
一种基于智能图像识别的电力巡检用机器人及其使用方法.pdf

努力****梓颖

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于智能图像识别的电力巡检用机器人及其使用方法.pdf
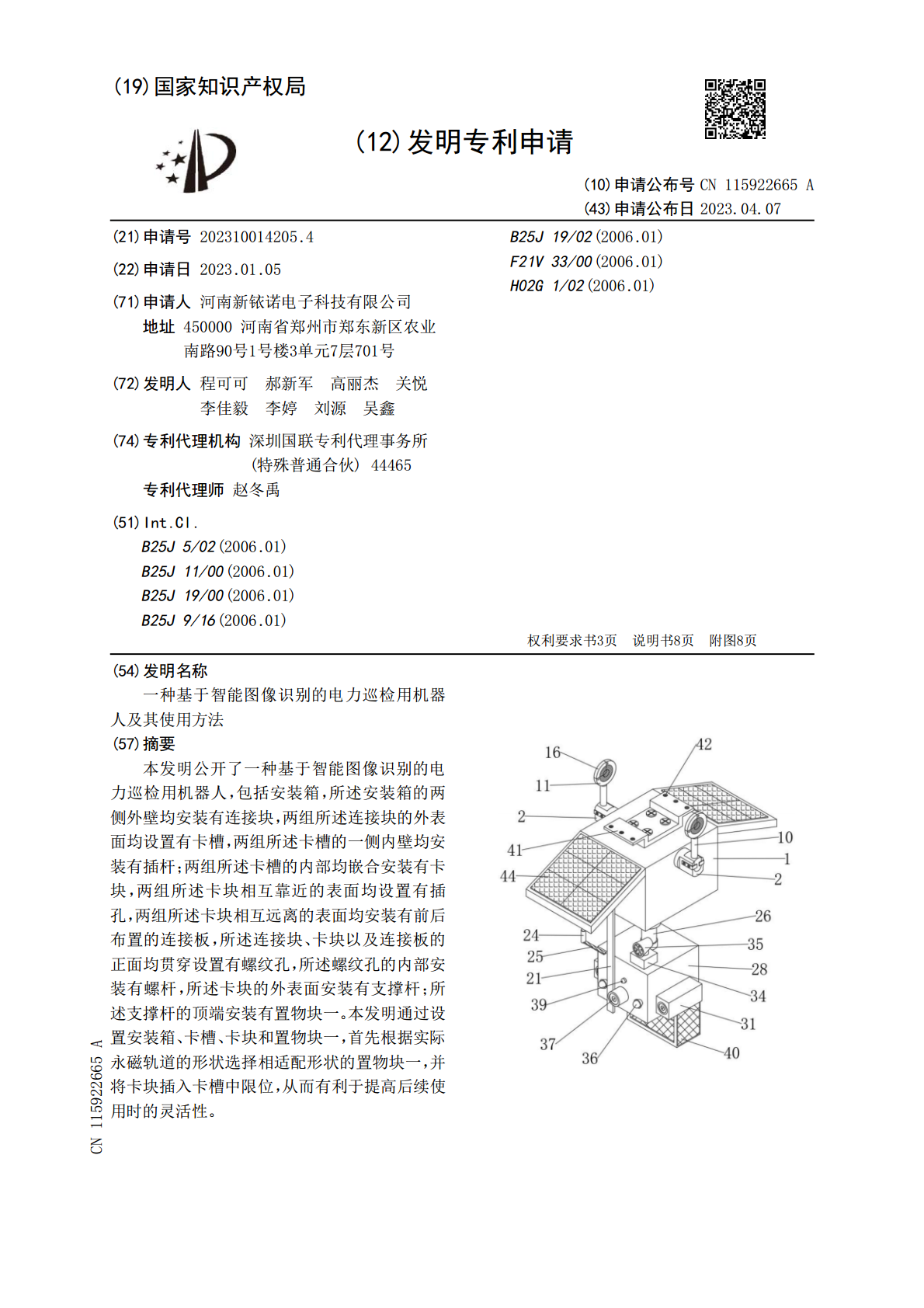
本发明公开了一种基于智能图像识别的电力巡检用机器人,包括安装箱,所述安装箱的两侧外壁均安装有连接块,两组所述连接块的外表面均设置有卡槽,两组所述卡槽的一侧内壁均安装有插杆;两组所述卡槽的内部均嵌合安装有卡块,两组所述卡块相互靠近的表面均设置有插孔,两组所述卡块相互远离的表面均安装有前后布置的连接板,所述连接块、卡块以及连接板的