
一种具有防倾倒功能的智能椅子.pdf

文库****坚白

1/10

2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种具有防倾倒功能的智能椅子.pdf
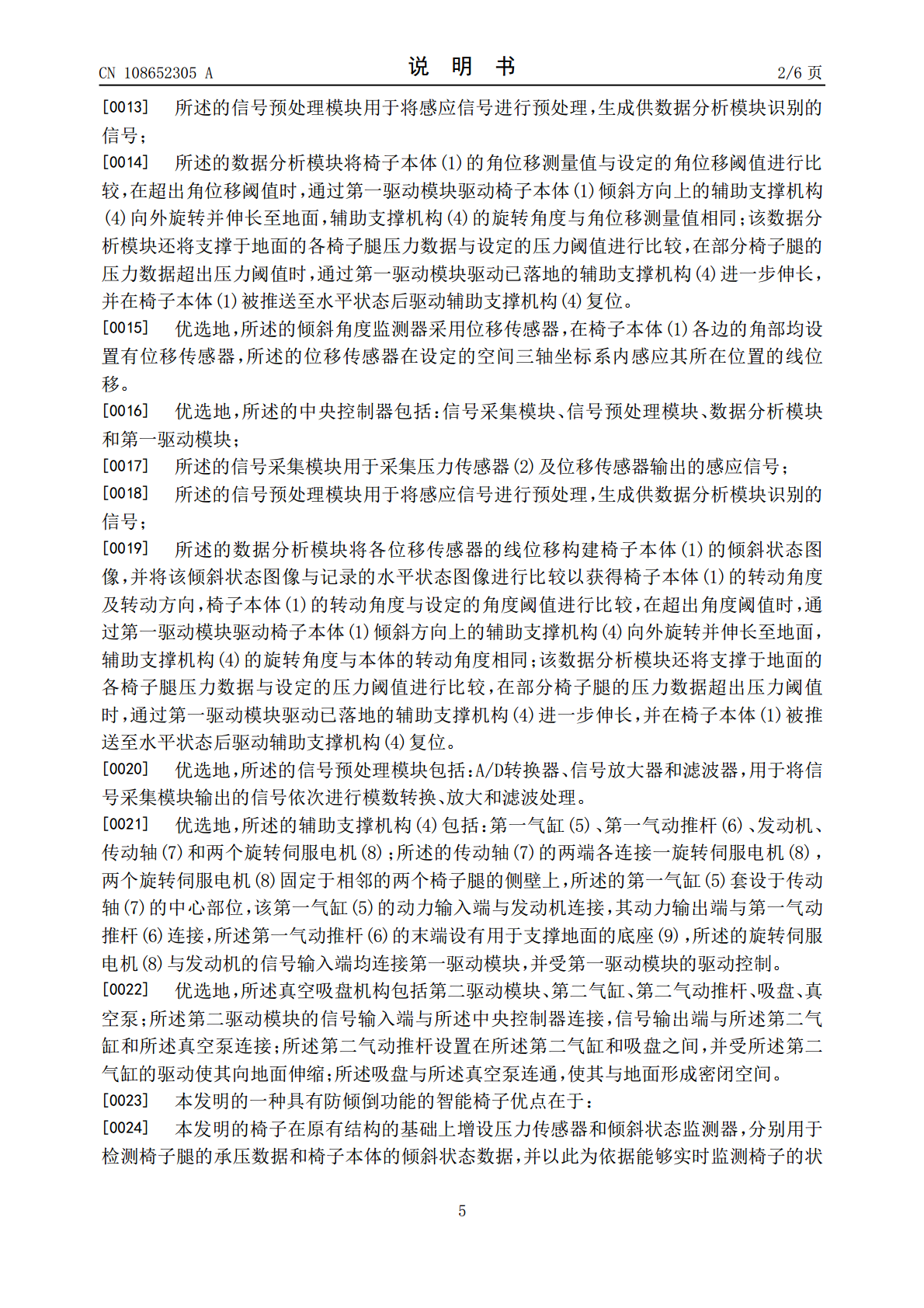
本发明提供了一种具有防倾倒功能的智能椅子,包括:椅子本体(1)、压力传感器(2)、倾斜状态监测器(3)、中央控制器、辅助支撑机构(4)以及真空吸盘机构;压力传感器(2)用于感应椅子腿的压力数据,倾斜状态监测器(3)用于感应椅子本体(1)的倾斜状态并生成倾斜数