
一种双影像电缆沟道微型巡检机器人.pdf

是飞****文章

1/9
2/9
3/9

4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种双影像电缆沟道微型巡检机器人.pdf
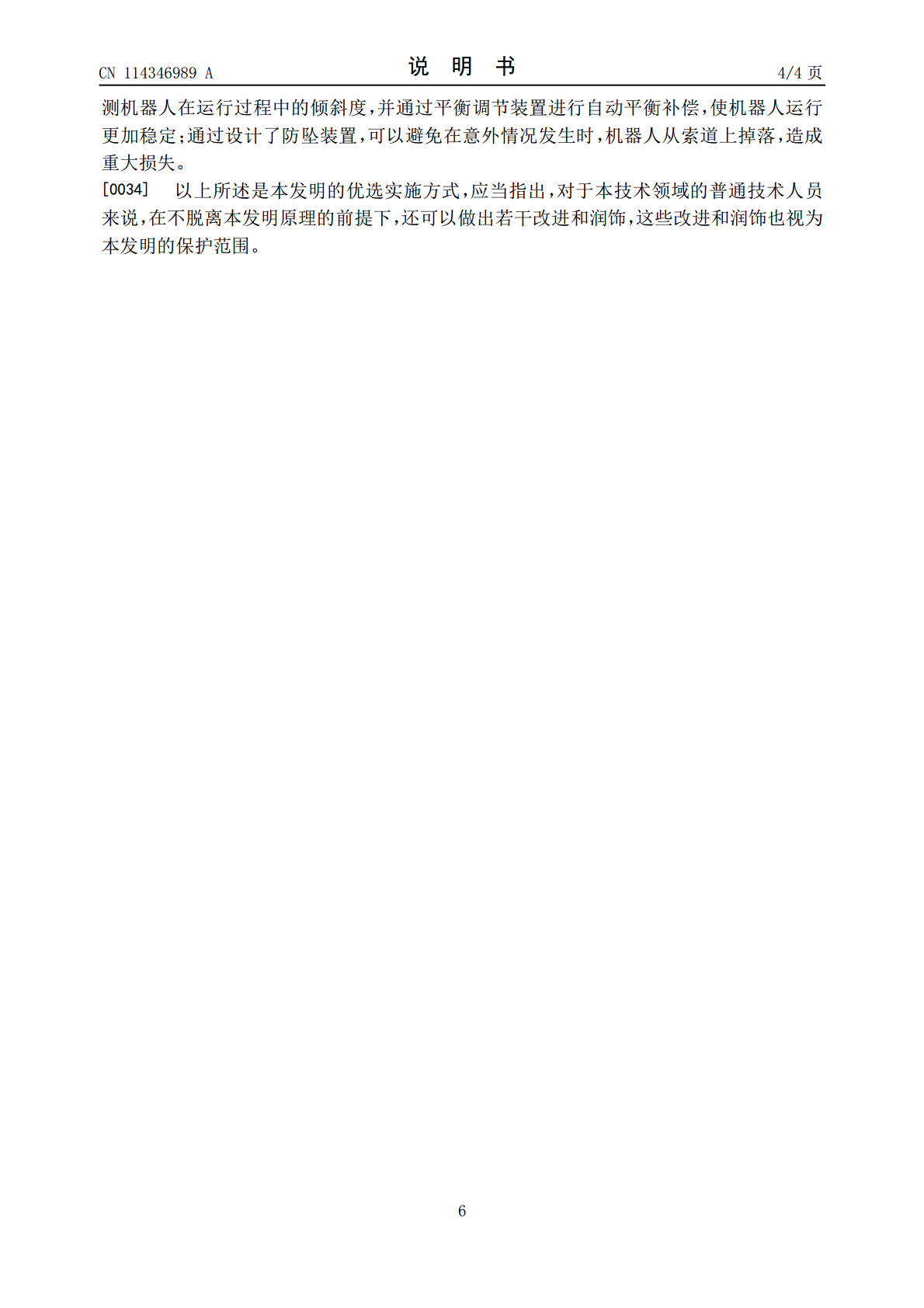
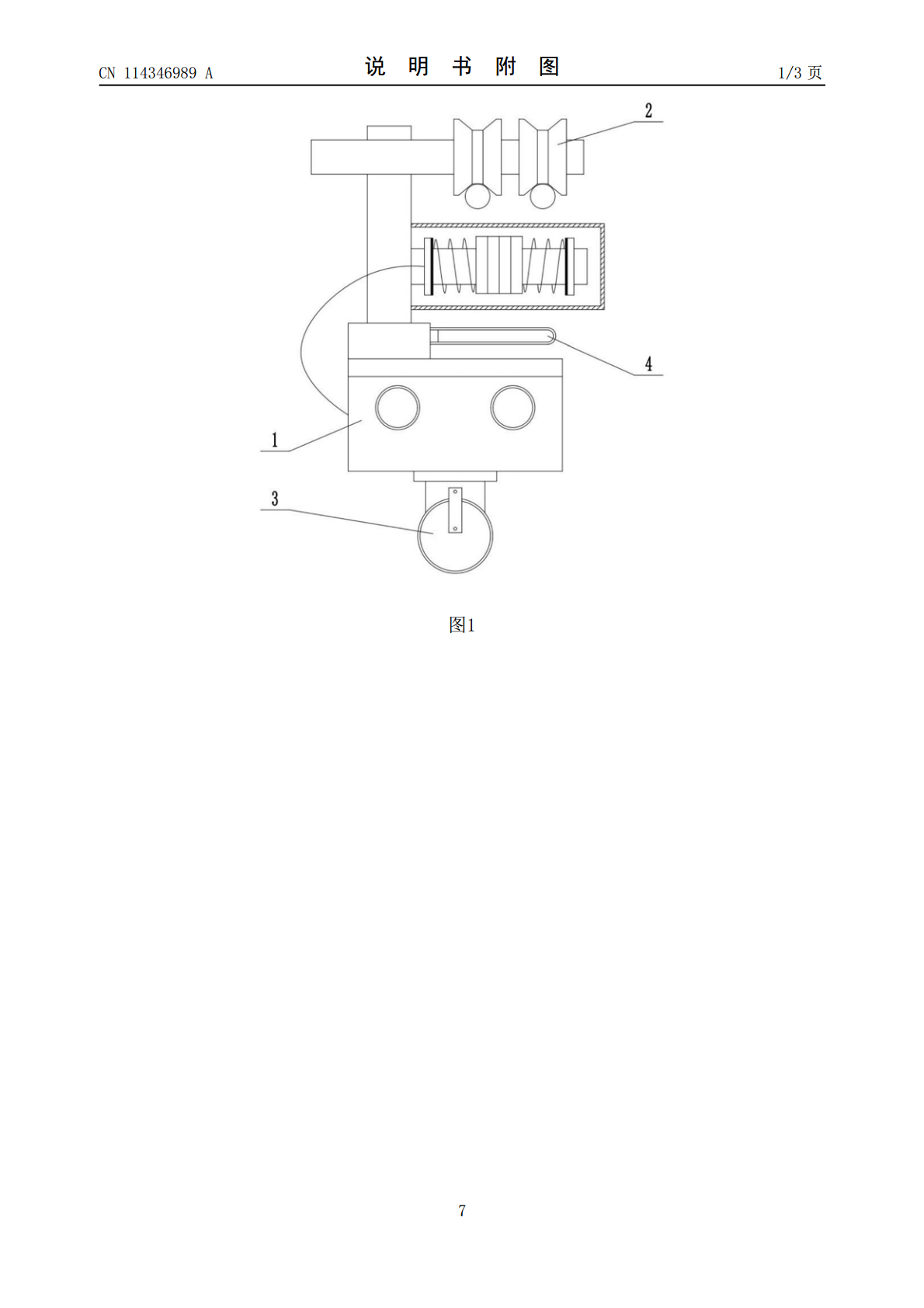
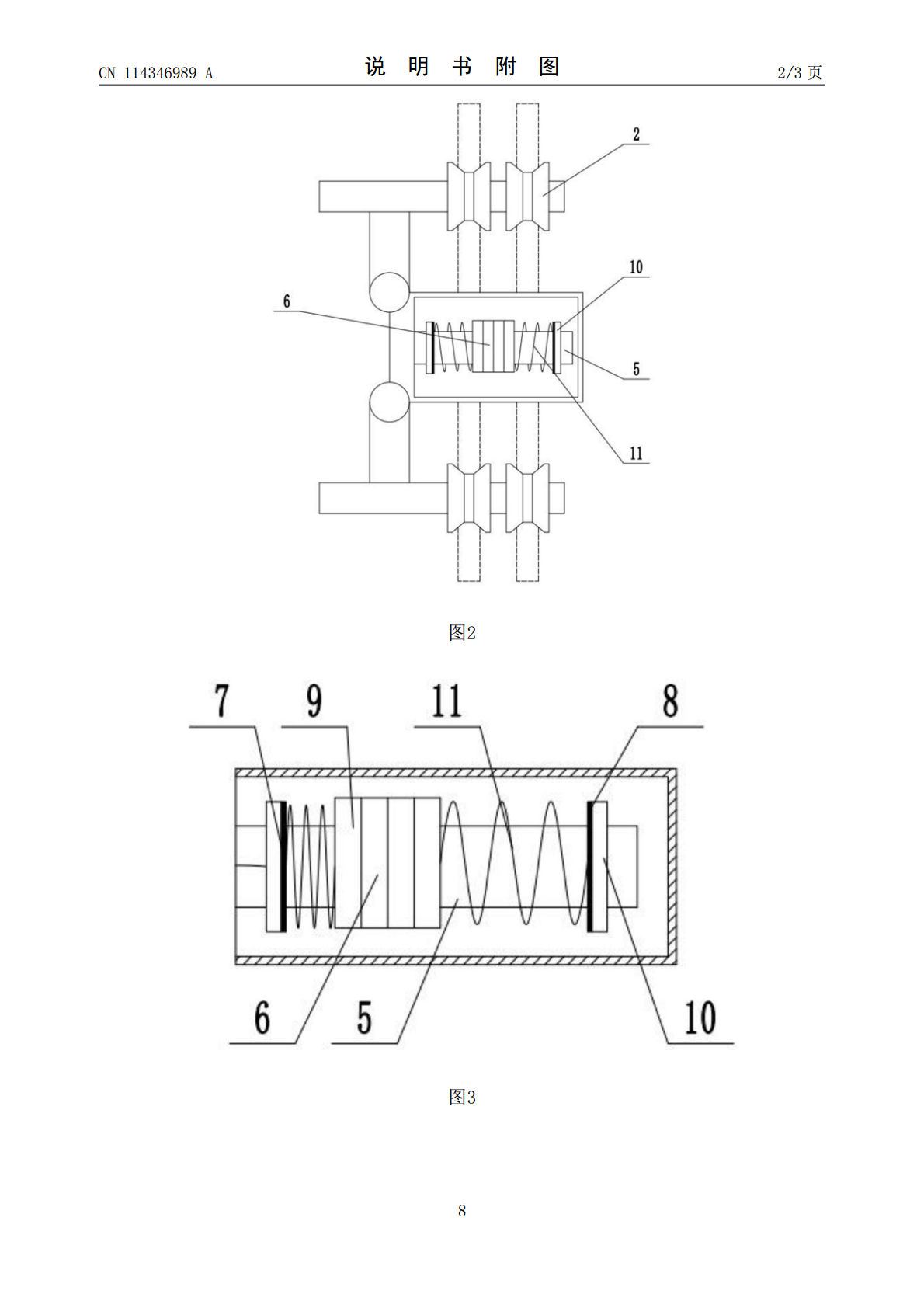
