
摆杆锁止式自锁继电器机械臂.pdf

桂香****盟主

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
摆杆锁止式自锁继电器机械臂.pdf
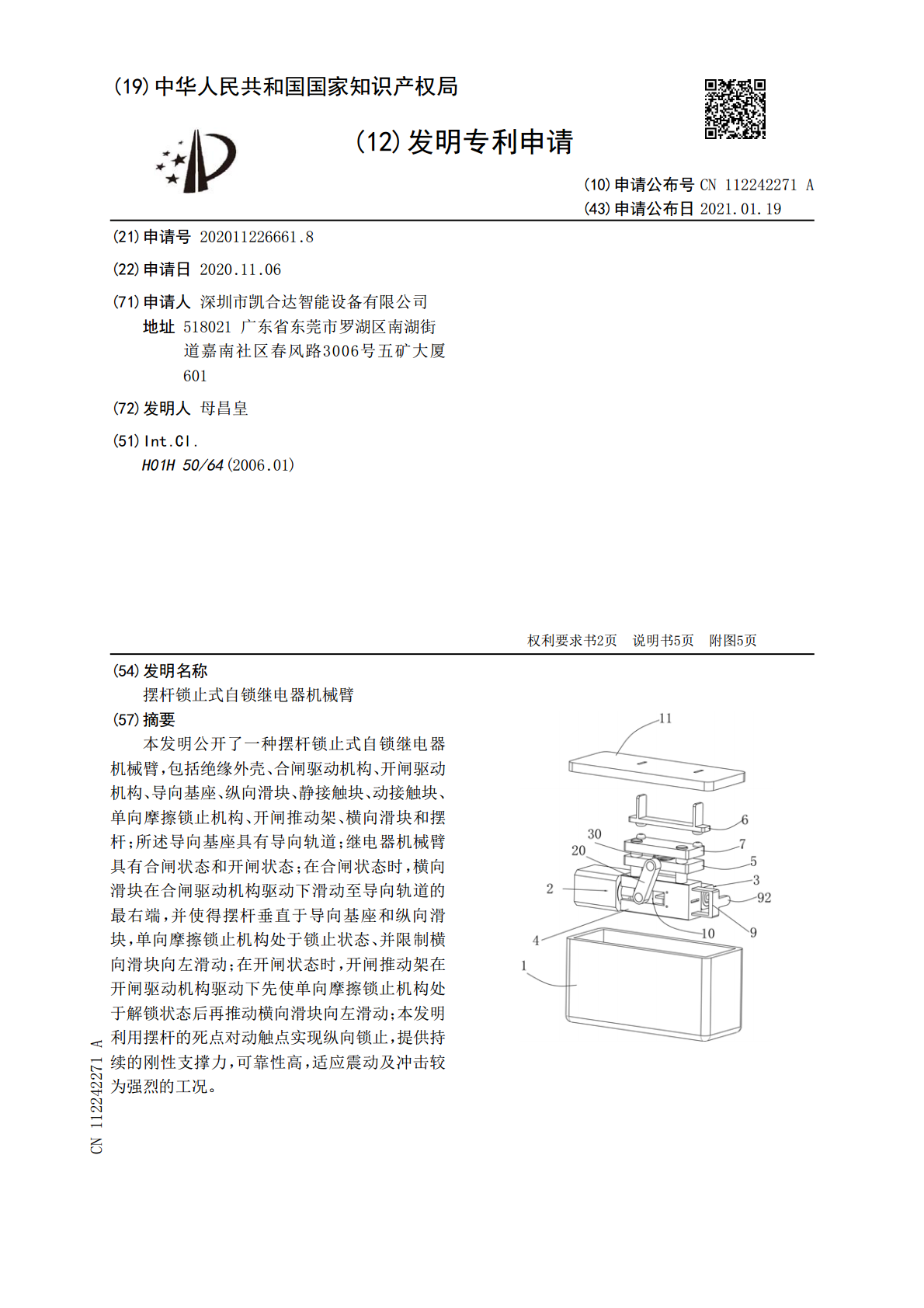
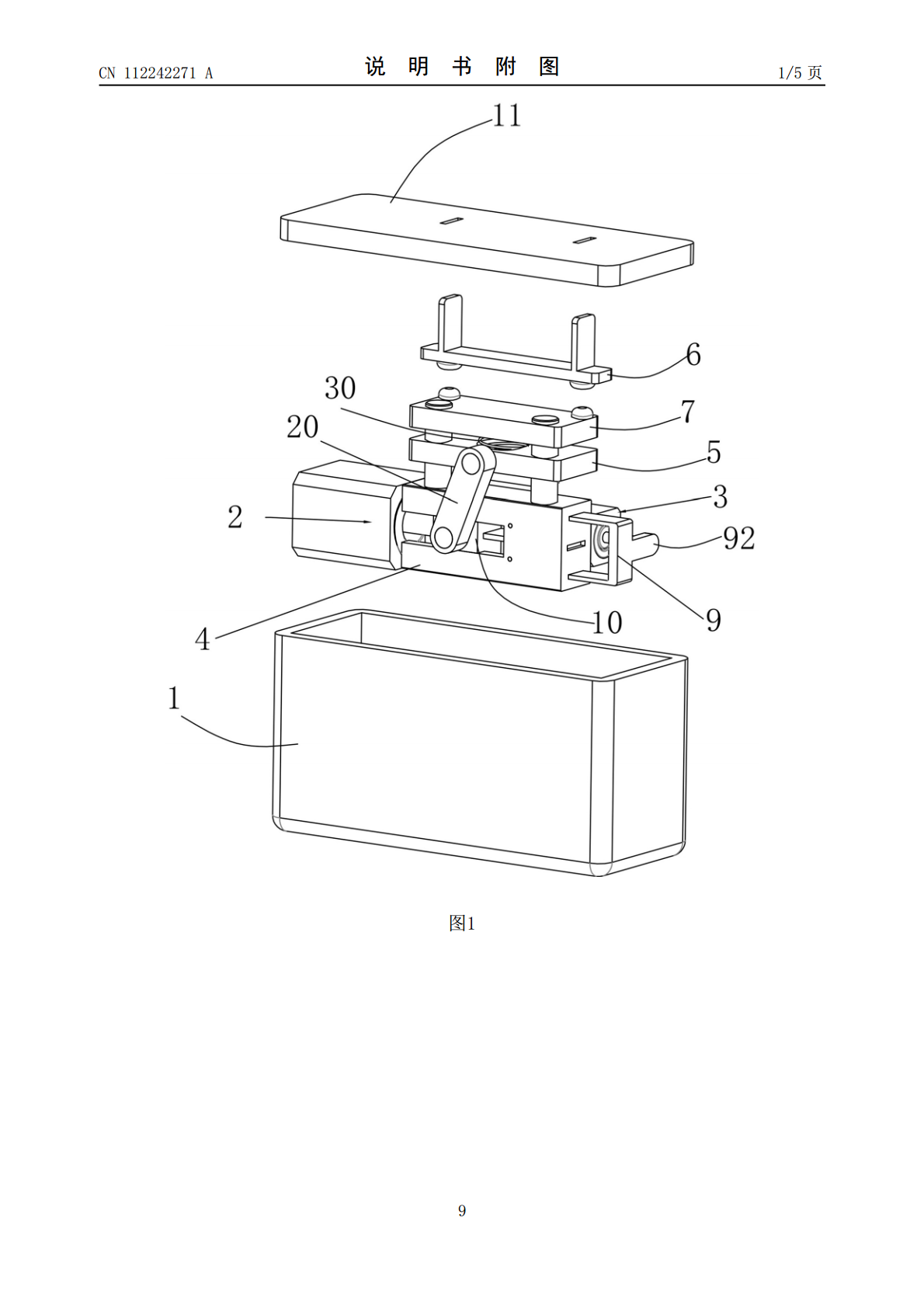
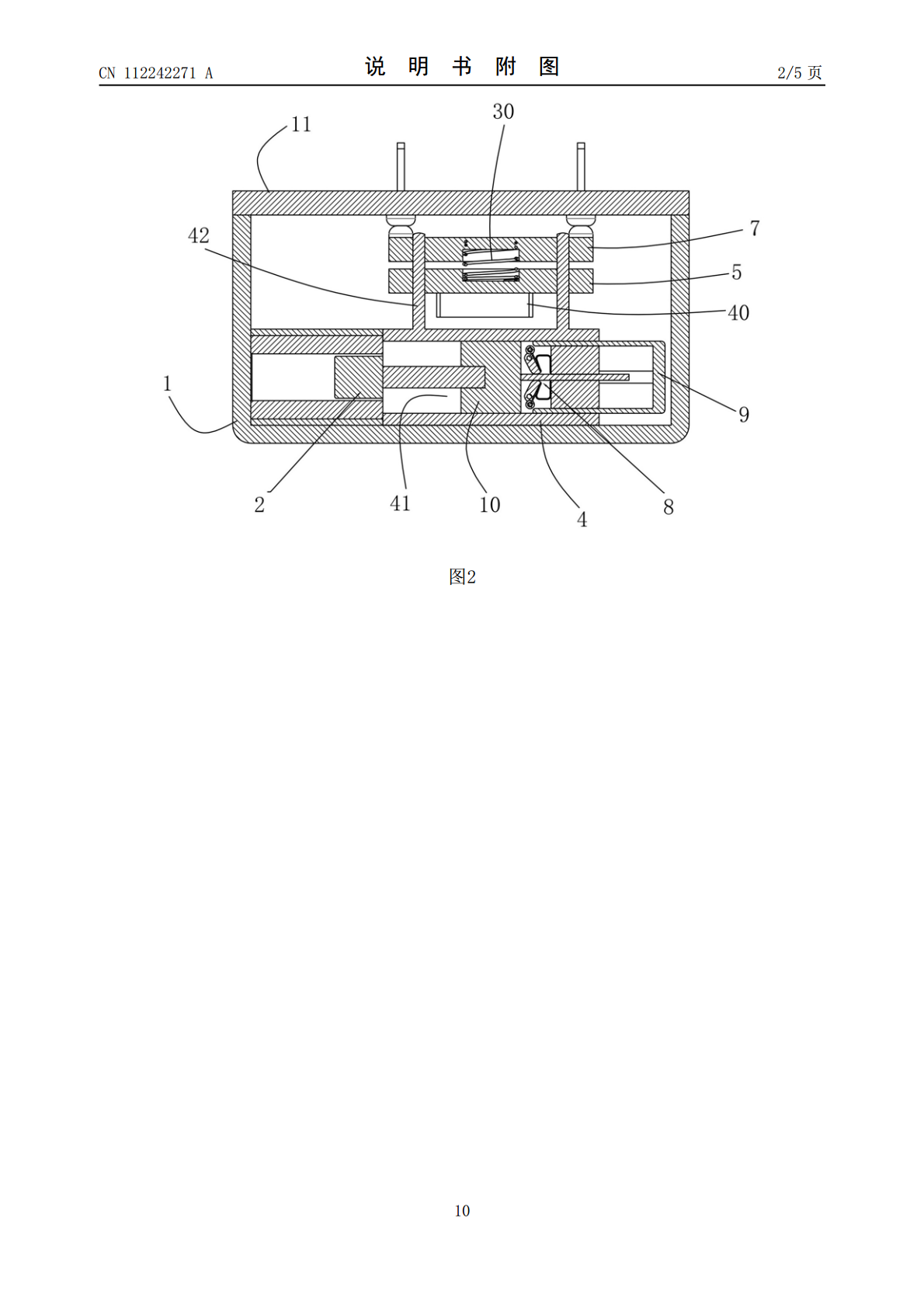
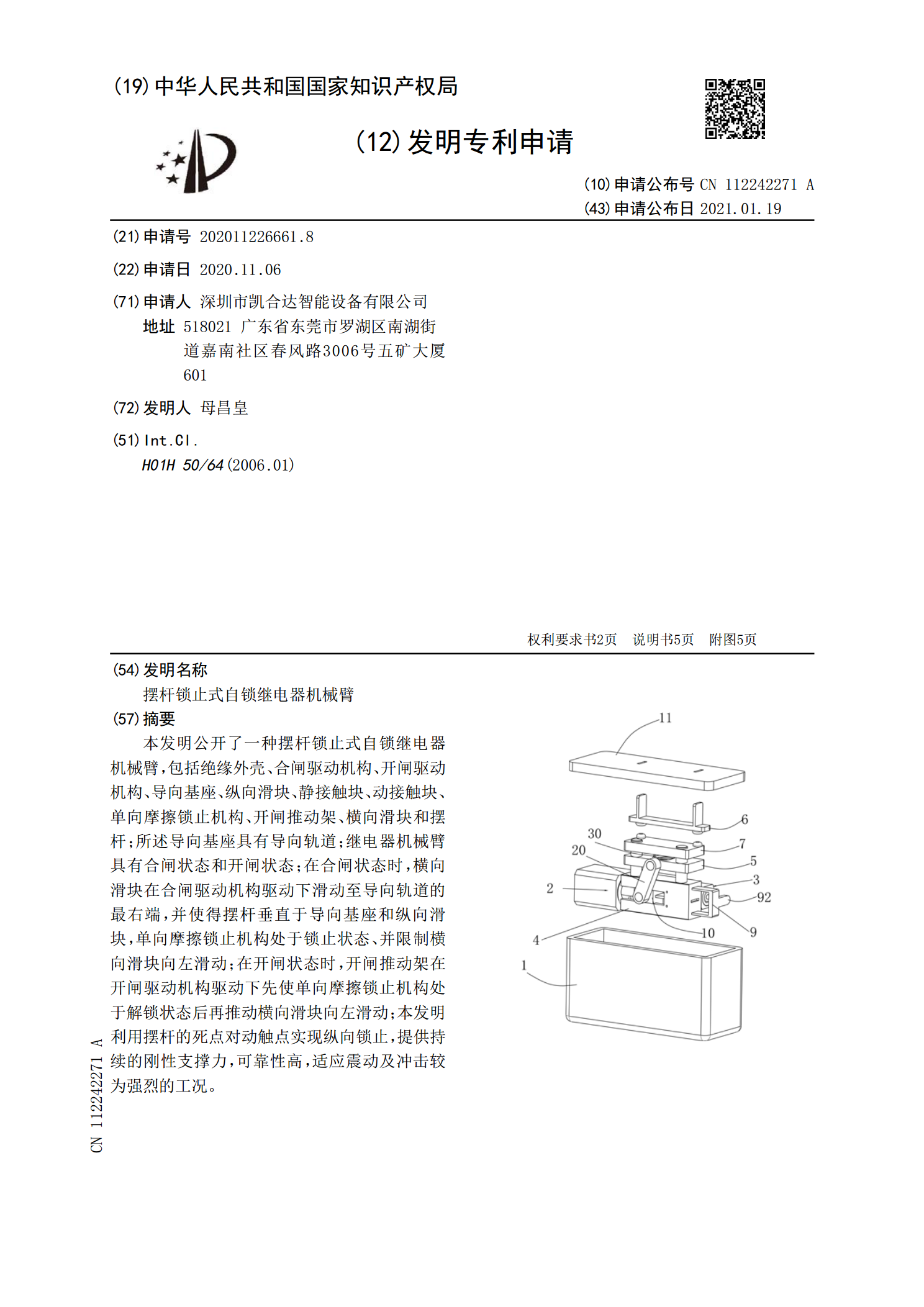