据,在任意两个相邻的椅子腿之间均设置有辅助支撑机构(4),用于为椅子提供辅助支撑力,中央控制器用于对各椅子腿的压力数据和倾斜数据进行分析,调整各辅助支撑机构(4)的伸长量及指向角度及控制真空吸盘机构吸附在地面。本发明能够实时监测椅子的状态,并通过辅助支
一种具有防倾倒功能的椅子.pdf
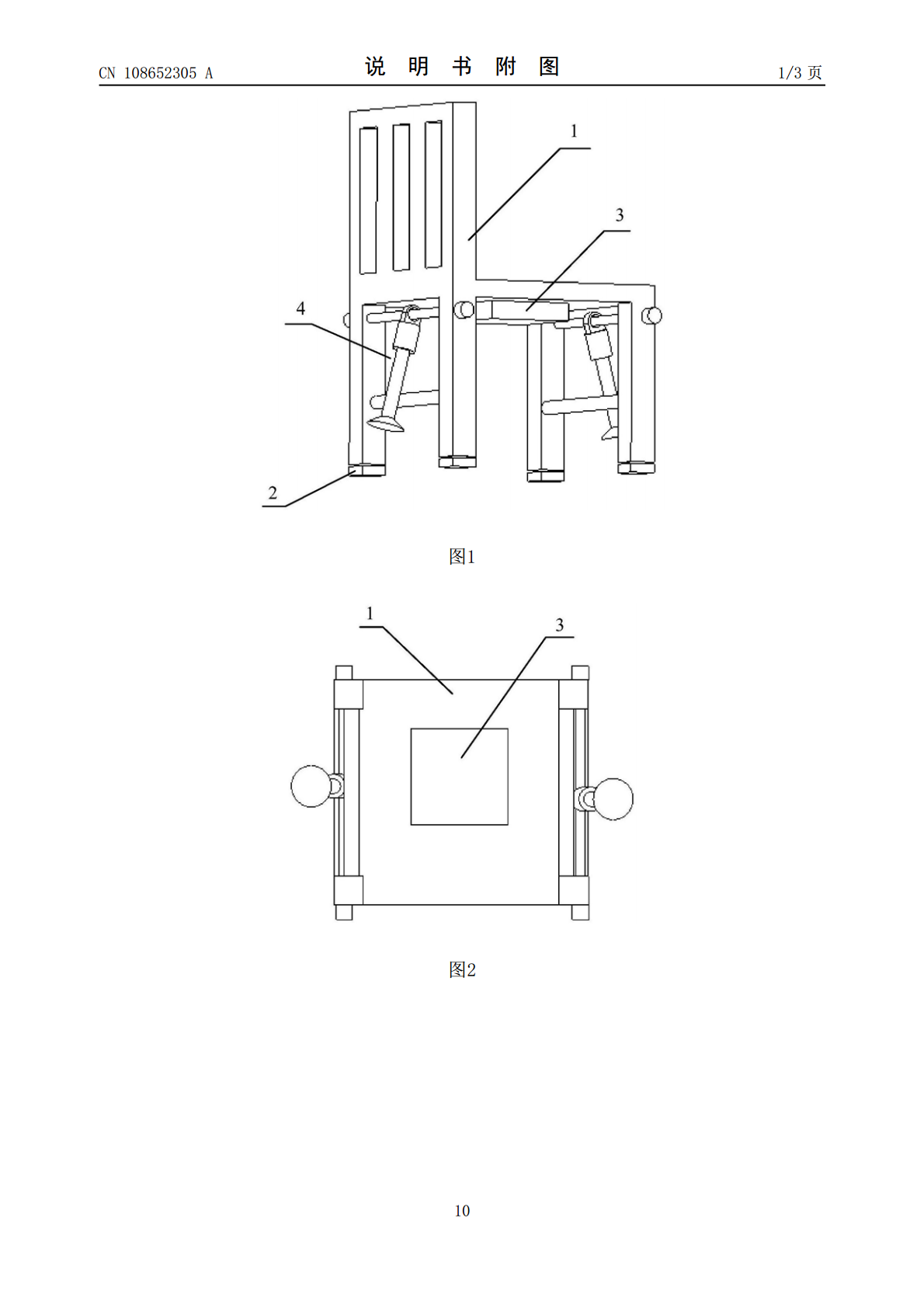
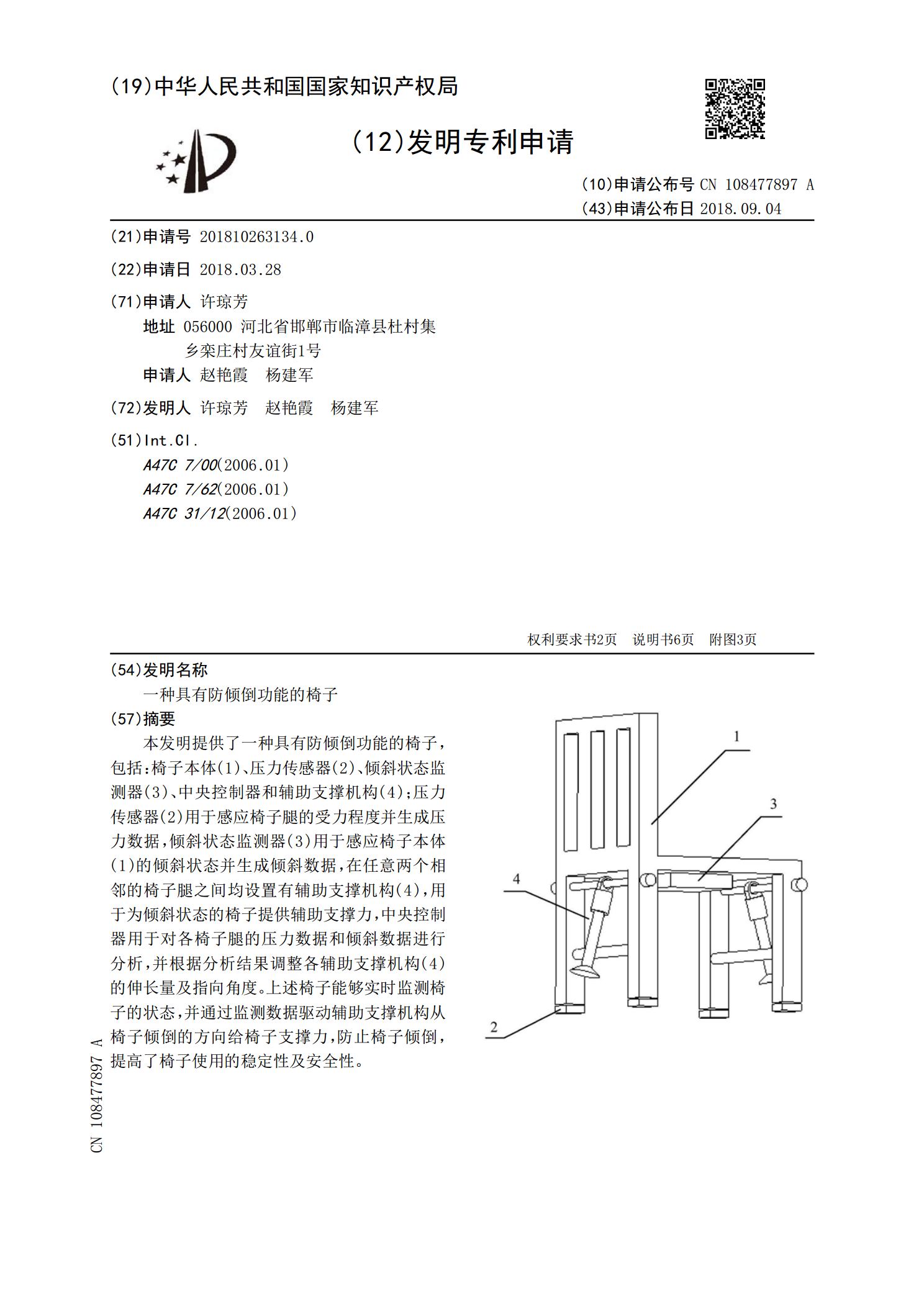
本发明提供了一种具有防倾倒功能的椅子,包括:椅子本体(1)、压力传感器(2)、倾斜状态监测器(3)、中央控