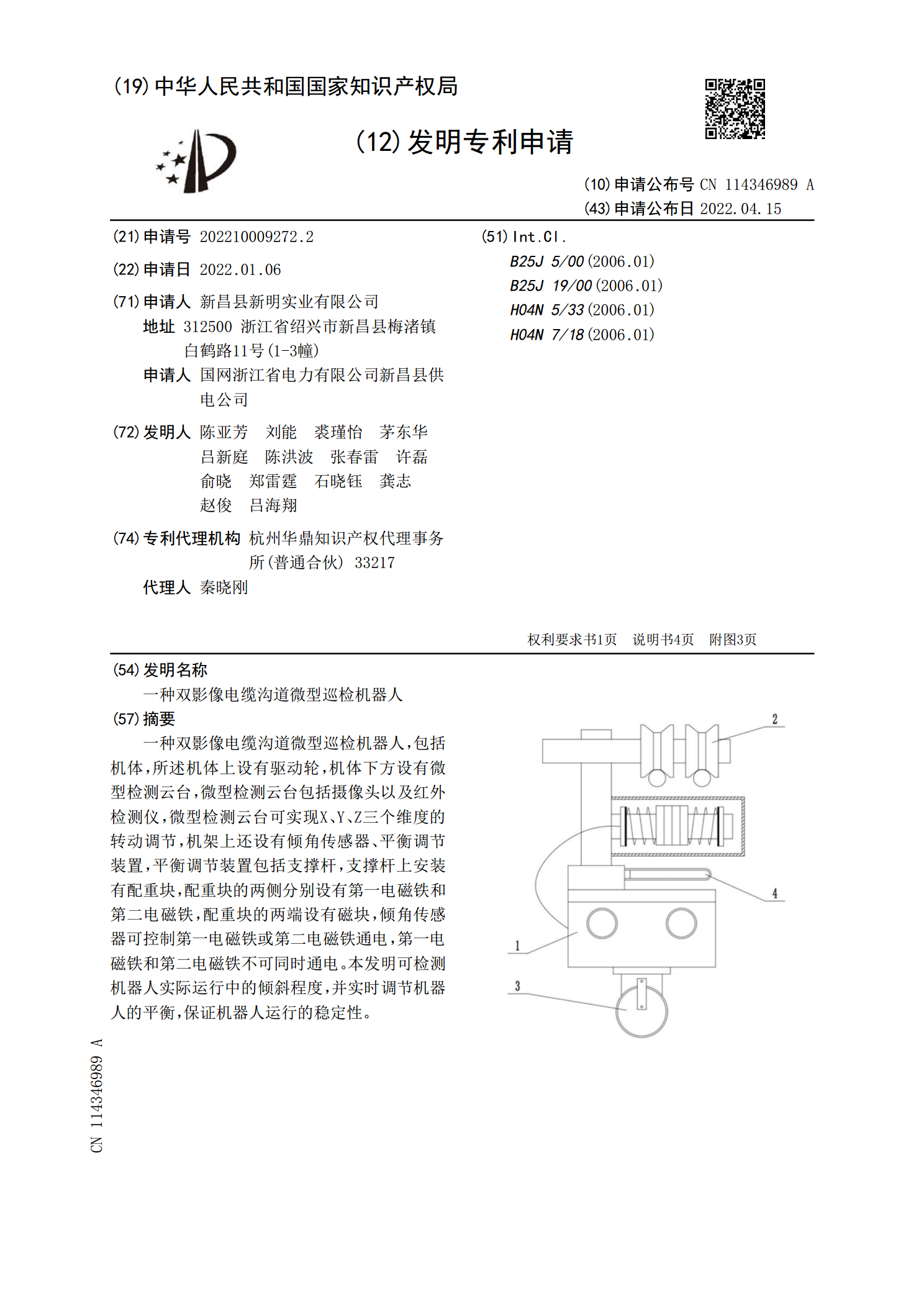
一种双影像电缆沟道微型巡检机器人,包括机体,所述机体上设有驱动轮,机体下方设有微型检测云台,微型检测云台包括摄像头以及红外检测仪,微型检测云台可实现X、Y、Z三个维度的转动调节,机架上还设有倾角传感器、平衡调节装置,平衡调节装置包括支撑杆,支撑杆上安装有配重块,配重块的两侧分别设有第一电磁铁和第二电磁铁,配重块的两端设有磁块,倾角传感器可控制第一电磁铁或第二电磁铁通电,第一电磁铁和第二电磁铁不可同时通电。