本发明公开了一种摆杆锁止式自锁继电器机械臂,包括绝缘外壳、合闸驱动机构、开闸驱动机构、导向基座、纵向滑块、静接触块、动接触块、单向摩擦锁止机构、开闸推动架、横向滑块和摆杆;所述导向基座具有导向轨道;继电器机械臂具有合闸状态和开闸状态;在合闸状态时,横向滑块在合闸驱动机构驱动下滑动至导向轨道的最右端,并使得摆杆垂直于导向基座和纵向滑块,单向摩擦锁止机构处于锁止状态、并限制横向滑块向左滑动;在开闸状态时,开闸推动架在开闸驱动机构驱动下先使单向摩擦锁止机构处于解锁状态后再推动横向滑块向左滑动;本发明利用摆杆的死

一种自锁型导轨式机械臂.pdf
本实用新型公开了一种自锁型导轨式机械臂,包括导轨座和固定板,所述导轨座的顶部固定连接有安装座,且安装座之间通过丝杠连接,同时丝杠上连接有底座,所述丝杠的一端与电机的输出端连接,且电机安装在一侧的安装座内,所述底座内部安装有马达。该自锁型导轨式机械臂,本实用新型通过液压缸、限位板和限位吸盘的配合可有效避免上述提到的机械臂的行走机构在机械臂进行夹持取放加工件时容易意外移动,进而容易出现夹持不稳定以及物品掉落的现象,因此具有一定的安全隐患的问题,两侧的液压缸可推动限位吸盘下移与地面接触吸附,从而即可在其进行夹持
