
基于变刚度的外肢体机器人辅助支撑方法.pdf

纪阳****公主


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于变刚度的外肢体机器人辅助支撑方法.pdf
本发明公开了一种基于变刚度的外肢体机器人辅助支撑方法,先获取表面肌电传感器和惯性传感器的数据;对惯性传感器的数据进行处理,判断穿戴者是否有操作意图;对表面肌电传感器的数据进行预处理,包括全波整流、低通滤波和归一化;预处理后的表面肌电信号用于穿戴者手臂的参考刚度估计;手臂参考刚度映射到外肢体机器人的阻抗控制模型中。该方法利用人体手臂刚度和机械臂刚度协调的方法,实现了人和外肢体在过顶支撑任务中的人机协同,可以减少任务中人员的投入。当穿戴者手臂刚度减少时,机械臂刚度增大,外肢体可以在操作者疲劳时产生更大的支撑力
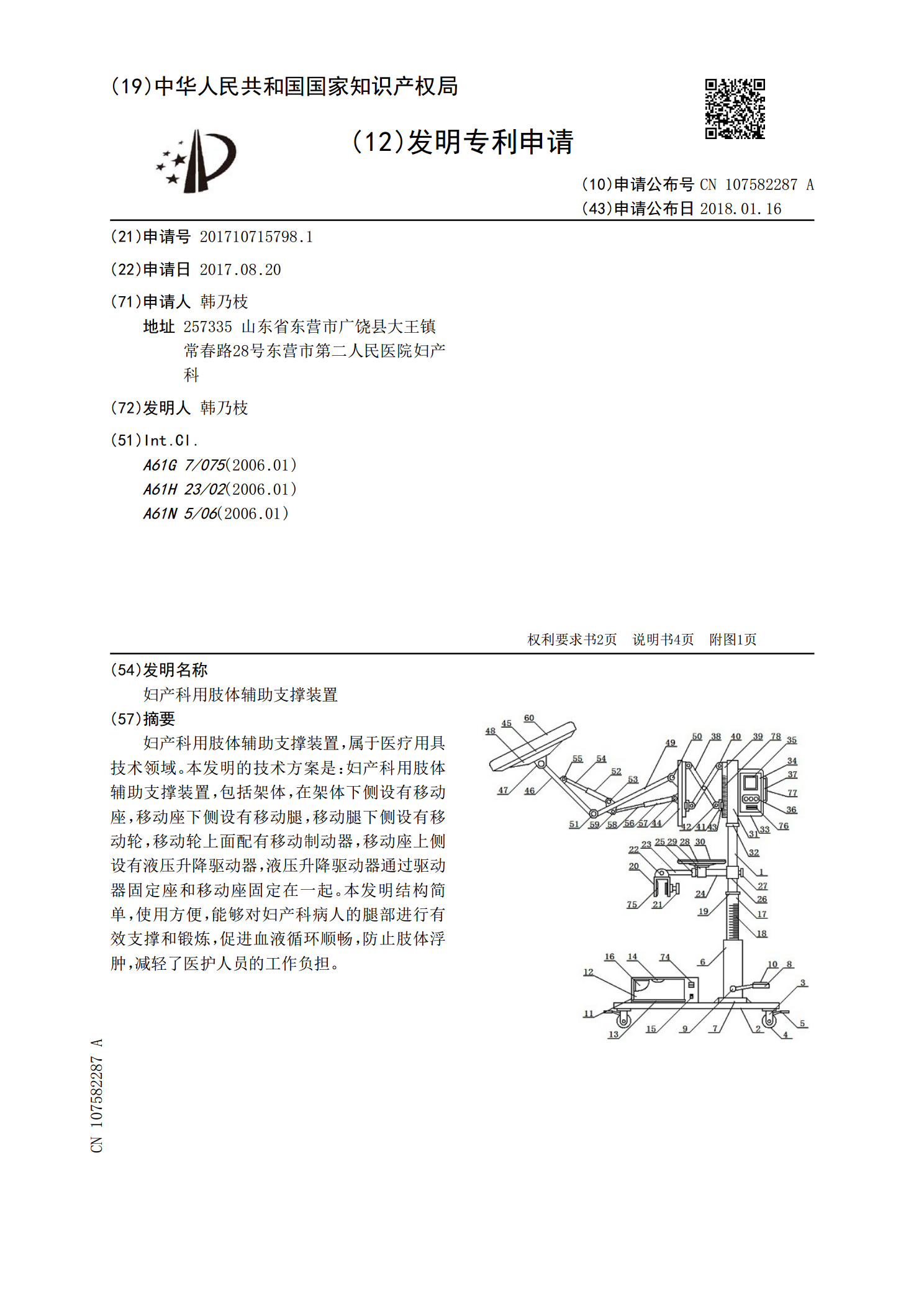
妇产科用肢体辅助支撑装置.pdf