本发明可检测机器人实际运行中的倾斜程度,并实时调节机器人的平衡,保证机器人运行的稳定性。
一种变电站电缆沟微型巡检机器人及其巡检电缆沟的变形方法.pdf
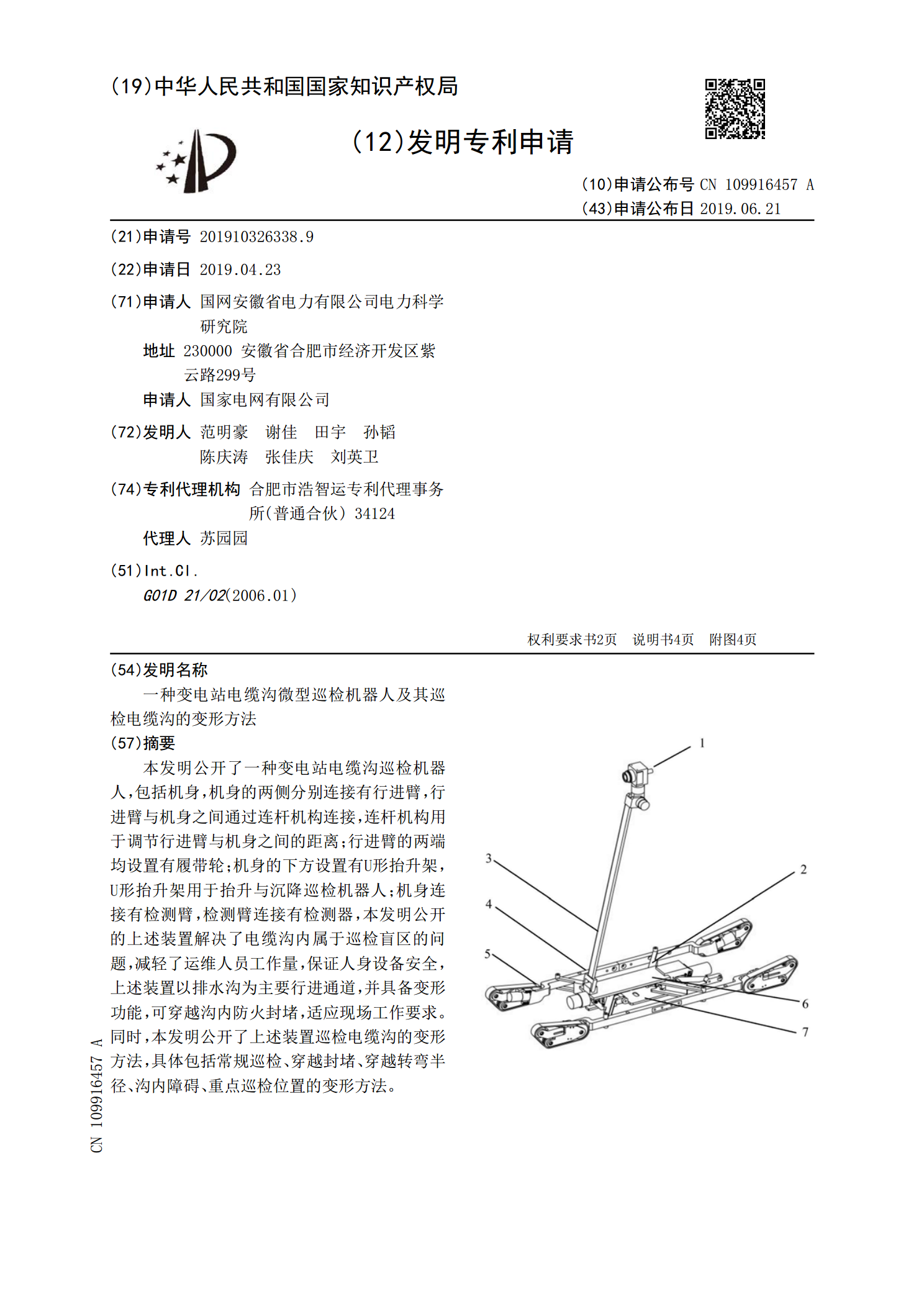
本发明公开了一种变电站电缆沟巡检机器人,包括机身,机身的两侧分别连接有行进臂,行进臂与机身之间通过连杆机构连接,连杆机构用于调节行进臂与机身之间的距离;行进臂的两端