一种直杆摆臂式防盗智能广告车位地锁.pdf
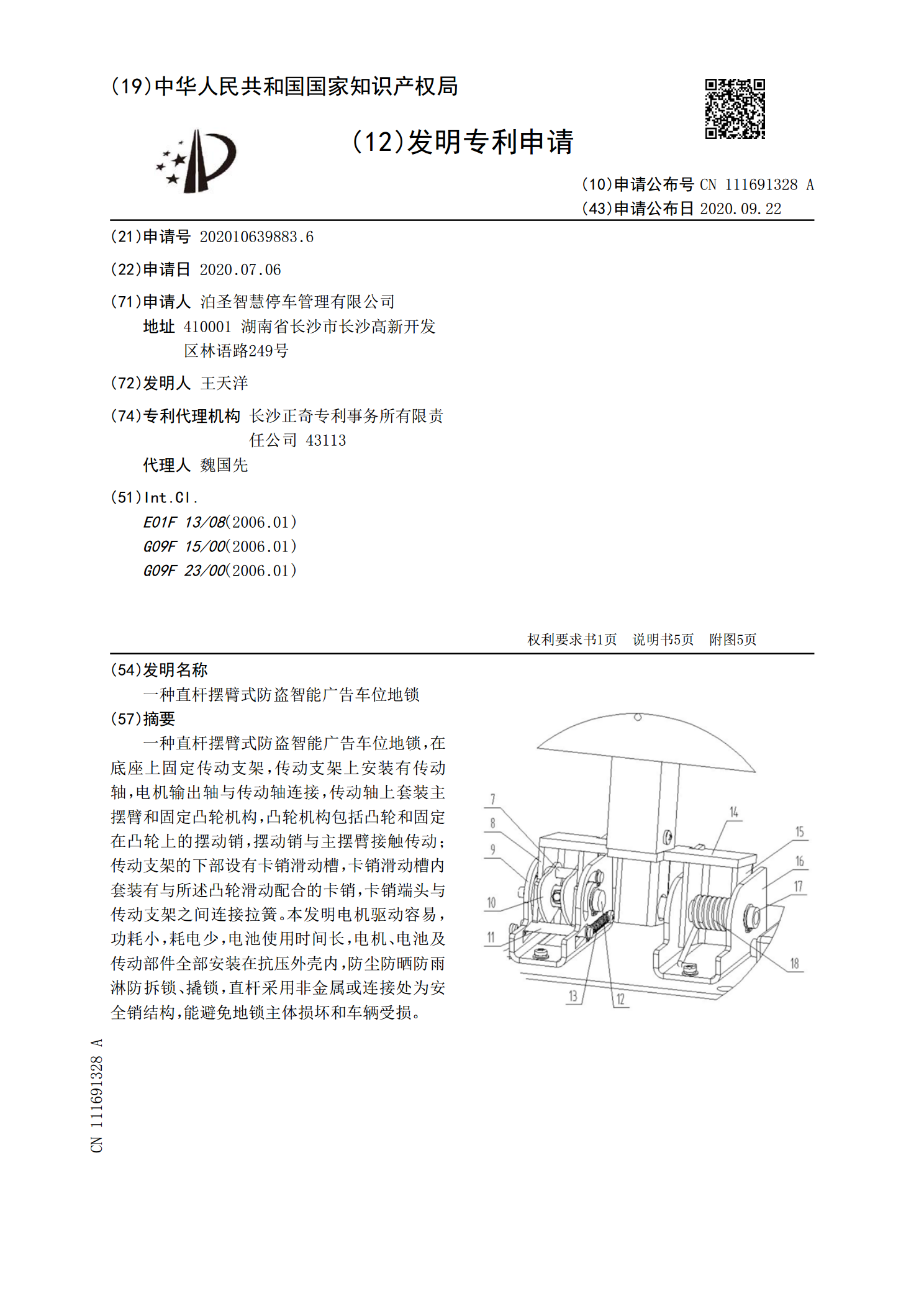
一种直杆摆臂式防盗智能广告车位地锁,在底座上固定传动支架,传动支架上安装有传动轴,电机输出轴与传动轴连接,传动轴上套装主摆臂和固定凸轮机构,凸轮机构包括凸轮和固定在凸轮上的摆动销,摆动销与主摆臂接触传动;传动支架的下部设有卡销滑动槽,卡销滑动槽内套装有与所述凸轮滑动配合的卡销,卡销端头与传动支架之间连接拉簧。