
一种高精度下肢步态康复机器人.pdf

一只****呀9

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种高精度下肢步态康复机器人.pdf
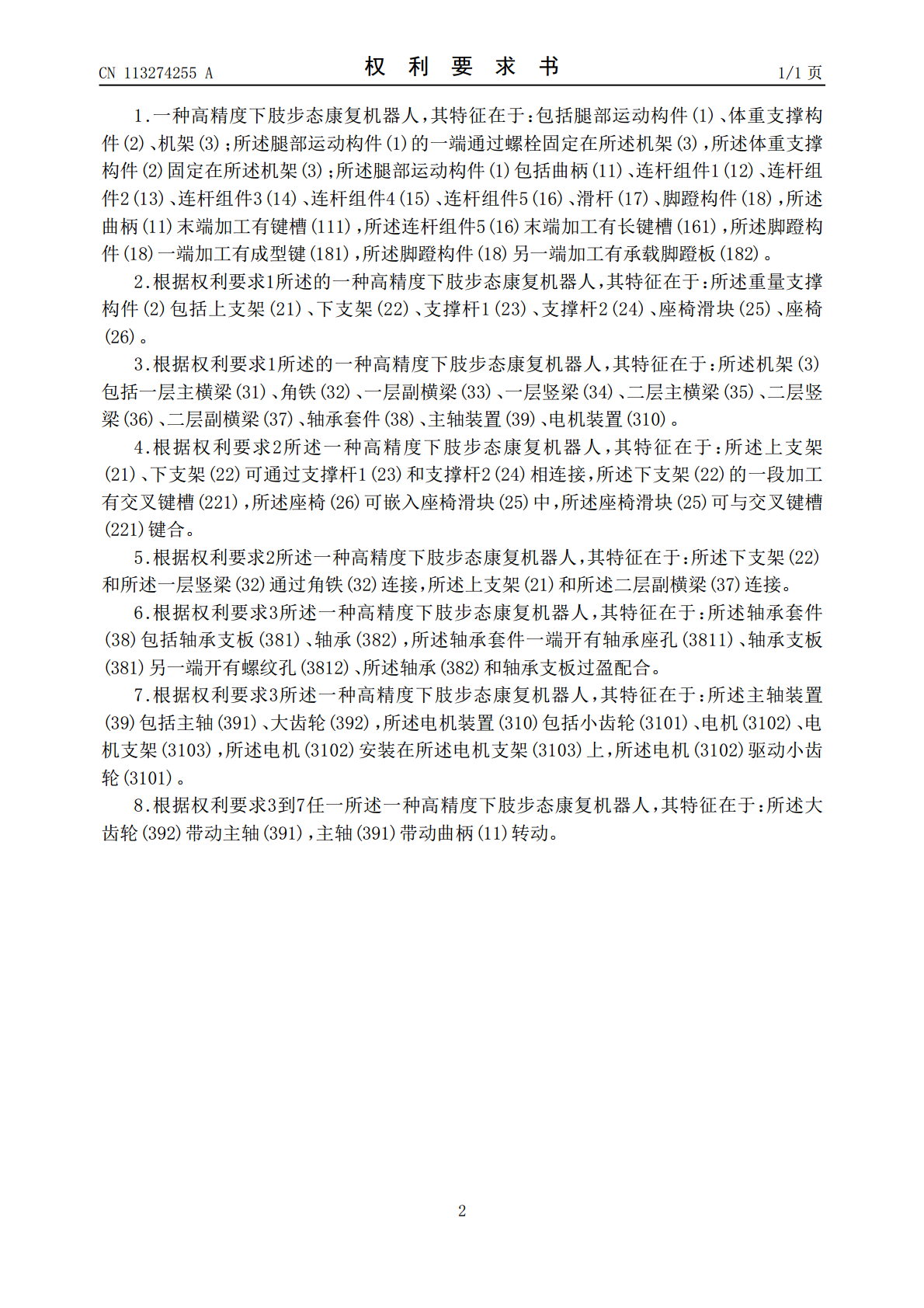
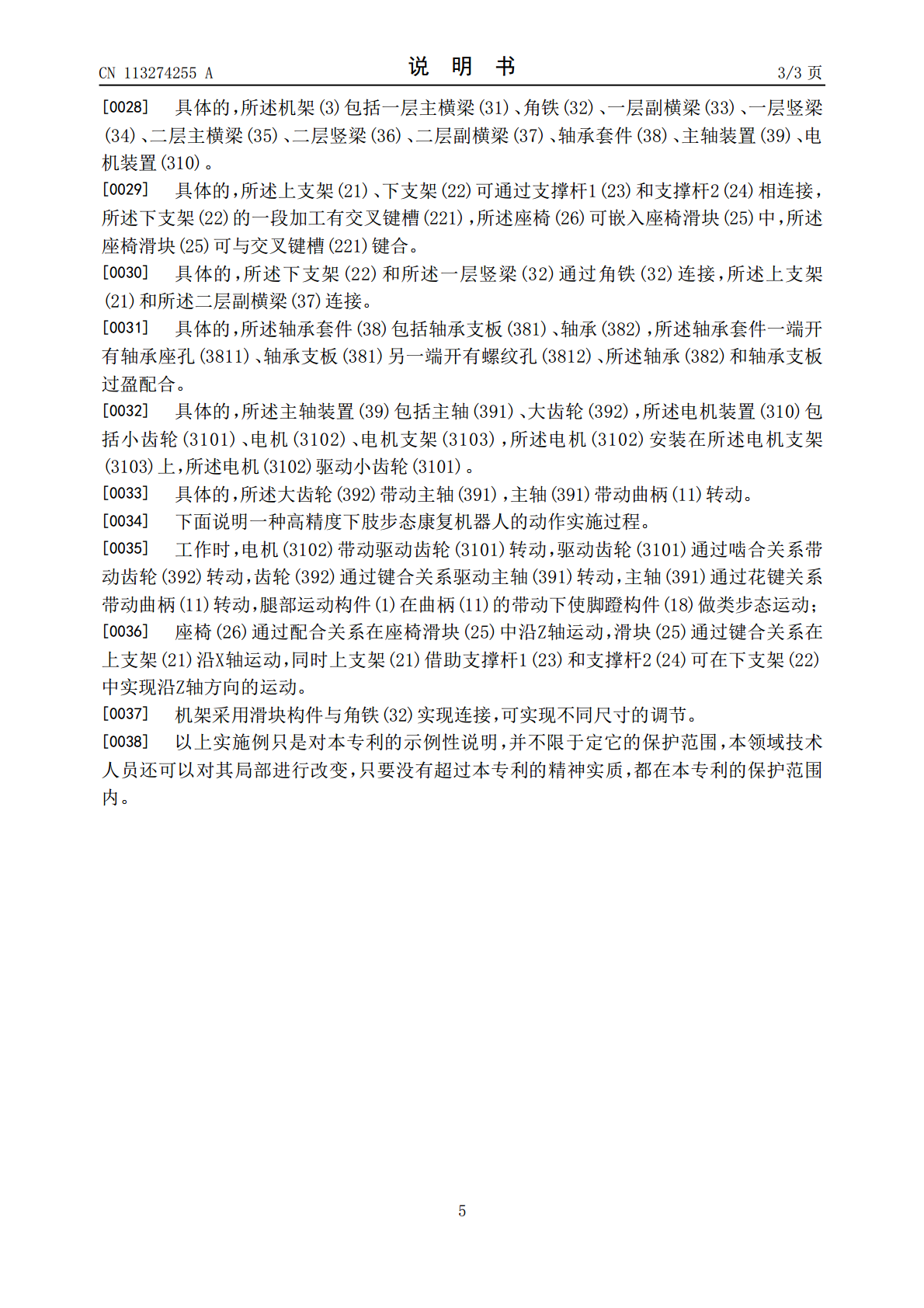
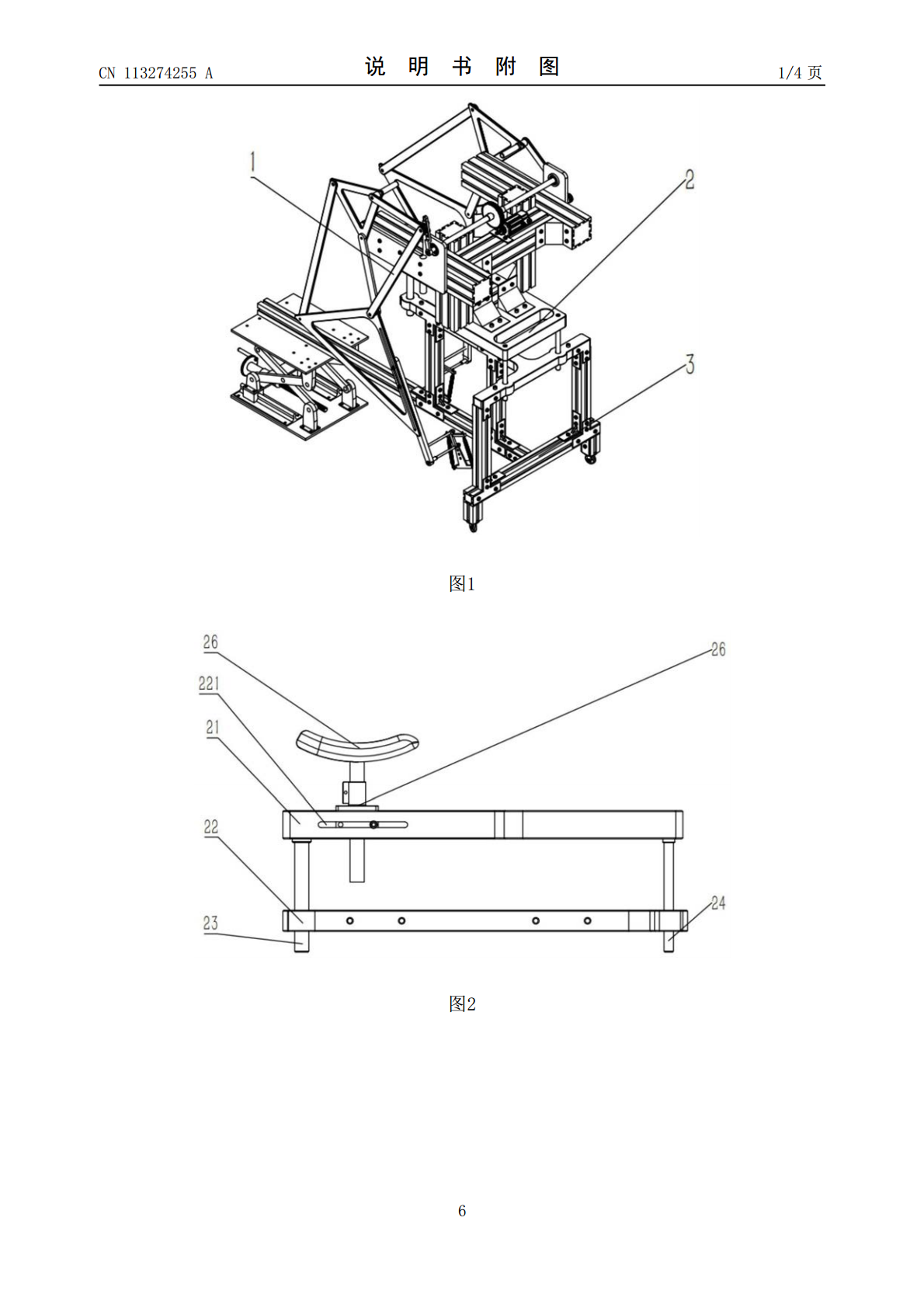