正面均贯穿设置有螺纹孔,所述螺纹孔的内部安装有螺杆,所述卡块的外表面安装有支撑杆;所述支撑杆的顶端安装有置物块一。本发明通过设置安装箱、卡槽、卡块和置物块一,首先根据实际永磁轨道的形

一种基于智能化的电力用巡检机器人.pdf
本发明属于电力巡检技术领域,且公开了一种基于智能化的电力用巡检机器人,包括机体,所述机体上设置有探头;其中,所述探头由可见光摄像机和红外热像仪组成;紧固件,布置于所述机体的前端;障碍清除机构,布置于所述机体的左侧;防护机构,布置于所述机体的顶部。本发明设置的升降板起到挡水和保护的效果,避免高空掉落的水进入探头内导致其线路短路和高空坠落物砸坏探头的问题,而设置的第一加长铁板和第二加长铁板可旋转,旋转展开后可增加升降板挡水和保护的范围,且设置的弹簧使得缓冲板具有一定的缓冲效果,通过缓冲板可进一步地提高防护效果
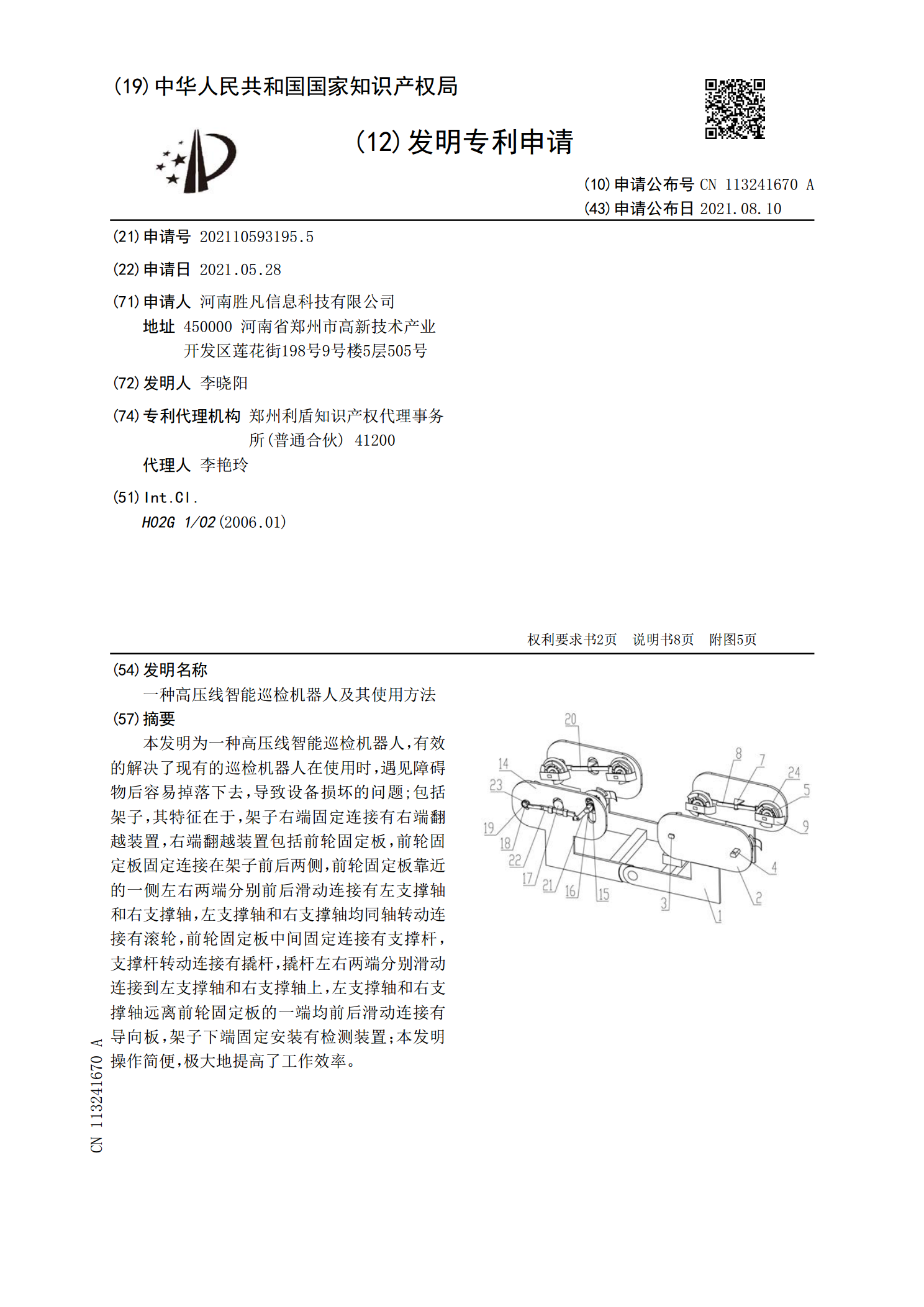
一种高压线智能巡检机器人及其使用方法.pdf
本发明为一种高压线智能巡检机器人,有效的解决了现有的巡检机器人在使用时,遇见障碍物后容易掉落下去,导致设备损坏的问题;包括架子,其特征在于,架子右端固定连接有右端翻越装置,右端翻越装置包括前轮固定板,前轮固定板固定连接在架子前后两侧,前轮固定板靠近的一侧左右两端分别前后滑动连接有左支撑轴和右支撑轴,左支撑轴和右支撑轴均同轴转动连接有滚轮,前轮固定板中间固定连接有支撑杆,支撑杆转动连接有撬杆,撬杆左右两端分别滑动连接到左支撑轴和右支撑轴上,左支撑轴和右支撑轴远离前轮固定板的一端均前后滑动连接有导向板,架子下