本发明电机驱动容易,功耗小,耗电少,电池使用时间长,电机、电池及传动部件全部安装在抗压外壳内,防尘防晒防雨淋防拆锁、撬锁,直杆采用非金属或连接处为安全销结构,能避免地锁主体损坏和车辆受损。

自锁止式户内高压接地开关.pdf
本发明公开了自锁止式户内高压接地开关,包括底座、静触头、动触头、绝缘子、转轴和半工字形滑轨支架,转轴连接在底座上,半工字形滑轨支架固定地套在转轴上;底座的底部设有凸台部,凸台部朝向绝缘子方向上设有下齿轮滑轨,动触头底部通过上齿轮滑块连接半工字形滑轨支架内上下运动,同时半工字形滑轨支架内对应上齿轮滑块的位置处设有齿轮滑条结构;上齿轮滑块前端通过拉杆和下滑块连接在下齿轮滑轨内前后运动;下滑块通过双向电机带动其在下齿轮滑轨内往复运动。本发明的户内高压接地开关,动触头采用上、下双齿轮滑轨通过到对其进行往复移动控制

一种用于机械臂的齿轮齿条式锁止装置.pdf
本发明涉及一种用于机械臂的齿轮齿条式锁止装置,包括多个节臂,其中相邻两个节臂之间设有一齿轮齿条式锁止装置。本发明设计出一种齿轮齿条式锁止装置,在不使用机械臂时其可以确保多个节臂之间不会发生相对转动或活动,避免因节臂转动或摆动造成人员或物品的损害。