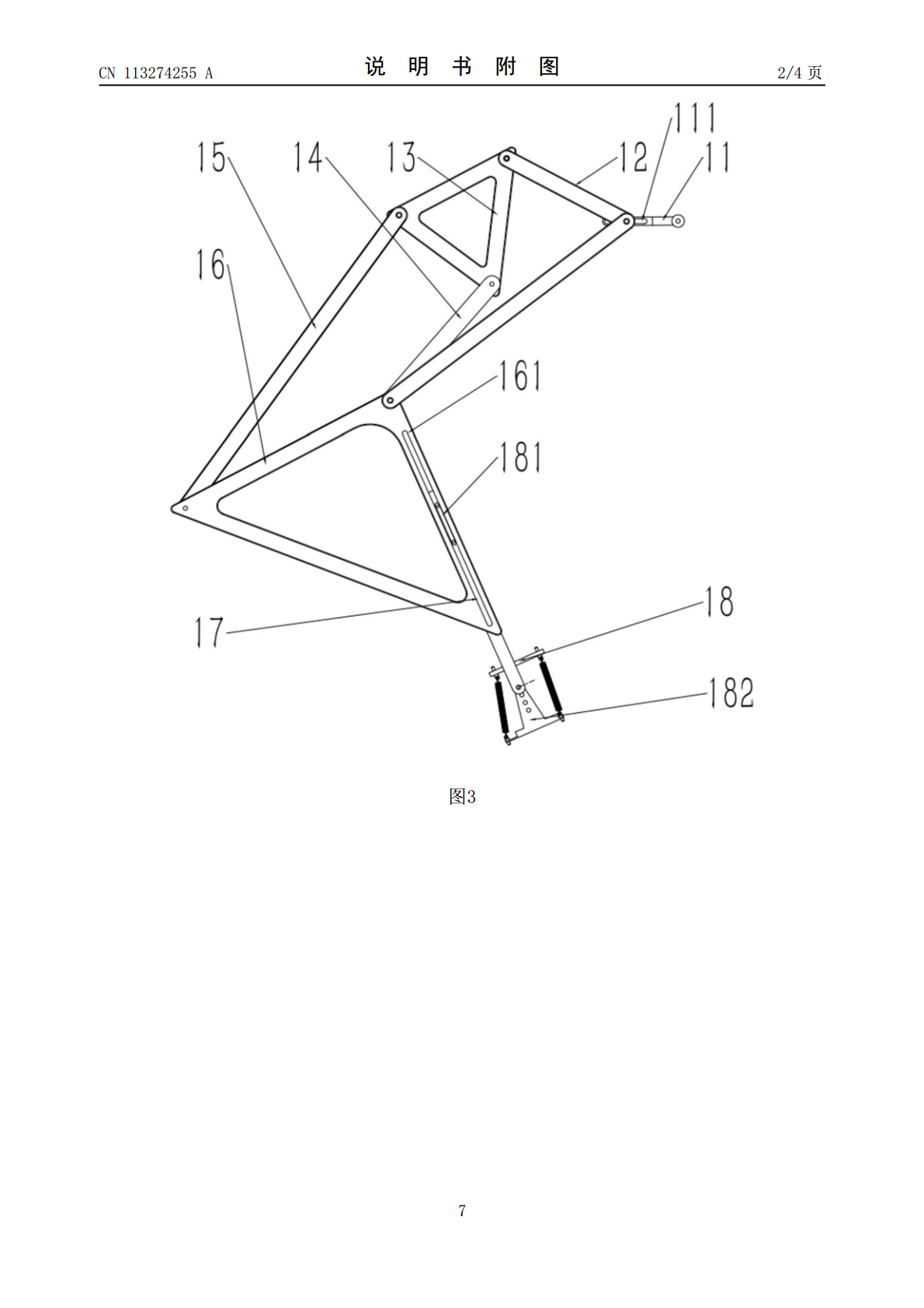
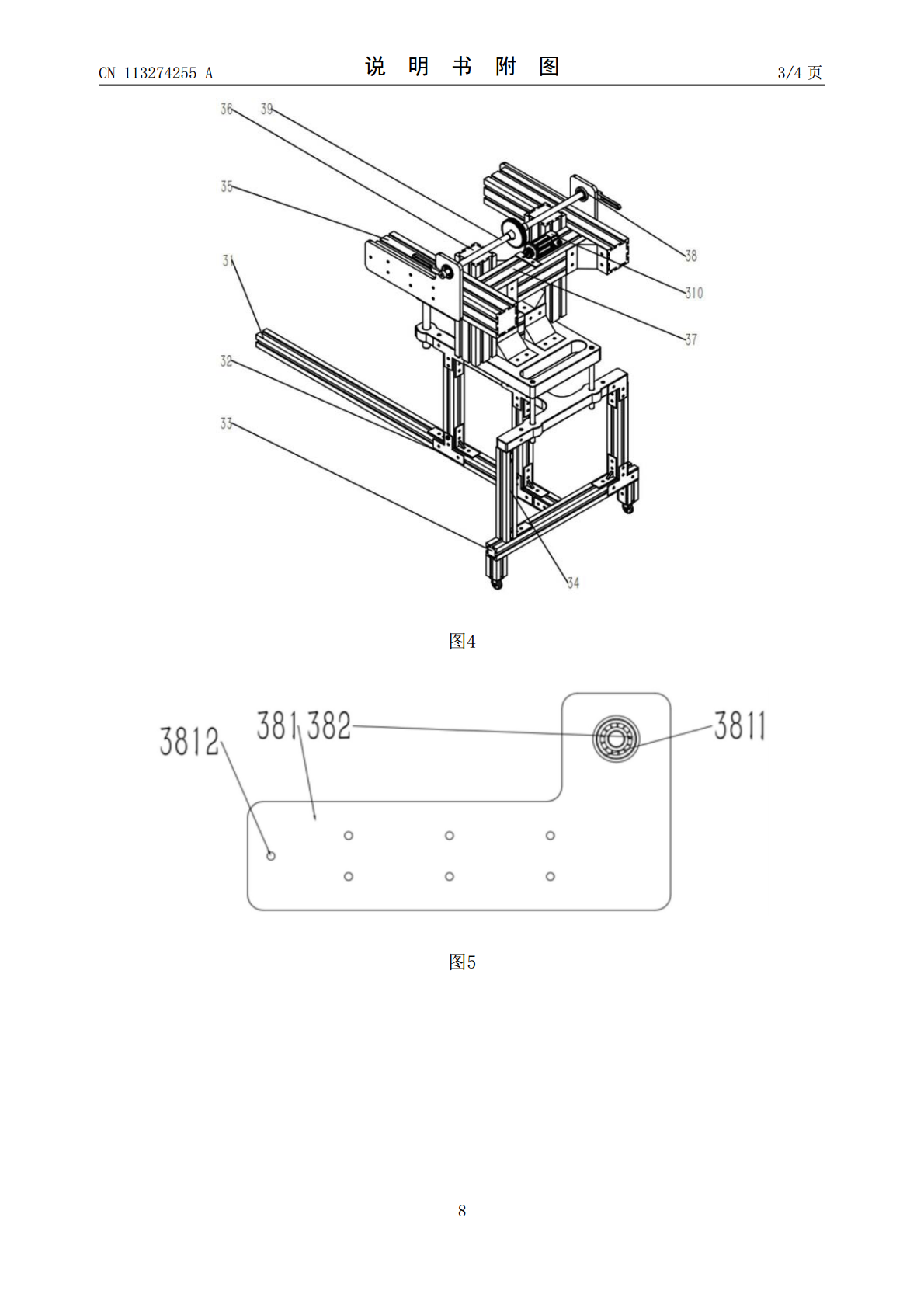
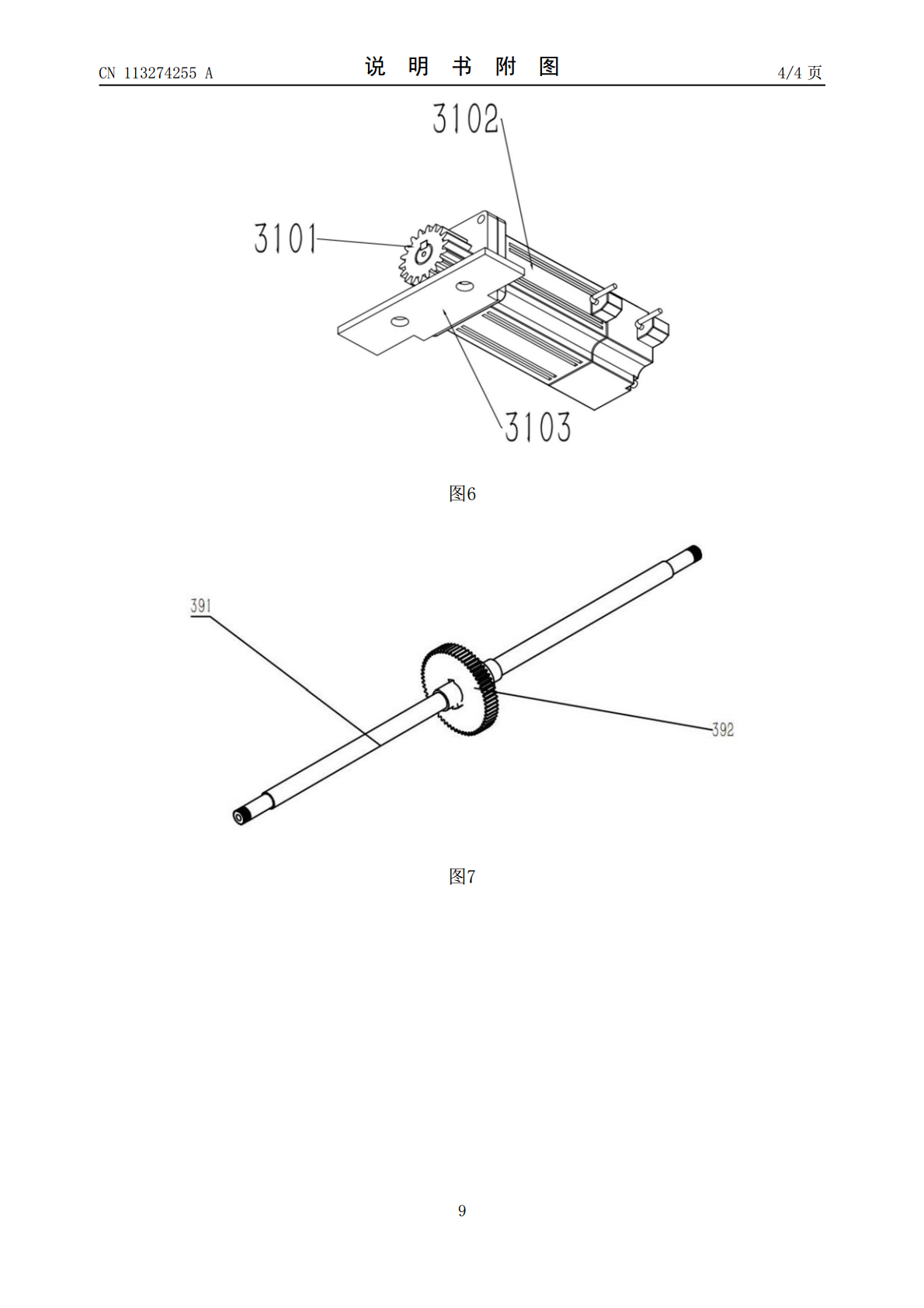
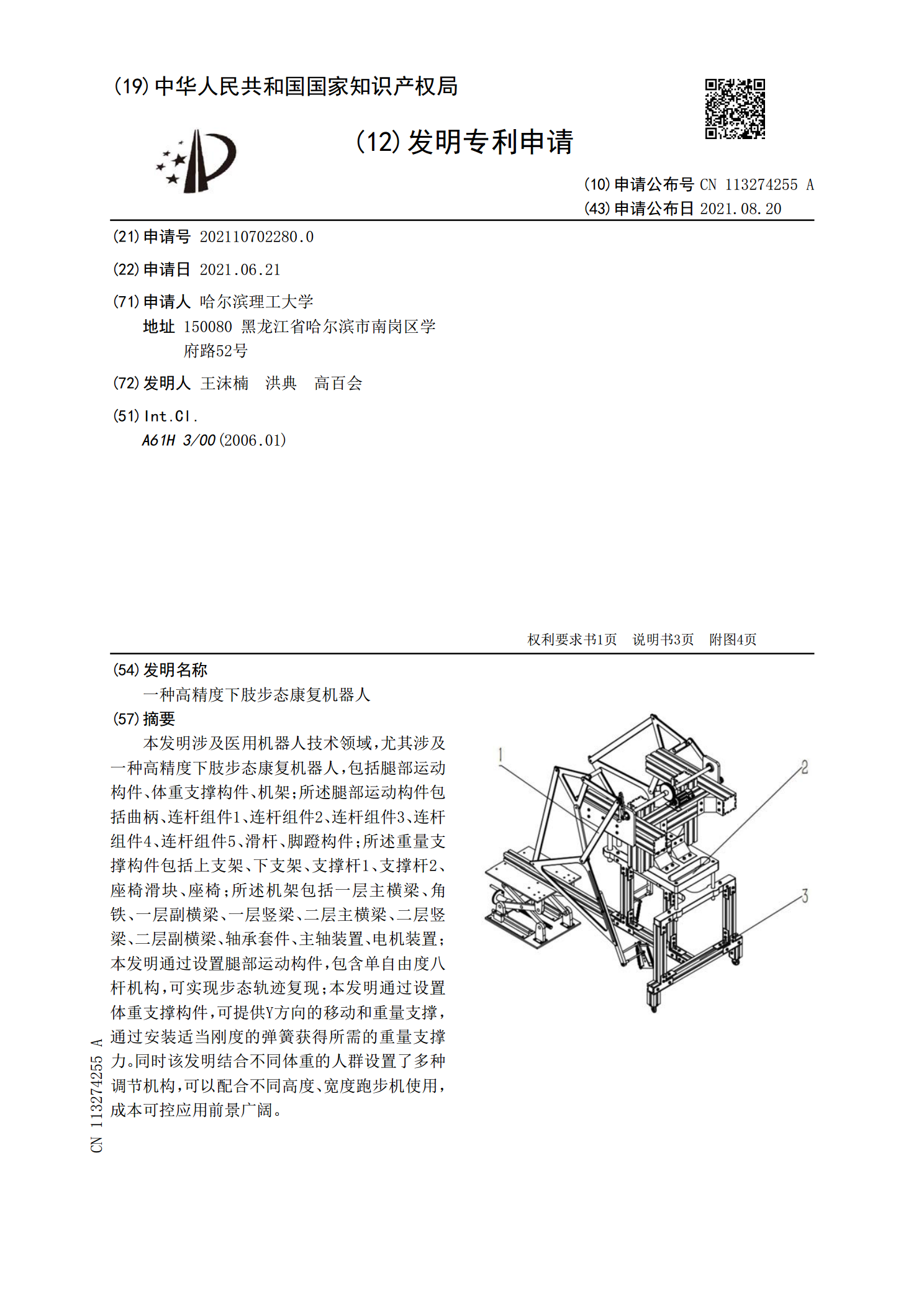
本发明涉及医用机器人技术领域,尤其涉及一种高精度下肢步态康复机器人,包括腿部运动构件、体重支撑构件、机架;所述腿部运动