一种电力巡检用机器人.pdf
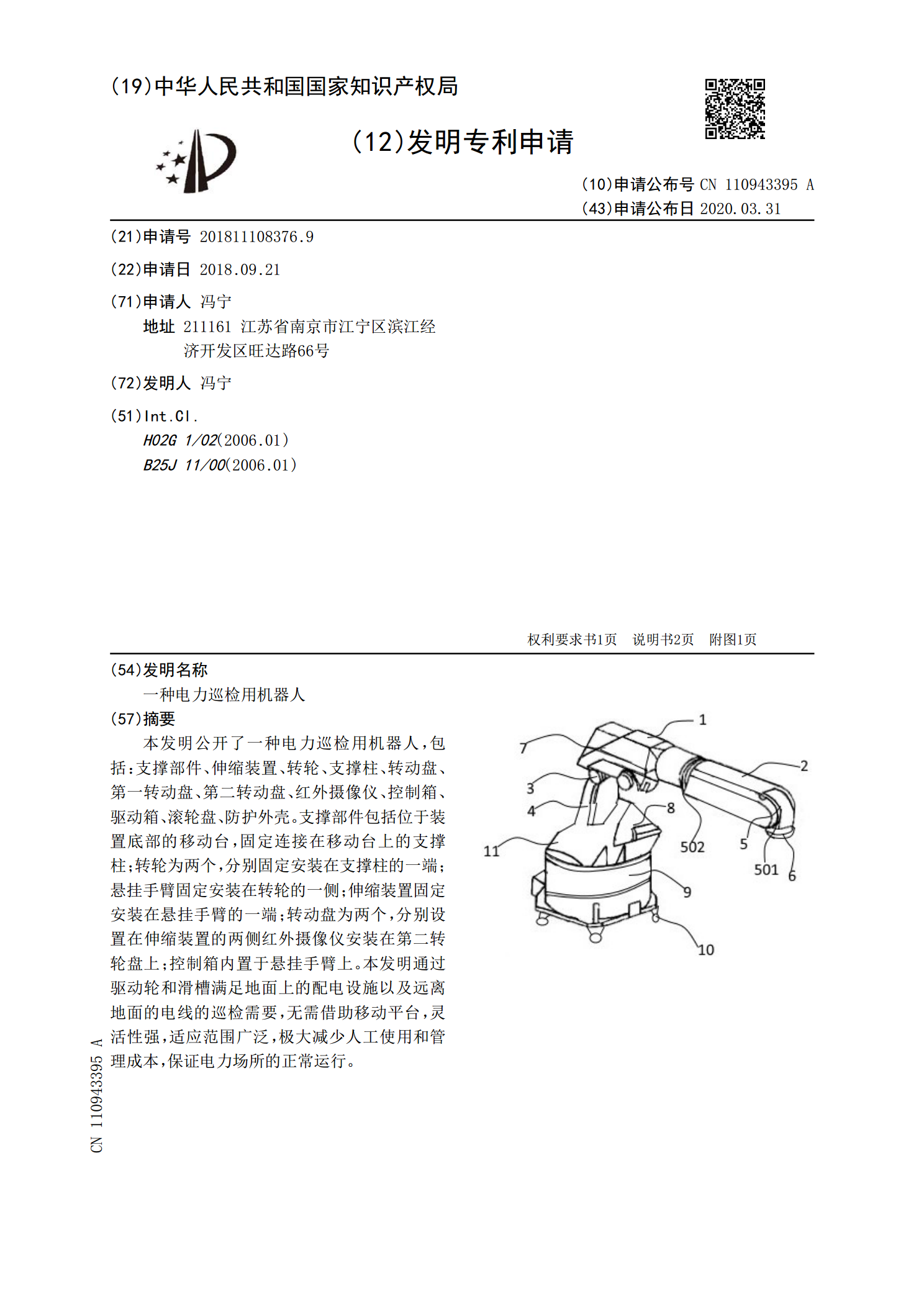
本发明公开了一种电力巡检用机器人,包括:支撑部件、伸缩装置、转轮、支撑柱、转动盘、第一转动盘、第二转动盘、红外摄像仪、控制箱、驱动箱、滚轮盘、防护外壳。支撑部件包括位于装置底部的移动台,固定连接在移动台上的支撑柱;转轮为两个,分别固定安装在支撑柱的一端;悬挂手臂固定安装在转轮的一侧;伸缩装置固定安装在悬挂手臂的一端;转动盘为两个,分别设置在伸缩装置的两侧红外摄像仪安装在第二转轮盘上;控制箱内置于悬挂手臂上。本发明通过驱动轮和滑槽满足地面上的配电设施以及远离地面的电线的巡检需要,无需借助移动平台,灵活性强,