妇产科用肢体辅助支撑装置,属于医疗用具技术领域。本发明的技术方案是:妇产科用肢体辅助支撑装置,包括架体,在架体下侧设有移动座,移动座下侧设有移动腿,移动腿下侧设有移动轮,移动轮上面配有移动制动器,移动座上侧设有液压升降驱动器,液压升降驱动器通过驱动器固定座和移动座固定在一起。本发明结构简单,使用方便,能够对妇产科病人的腿部进行有效支撑和锻炼,促进血液循环顺畅,防止肢体浮肿,减轻了医护人员的工作负担。
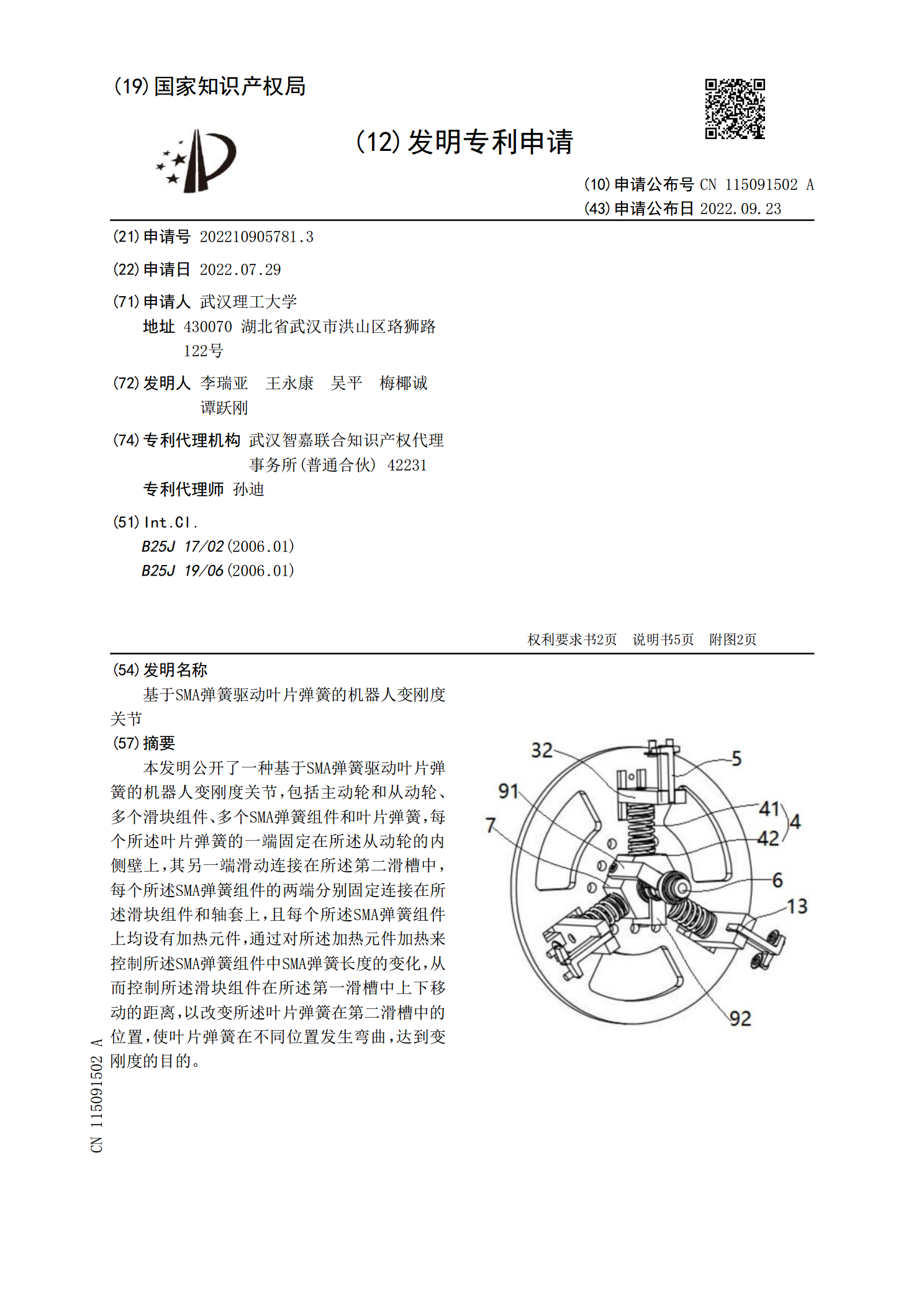
基于SMA弹簧驱动叶片弹簧的机器人变刚度关节.pdf
本发明公开了一种基于SMA弹簧驱动叶片弹簧的机器人变刚度关节,包括主动轮和从动轮、多个滑块组件、多个SMA弹簧组件和叶片弹簧,每个所述叶片弹簧的一端固定在所述从动轮的内侧壁上,其另一端滑动连接在所述第二滑槽中,每个所述SMA弹簧组件的两端分别固定连接在所述滑块组件和轴套上,且每个所述SMA弹簧组件上均设有加热元件,通过对所述加热元件加热来控制所述SMA弹簧组件中SMA弹簧长度的变化,从而控制所述滑块组件在所述第一滑槽中上下移动的距离,以改变所述叶片弹簧在第二滑槽中的位置,使叶片弹簧在不同位置发生弯曲,达到

变刚度放大阻尼耗能支撑体系.pdf