构件包括曲柄、连杆组件1、连杆组件2、连杆组件3、连杆组件4、连杆组件5、滑杆、脚蹬构件;所述重量支撑构件包括上支架、下支架、支撑杆1、支撑杆2、座椅滑块、座椅;所述机架包括一层主横梁、角铁、一层副横梁、一层竖梁、二层主横梁、二层竖梁、二层副横梁、轴承套件、主轴装置、电机装置;本发明通过设置腿部运动构件,包含单自由度八杆机构,可实现步态轨迹复现;本发明通过设置体重支撑构件,可提供Y方向的移
一种穿戴式下肢康复机器人的步态规划及康复策略.pdf
WearableMasterGaitLimbsRehabilitationRobotPlanningandStrategyofLowerSupervisor:Prof.WangMaj:MachineryManufacturingQiangXihuaUniversityAutomationDegreeDissertationCandidate:XuStudentID:212009080201010aRulongApril,2012ClassifiexiIndex:UDC:or学位论文作者始鬣朊指导教师始彩.

一种步态训练康复机器人的下肢结构.pdf
本发明公开了一种步态训练康复机器人的下肢结构,属于医疗康复器械技术领域。它包括左髋关节部分、右髋关节部分以及左膝关节部分、右膝关节部分四个关节。传感器部分中,关节传感器通过与外压紧法兰、内压紧法兰、交叉滚子轴承配合,从而测得关节力矩值;驱动部分中关节电机与关节蜗轮蜗杆减速器固定,关节蜗轮蜗杆减速器通过与关节减速器法兰配合将扭矩输出给关节力矩传感器内圈,从而驱动关节转动。