均设置有履带轮;机身的下方设置有U形抬升架,U形抬升架用于抬升与沉降巡检机器人;机身连接有检测臂,检测臂连接有检测器,本发明公开的上述装置解决了电缆沟内属于巡检盲区的问题,减轻了运维人员工作量,保证人身设备安全,上述装置以排水沟为主要行进通道,并具备变形功能,可穿越沟内防火封堵,适应现场工作要求。同时,本发明公开了上述装置巡检电缆沟的变形方法,
配网电缆沟索道式微型巡检机器人.pdf
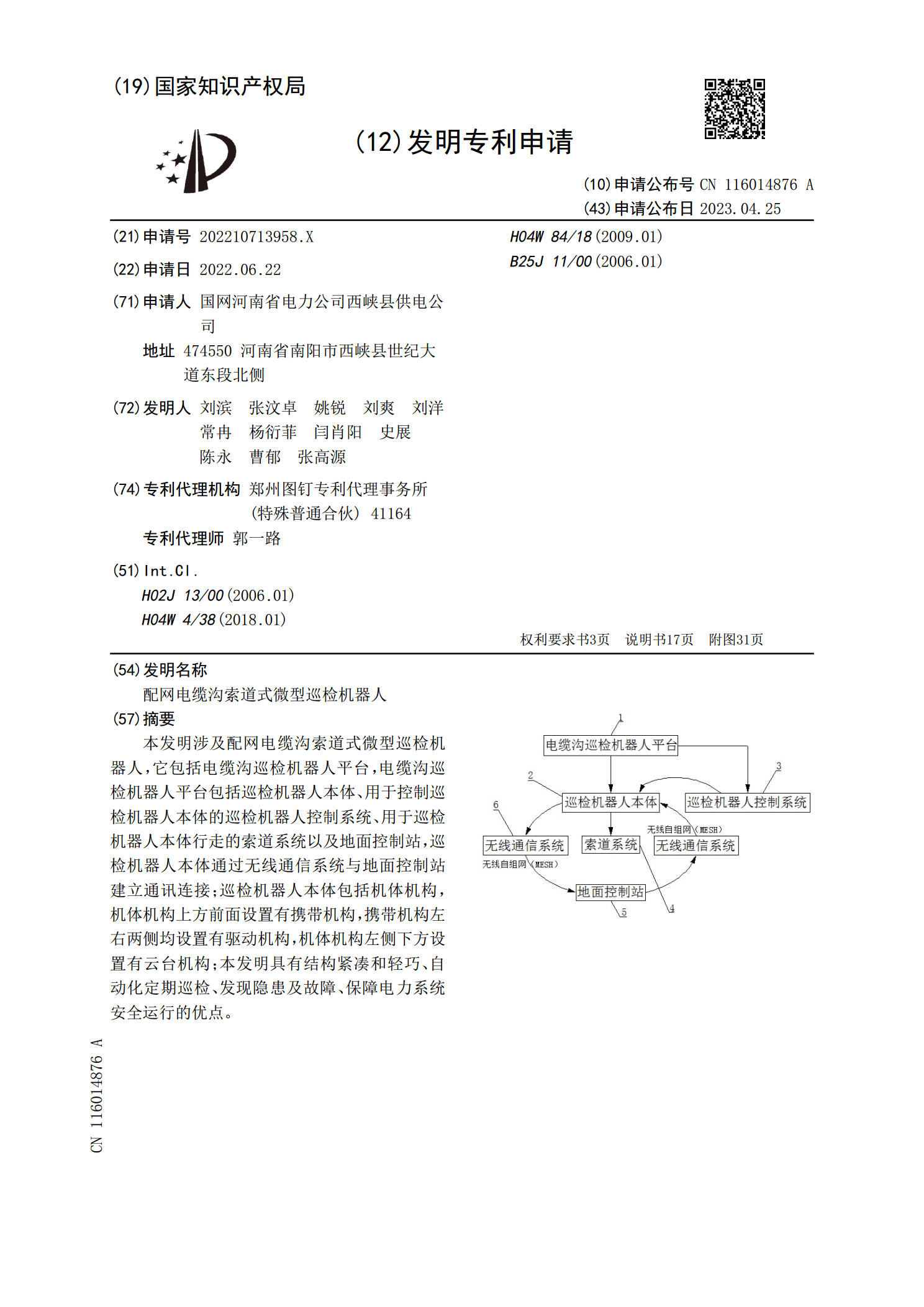
