
六足轮腿履混合移动机器人.pdf

努力****元恺


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

六足轮腿履混合移动机器人.pdf
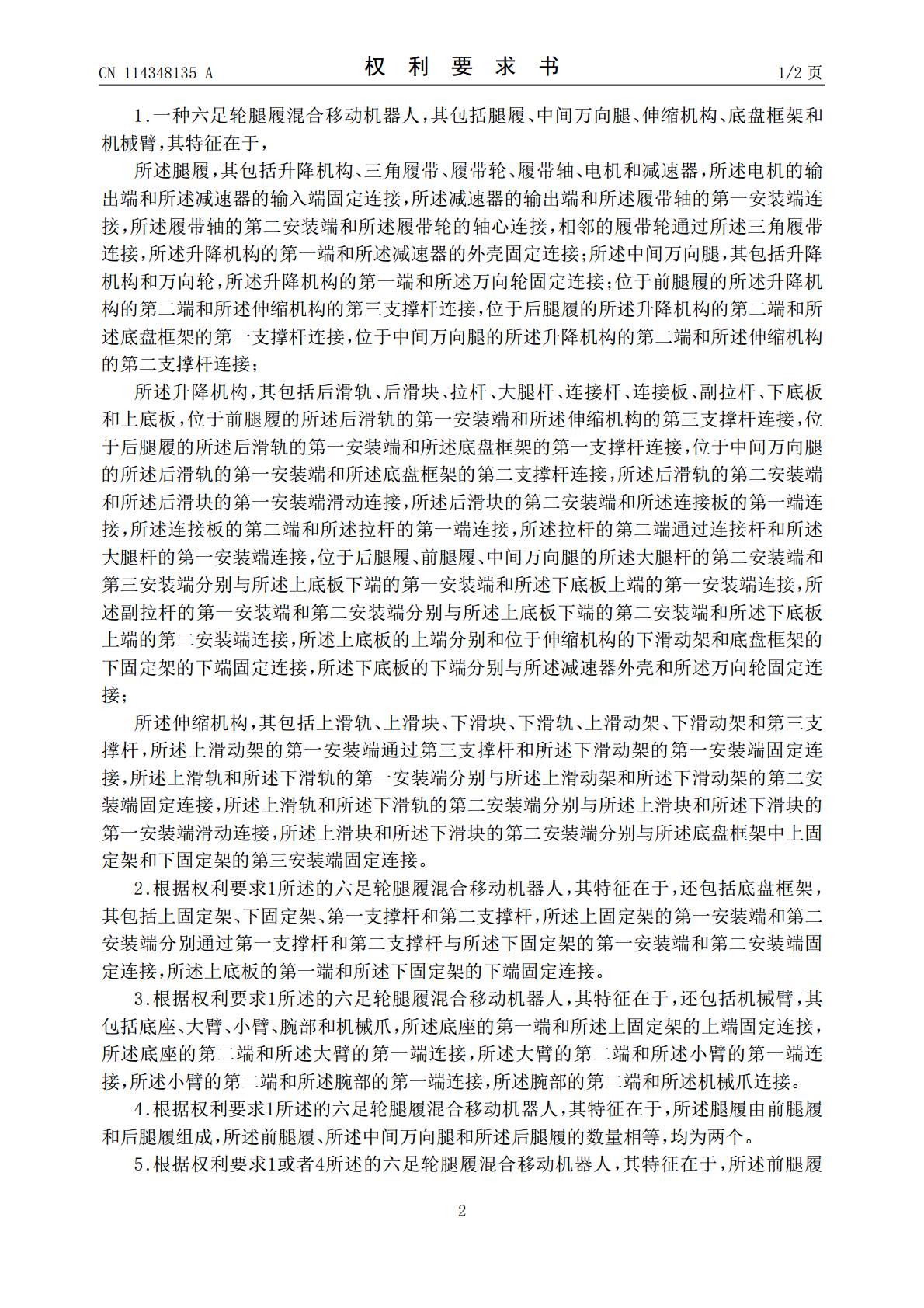
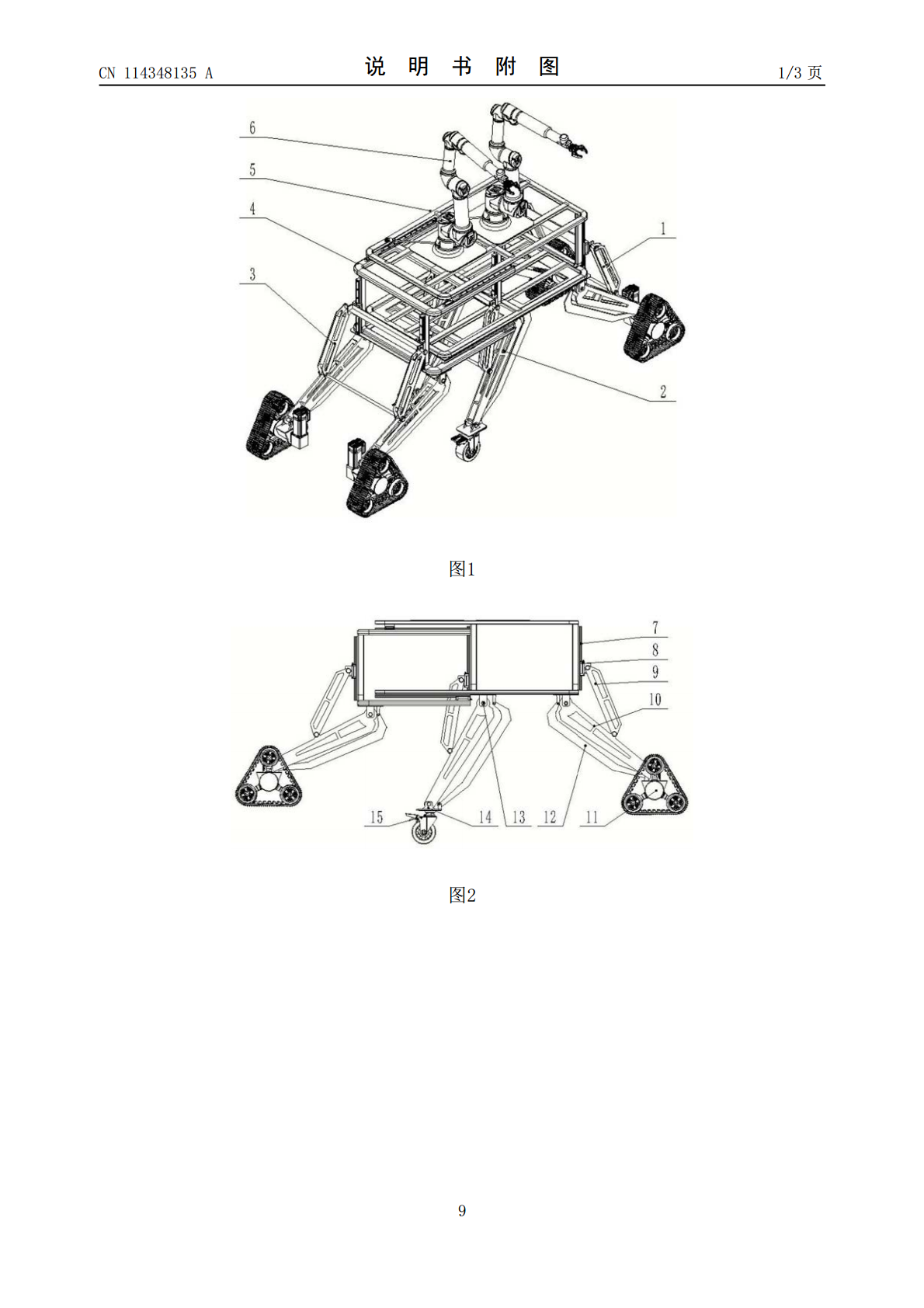
本发明提供一种六足轮腿履混合移动机器人,其包括腿履、中间万向腿、伸缩机构和底盘框架。位于前腿履的升降机构的第二端和伸缩机构的第三支撑杆连接,位于后腿履的升降机构的第二端和底盘框架的第一支撑杆连接,位于中间万向腿的升降机构的第二端和伸缩机构的第二支撑杆连接。