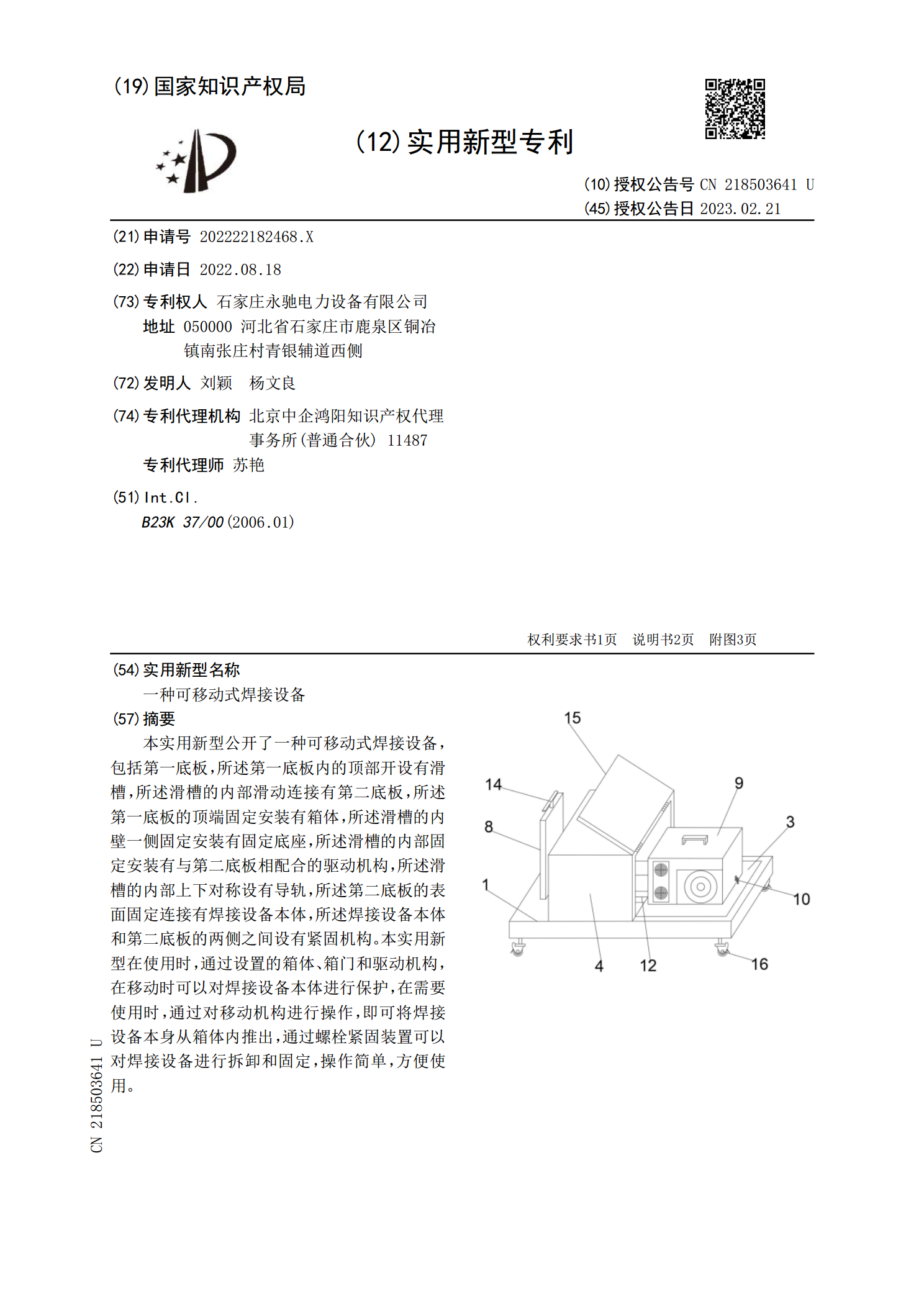
本实用新型公开了一种可移动式焊接设备,包括第一底板,所述第一底板内的顶部开设有滑槽,所述滑槽的内部滑动连接有第二底板,所述第一底板的顶端固定安装有箱体,所述滑槽的内壁一侧固定安装有固定底座,所述滑槽的内部固定安装有与第二底板相配合的驱动机构,所述滑槽的内部上下对称设有导轨,所述第二底板的表面固定连接有焊接设备本体,所述焊接设备本体和第二底板的两侧之间设有紧固机构。本实用新型在使用时,通过设置的箱体、箱门和驱动机构,在移动时可以对焊接设备本体进行保护,在需要使用时,通过对移动机构进行操作,即可将焊接设备本身
一种移动式焊接机器人.pdf
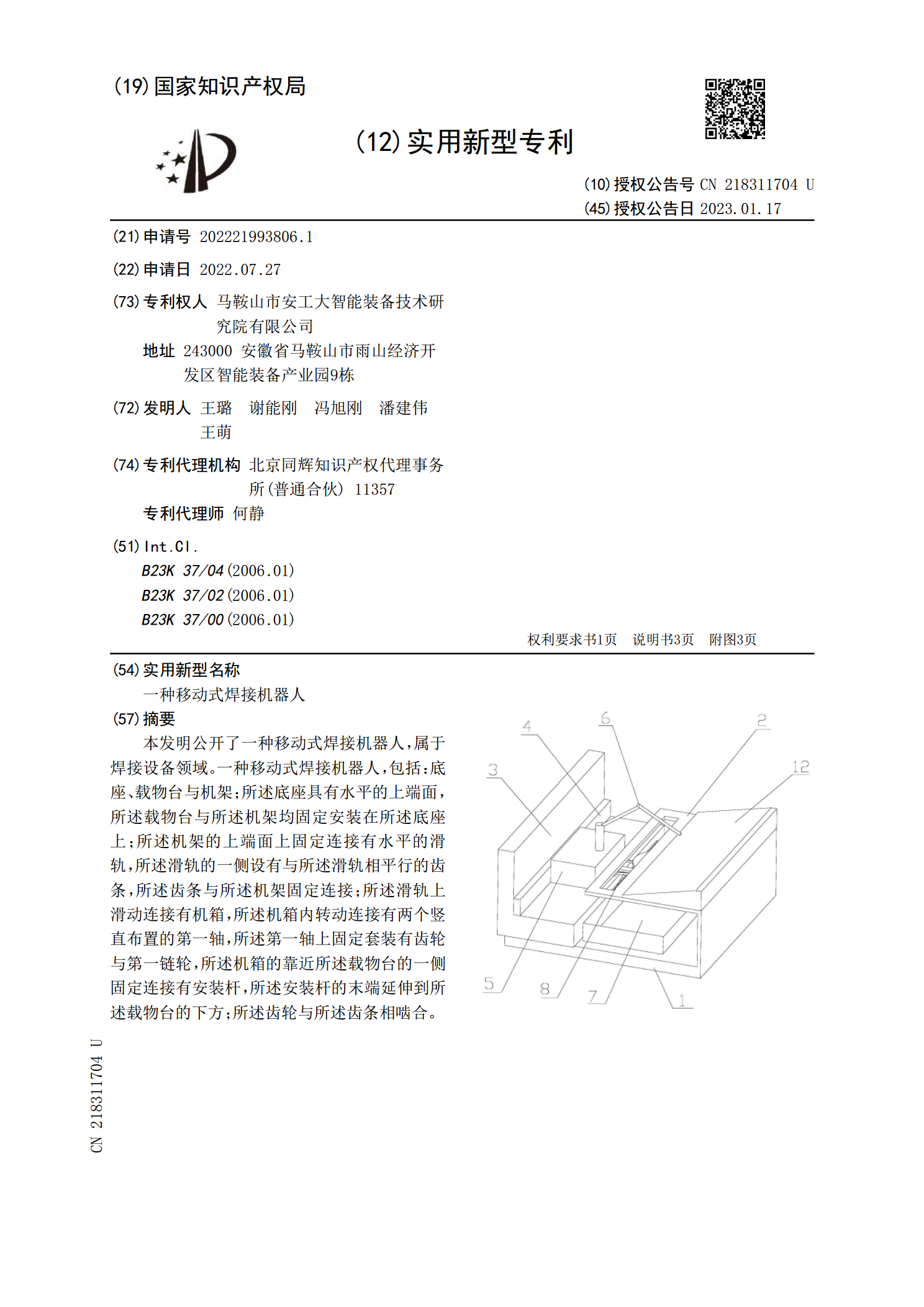
本发明公开了一种移动式焊接机器人,属于焊接设备领域。