一种智能电力网络巡检机器人.pdf
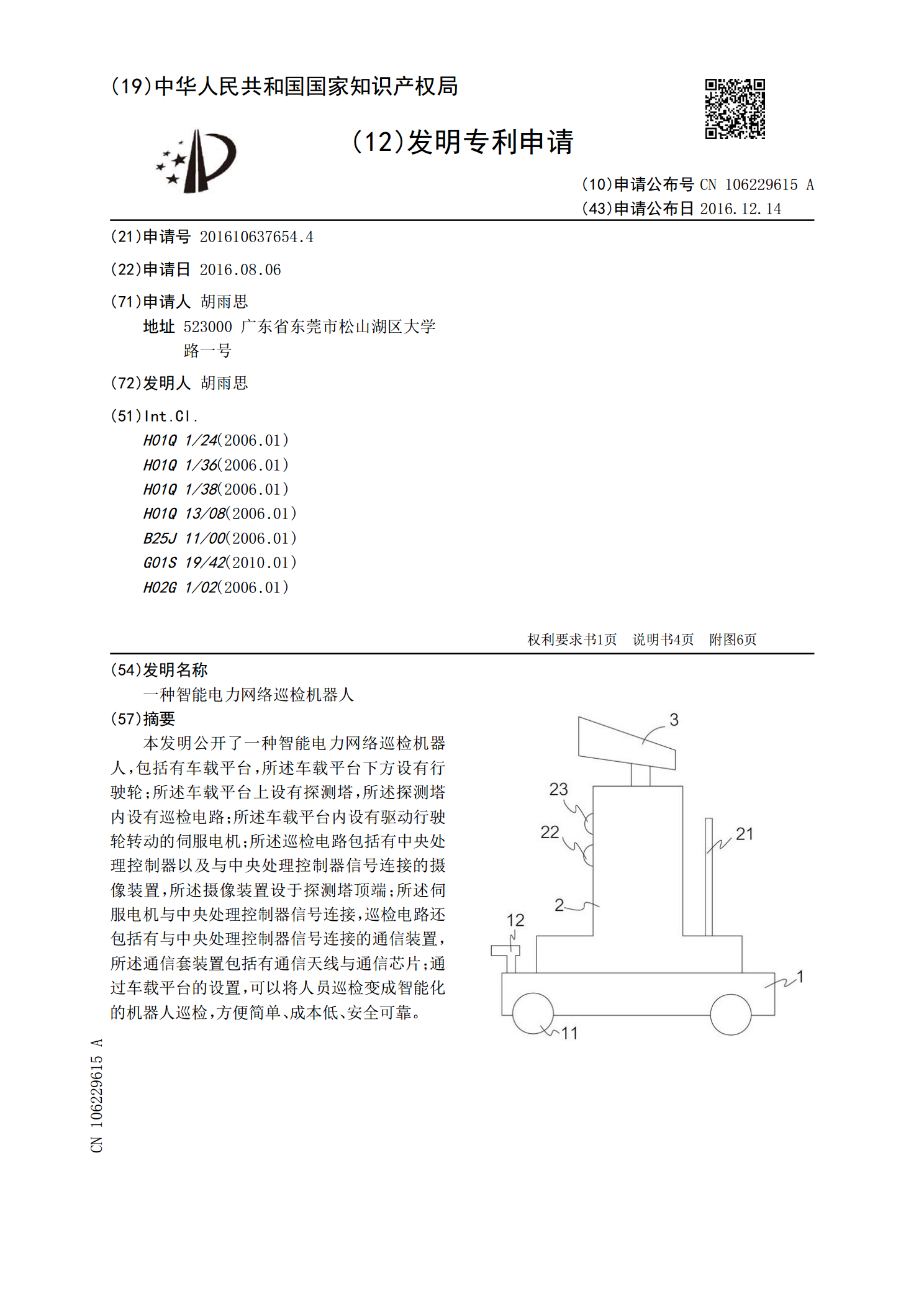
本发明公开了一种智能电力网络巡检机器人,包括有车载平台,所述车载平台下方设有行驶轮;所述车载平台上设有探测塔,所述探测塔内设有巡检电路;所述车载平台内设有驱动行驶轮转动的伺服电机;所述巡检电路包括有中央处理控制器以及与中央处理控制器信号连接的摄像装置,所述摄像装置设于探测塔顶端;所述伺服电机与中央处理控制器信号连接,巡检电路还包括有与中央处理控制器信号连接的通信装置,所述通信套装置包括有通信天线与通信芯片;通过车载平台的设置,可以将人员巡检变成智能化的机器人巡检,方便简单、成本低、安全可靠。