在升降机构中,后滑轨的第二安装端和后滑块的第一安装端滑动连接,后滑块的第二安装端和连接板的第一端连接,连接板的第二端和拉杆的第一端连接,拉杆的第二端通过连接杆和大腿杆的第一安装端连接,大腿杆和副拉杆的安装端分别与上底板和下底板的安装端连接。本发明的升降机

轮履腿复合式移动机器人.pdf
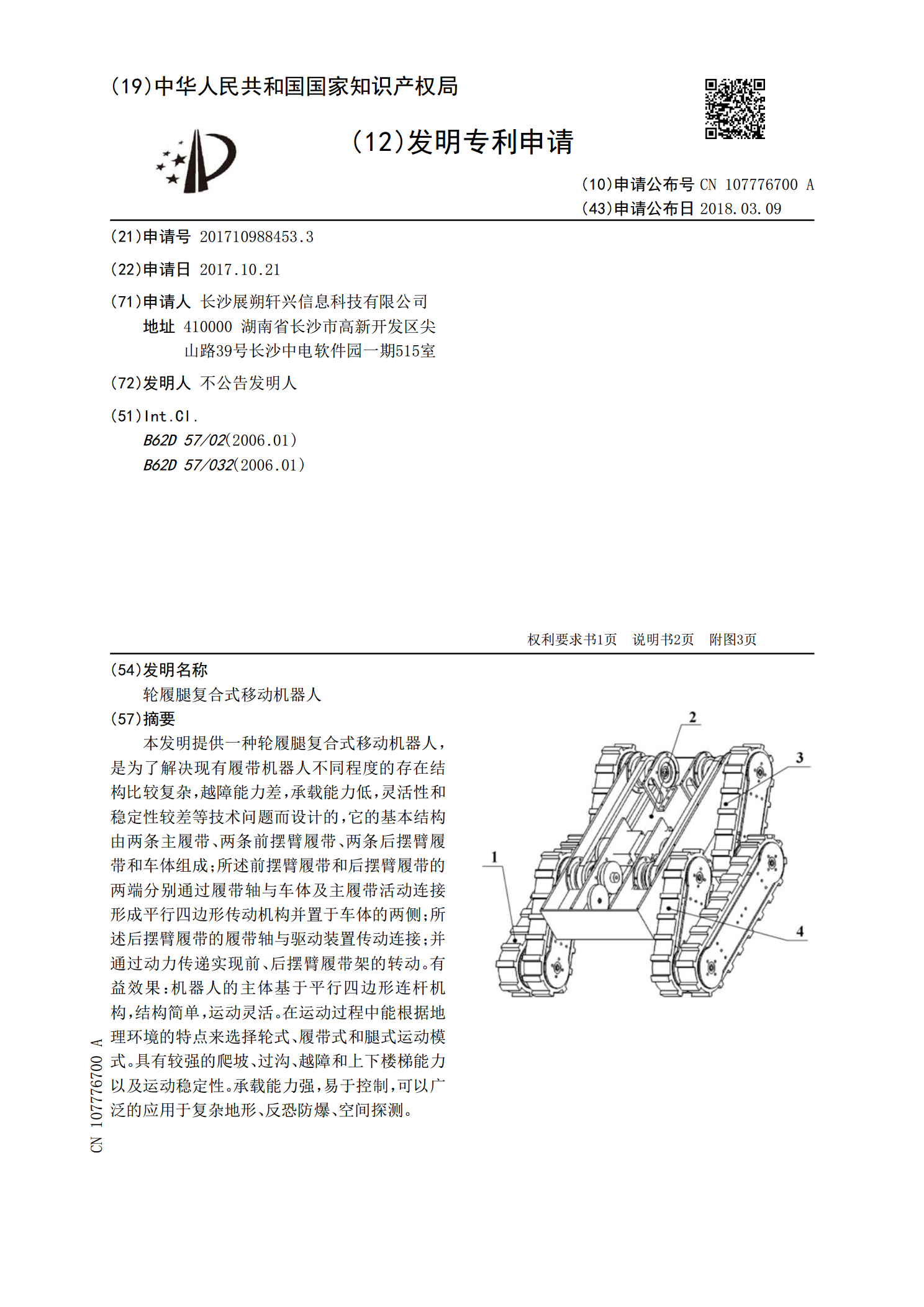
轮履腿复合式移动机器人,是为了解决现有履带机器人不同程度的存在结构比较复杂,越障能力差,承载能力低,灵活性和稳定性较差等技术问题而设计的,它的基本结构由两条主履带、两条前摆臂履带、两条后摆臂履带和车体组成;所述前摆臂履带和后摆臂履带的两端分别通过履带轴