本发明涉及配网电缆沟索道式微型巡检机器人,它包括电缆沟巡检机器人平台,电缆沟巡检机器人平台包括巡检机器人本体、用于控制巡检机器人本体的巡检机器人控制系统、用于巡检机器人本体行走的索道系统以及地面控制站,巡检机器人本体通过无线通信系统与地面控制站建立通讯连接;巡检机器人本体包括机体机构,机体机构上方前面设置有携带机构,携带机构左右两侧均设置有驱动机构,机体机构左侧下方设置有云台机构;本发明具有结构紧凑和轻巧、自动化定期巡检、发现隐患及故障、保障电力系统安全运行的优点。

一种电缆隧道巡检机器人.pdf
本申请公开了一种电缆隧道巡检机器人,包括机器人主体、行走组件、监测组件和多个可伸缩的机械臂;机械臂的一端安装于机器人主体上,另一端与监测组件连接;行走组件包括行走支架和行走轮;行走轮安装于行走支架上;行走支架与机器人主体连接。通过在机器人轨道上移动和可伸缩机械臂带动监测组件,能够实现对电缆进行抵近、多角度观察。

一种电缆隧道巡检机器人.pdf
本发明公开了一种电缆隧道巡检机器人,包括支撑座和滑轨,所述支撑座的底部设有与滑轨对应的通道,所述支撑座的一侧固定连接有第一伺服电机,所述第一伺服电机的输出端贯穿支撑座的外壁并与通道的内壁转动连接,所述第一伺服电机的输出端固定套接有齿轮,所述滑轨的顶部等距设有与齿轮相啮合的多个轮齿,所述支撑座的底部固定连接有第二伺服电机,所述第二伺服电机的输出端通过转轴转动连接有对称设置的两个挂杆,所述挂杆远离转轴的一端和支撑座的底部通过花篮螺丝连接。本发明通过滑轨和悬空的设置,使装置不会受到隧道内地面环境的影响,从而扩展