制器和辅助支撑机构(4);压力传感器(2)用于感应椅子腿的受力程度并生成压力数据,倾斜状态监测器(3)用于感应椅子本体(1)的倾斜状态并生成倾斜数据,在任意两个相邻的椅子腿之间均设置有辅助支撑机构(4),用于为倾斜状态的椅子提供辅助支撑力,中央控制器用于对各椅子腿的压力数据和倾斜数据进行分析,并根据分析结果调整各辅助支撑机构(4)的伸长量及指向角度。上述椅子能够实时监测椅子的状态,并通过监测数据驱动辅
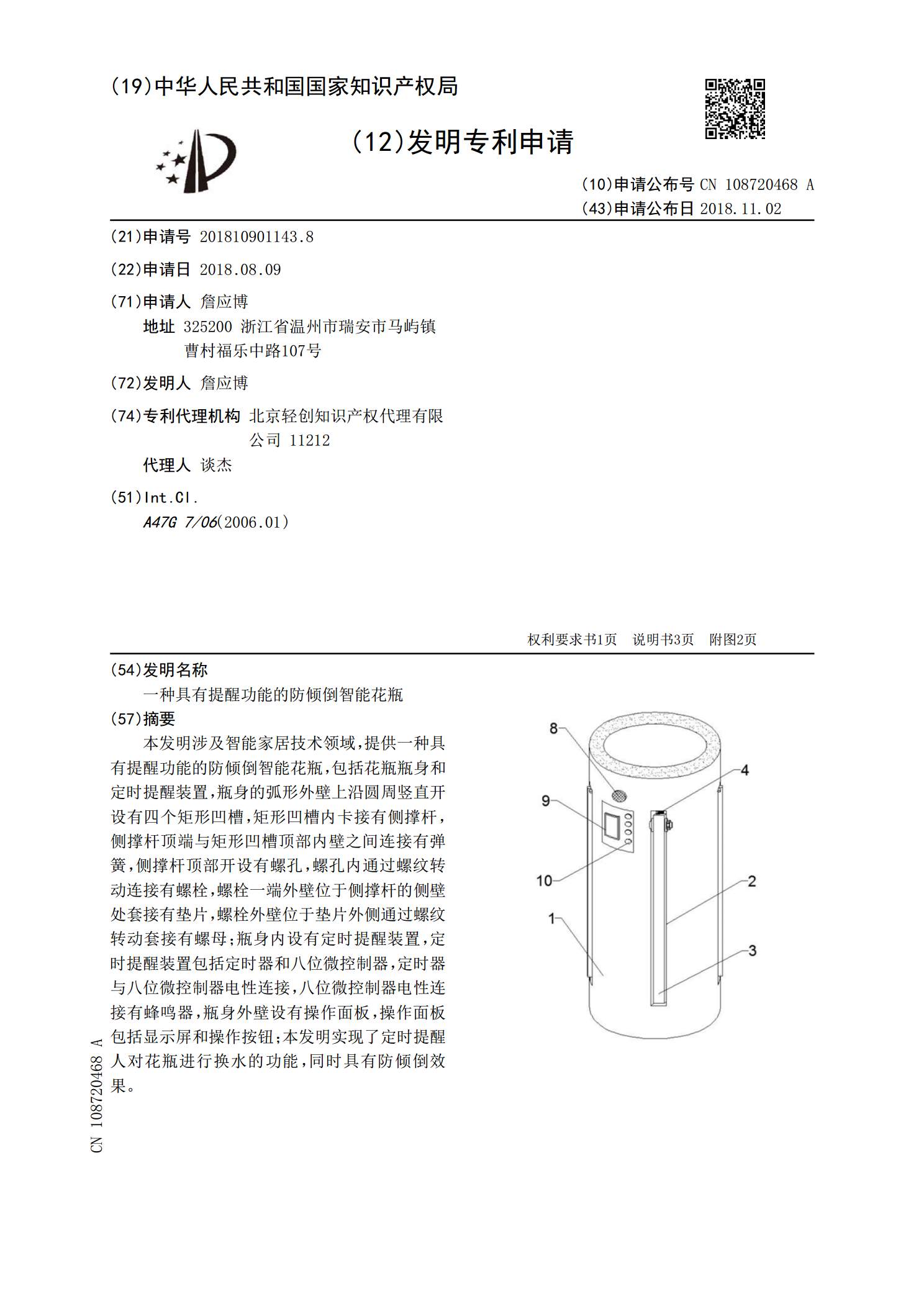
一种具有提醒功能的防倾倒智能花瓶.pdf