与车体及主履带活动连接形成平行四边形传动机构并置于车体的两侧;所述后摆臂履带的履带轴与驱动装置传动连接;并通过动力传递实现前、后摆臂履带架的转动。有益效果:机器人的主体基于平行四边形连杆机构,结构简单,运动灵活。在运动过程中能根据地理环境的特点来选择轮式、履
轮履腿复合式移动机器人.pdf
本发明提供一种轮履腿复合式移动机器人,是为了解决现有履带机器人不同程度的存在结构比较复杂,越障能力差,承载能力低,灵活性和稳定性较差等技术问题而设计的,它的基本结构由两条主履带、两条前摆臂履带、两条后摆臂履带和车体组成;所述前摆臂履带和后摆臂履带的两端分别通过履带轴与车体及主履带活动连接形成平行四边形传动机构并置于车体的两侧;所述后摆臂履带的履带轴与驱动装置传动连接;并通过动力传递实现前、后摆臂履带架的转动。有益效果:机器人的主体基于平行四边形连杆机构,结构简单,运动灵活。在运动过程中能根据地理环境的特点

轮履腿复合式移动机器人.pdf
本发明提供一种轮履腿复合式移动机器人,包括车架、履带臂、支撑腿、轮式升降机构,其中:履带臂通过内轴和外轴与车架相连接,四套履带臂对称分布于车架的四角;支撑腿通过支撑腿传动轴和车架相连接,两条支撑腿对称分布于车架的前后;轮式升降机构通过连接板与车架相连接,轮式升降机构设置在车架中部。本发明通过电机驱动履带臂、支撑腿和轮式升降机构运动,使机器人具有不同姿态,实现轮、履、腿复合运动方式,在越障能力上有很大提升。