本发明公开了一种变刚度放大阻尼耗能支撑体系,包括:建筑主体;第一放大阻尼斜支撑,第一放大阻尼斜支撑包括第一上支撑杆和第一下支撑杆;第二放大阻尼斜支撑,第二放大阻尼斜支撑包括第二上支撑杆和第二下支撑杆;阻尼器,阻尼器具有剪切耗能和轴向刚度,阻尼器的一端与第一上支撑杆和第一下支撑杆刚性连接,阻尼器的另一端与第二上支撑杆和第二下支撑杆刚性连接,随着建筑主体的变形逐渐增大,阻尼器的轴向与第一上支撑杆、第一下支撑杆、第二上支撑杆和第二下支撑杆中的至少一个的轴向逐渐重合。根据本发明实施例的变刚度放大阻尼耗能支撑体系能

一种基于变刚度原理的机器人安全关节装置.pdf
本发明公开了基于变刚度原理的机器人安全关节装置,主要用来在机器人出现过载等突发事故中对人及机器进行保护。安全关节主要包括转动模块、支撑架、弹性体模块、导向模块、基座模块五部分。本发明将变刚度机构与机器人关节的概念结合,具有刚柔耦合的效果,通过对凸轮廓线的设计获得良好的受力边界条件,使安全关节具有更高的刚度阈值控制精度以及运行稳定性,采用新型的可加工弹簧,保证了更精准的刚度、更高的强度及更好的稳定性,同时便于整体结构的小型化。