本发明中关节处力矩传感器结构能够实时读取关节处力矩值,从而能够实现力控制,以及实现被动训练,主动训练等康复训练的功能。

剪刀步态下肢屈膝的家庭康复及训练.ppt
脑瘫患儿的“剪刀步态”是痉挛型脑瘫的一种比较普遍的表现形式,是脑瘫的症状之一,即肌张力增加,腱反射亢进,表现为髋关节屈曲,内收、内旋,足下垂及内翻,行走时双膝互相摩擦,甚至两腿完全交叉,呈典型的“剪刀式”步态。由于双下肢肌张力增高,尤以伸肌肉内张力增高明显,移步时下肢内收过度,两腿交叉呈剪刀状。脑瘫屈膝常常是脑瘫孩子没有正确方法或适宜数量功能训练的结果。造成屈膝最主要的原因是控制膝关节屈曲肌群的痉挛没有及时阻抑,对抗它的拮抗肌肌力没有有效增强。可促成膝关节屈曲的痉挛肌群主要是大腿后外侧,大腿后侧肌群收缩时
一种多功能下肢药浴及步态康复装置.pdf
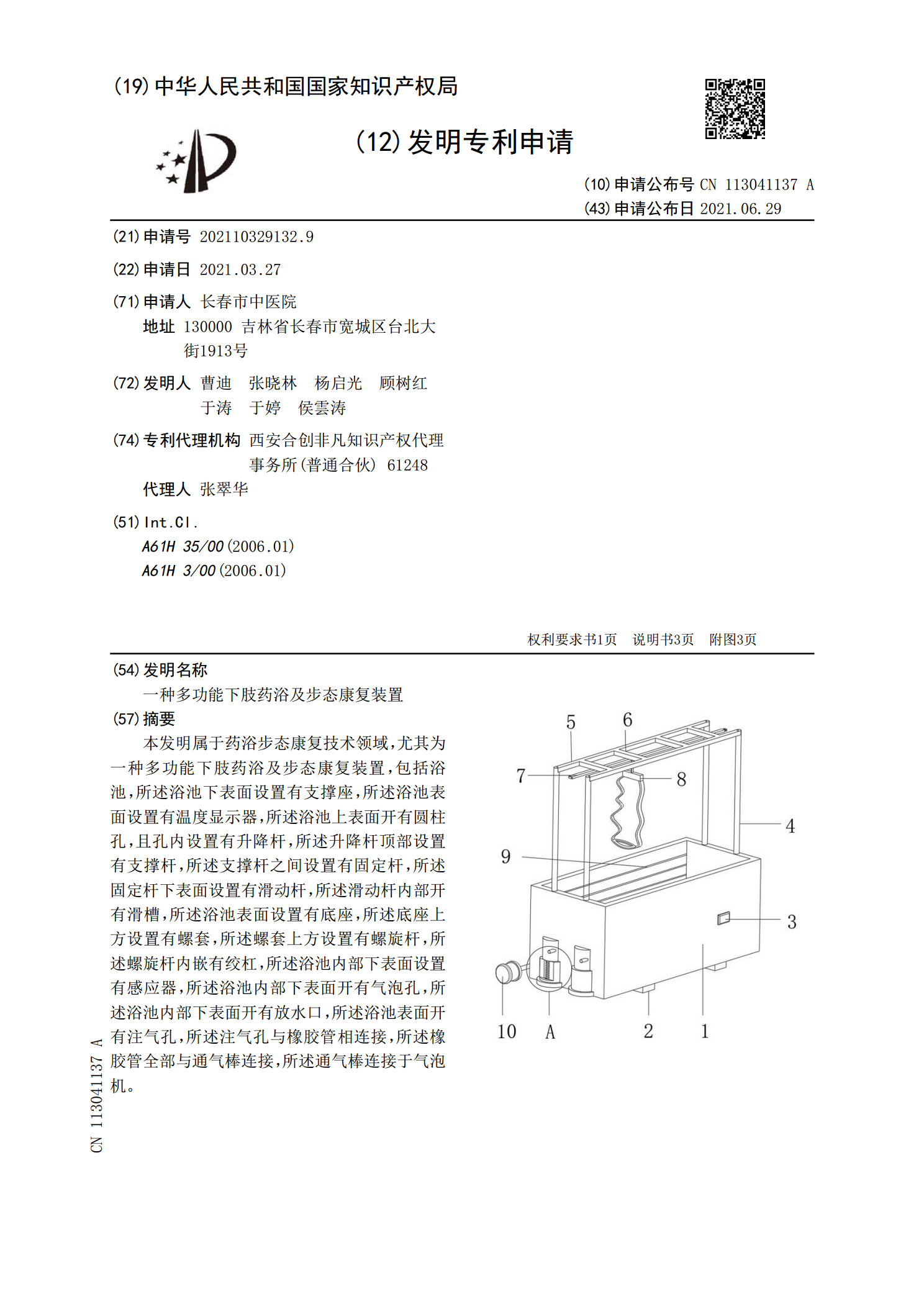
本发明属于药浴步态康复技术领域,尤其为一种多功能下肢药浴及步态康复装置,包括浴池,所述浴池下表面设置有支撑座,所述浴池表面设置有温度显示器,所述浴池上表面开有圆柱孔,且孔内设置有升降杆,所述升降杆顶部设置有支撑杆,所述支撑杆之间设置有固定杆,所述固定杆下表面设置有滑动杆,所述滑动杆内部开有滑槽,所述浴池表面设置有底座,所述底座上方设置有螺套,所述螺套上方设置有螺旋杆,所述螺旋杆内嵌有绞杠,所述浴池内部下表面设置有感应器,所述浴池内部下表面开有气泡孔,所述浴池内部下表面开有放水口,所述浴池表面开有注气孔,所