本发明涉及智能家居技术领域,提供一种具有提醒功能的防倾倒智能花瓶,包括花瓶瓶身和定时提醒装置,瓶身的弧形外壁上沿圆周竖直开设有四个矩形凹槽,矩形凹槽内卡接有侧撑杆,侧撑杆顶端与矩形凹槽顶部内壁之间连接有弹簧,侧撑杆顶部开设有螺孔,螺孔内通过螺纹转动连接有螺栓,螺栓一端外壁位于侧撑杆的侧壁处套接有垫片,螺栓外壁位于垫片外侧通过螺纹转动套接有螺母;瓶身内设有定时提醒装置,定时提醒装置包括定时器和八位微控制器,定时器与八位微控制器电性连接,八位微控制器电性连接有蜂鸣器,瓶身外壁设有操作面板,操作面板包括显示屏和

一种具有防倾倒功能的轮椅.pdf
本发明公开了一种具有防倾倒功能的轮椅,包括:轮椅本体,轮椅本体内设有控制器;重力锤,重力锤竖直布置且其一端与轮椅本体底部枢转连接;两个接触开关,两个接触开关分别布置于靠近重力锤另一端的两侧并与轮椅本体底部固定连接;两组防倾倒轮,控制器通过驱动电机控制防倾倒轮运转,重力锤触碰任一接触开关,控制器驱动对应的防倾倒轮定向转动或自动伸出。该轮椅通过在轮椅前后都安装有防倾倒轮,在上坡、下坡或坑洼路面行驶时,通过轮椅本体底部的重力锤碰触两个接触开关,能够使防倾倒轮的长度或角度按预先设置好的长度和角度自动调节,减小防倾
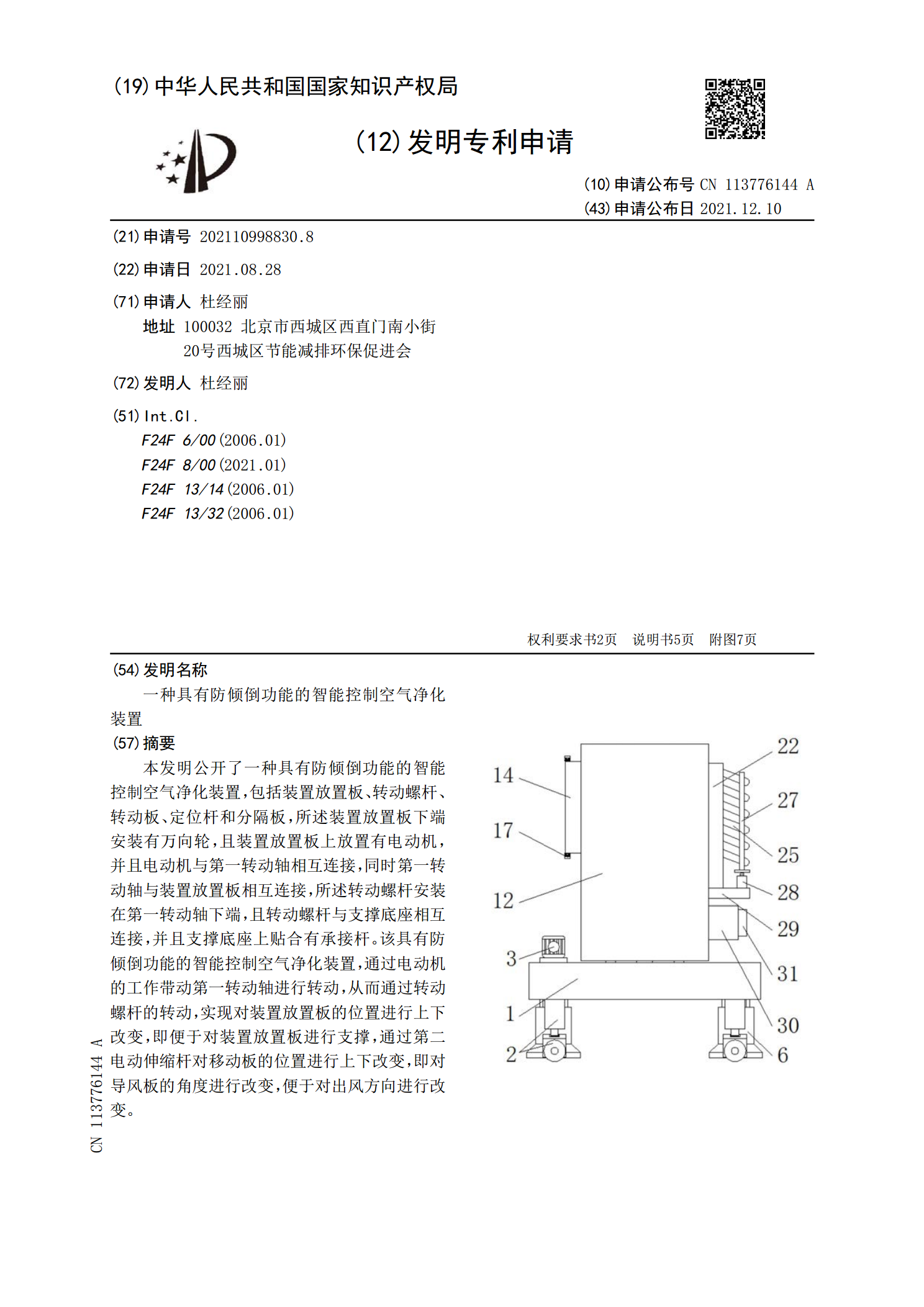
一种具有防倾倒功能的智能控制空气净化装置.pdf
本发明公开了一种具有防倾倒功能的智能控制空气净化装置,包括装置放置板、转动螺杆、转动板、定位杆和分隔板,所述装置放置板下端安装有万向轮,且装置放置板上放置有电动机,并且电动机与第一转动轴相互连接,同时第一转动轴与装置放置板相互连接,所述转动螺杆安装在第一转动轴下端,且转动螺杆与支撑底座相互连接,并且支撑底座上贴合有承接杆。该具有防倾倒功能的智能控制空气净化装置,通过电动机的工作带动第一转动轴进行转动,从而通过转动螺杆的转动,实现对装置放置板的位置进行上下改变,即便于对装置放置板进行支撑,通过第二电动伸缩杆