一种移动式焊接机器人,包括:底座、载物台与机架;所述底座具有水平的上端面,所述载物台与所述机架均固定安装在所述底座上;所述机架的上端面上固定连接有水平的滑轨,所述滑轨的一侧设有与所述滑轨相平行的齿条,所述齿条与所述机架固定连接;所述滑轨上滑动连接有机箱,所述机箱内转动连接有两个竖直布置的第一轴,所述第一轴上固定套装有齿轮与第一链轮,所述机箱的靠近所述载物台的一侧固定连接有安装杆,所述安装杆的末端延伸到所述载物台的下方;所述齿轮与所述齿条相啮合。

一种可移动式节气石英焊接车.pdf
本发明公开了一种可移动式节气石英焊接车,包括可旋转移动车身、操作面板和焊枪控制装置,所述可旋转移动车身设置有氢氧燃气罐存放台和转向装置,所述控制面板设置有氢氧气流量调节阀和氢氧气气压监测表,可调节燃气流量和监测燃气压力,所述焊枪控制装置能够自动调节焊接中途焊枪气焰量。通过对焊接过程中燃气使用量和燃气气压安全监测进行集成管理,并利用自动调节装置对焊枪气焰量进行控制,能够提高焊接安全性和便捷性,同时达到节气效果,避免燃气浪费。