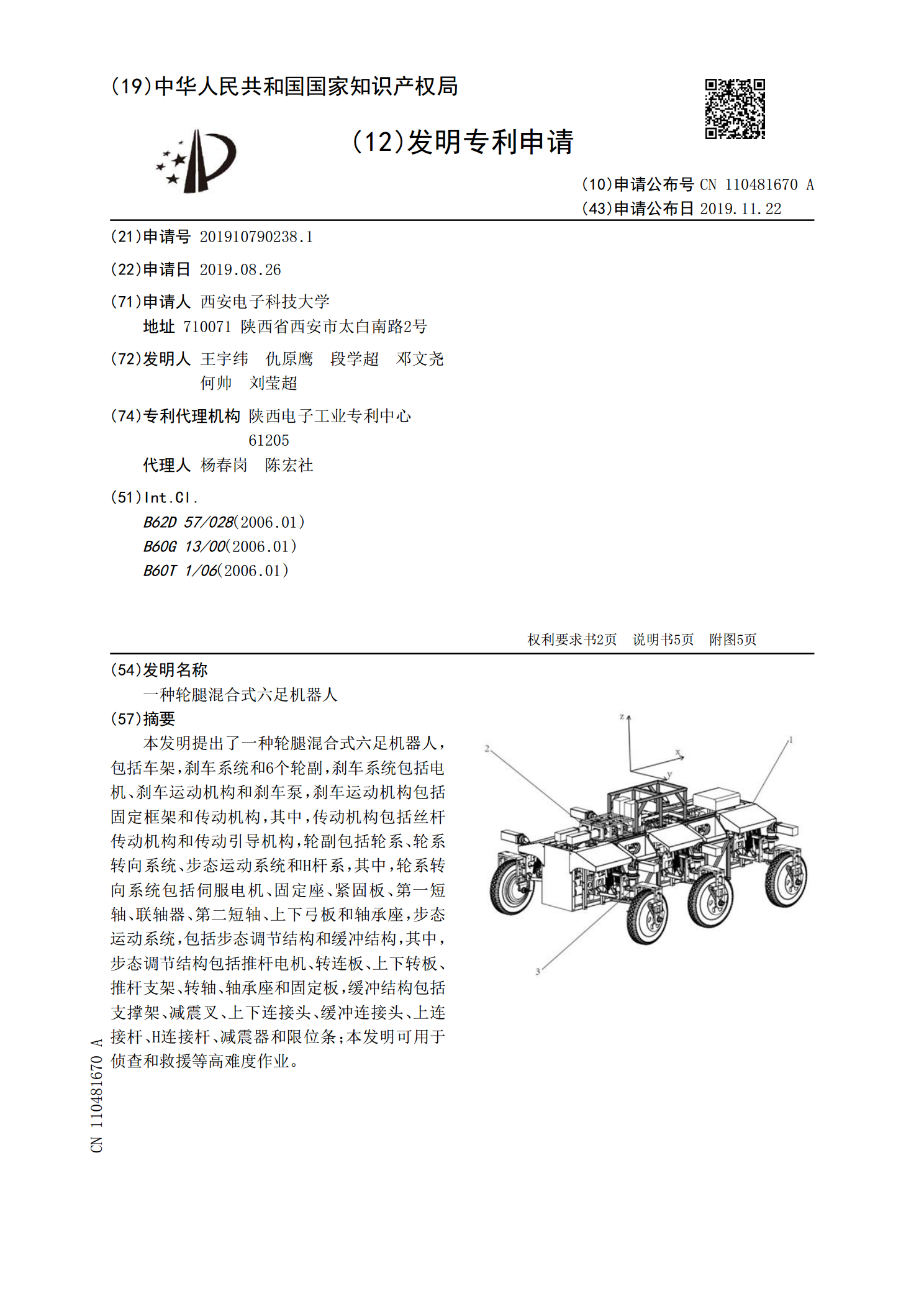
一种轮腿混合式六足机器人.pdf
本发明提出了一种轮腿混合式六足机器人,包括车架,刹车系统和6个轮副,刹车系统包括电机、刹车运动机构和刹车泵,刹车运动机构包括固定框架和传动机构,其中,传动机构包括丝杆传动机构和传动引导机构,轮副包括轮系、轮系转向系统、步态运动系统和H杆系,其中,轮系转向系统包括伺服电机、固定座、紧固板、第一短轴、联轴器、第二短轴、上下弓板和轴承座,步态运动系统,包括步态调节结构和缓冲结构,其中,步态调节结构包括推杆电机、转连板、上下转板、推杆支架、转轴、轴承座和固定板,缓冲结构包括支撑架、减震叉、上下连接头、缓冲连接头、