
一种多吊机集成运行平台回转系统.pdf

猫巷****志敏


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种多吊机集成运行平台回转系统.pdf
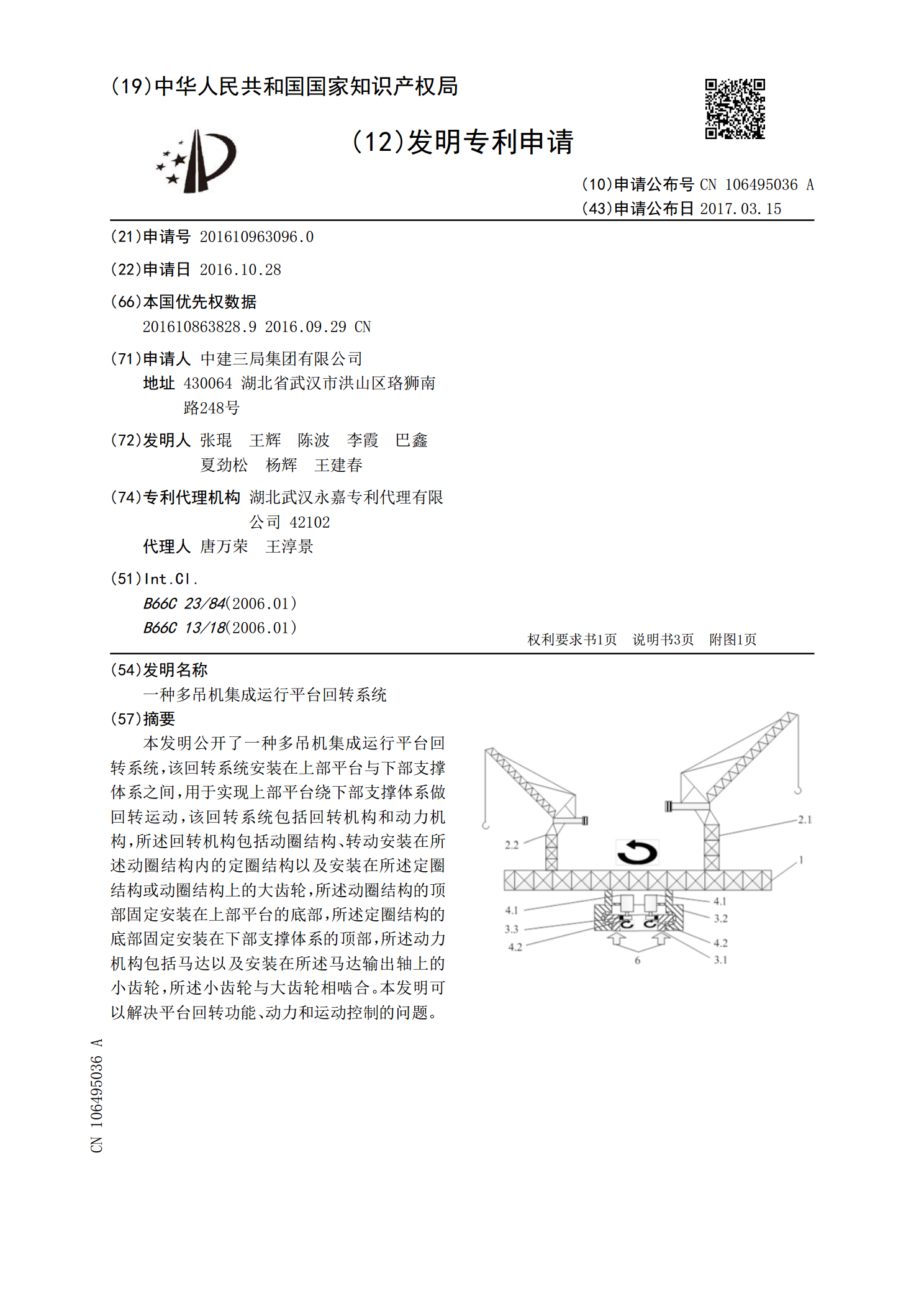
本发明公开了一种多吊机集成运行平台回转系统,该回转系统安装在上部平台与下部支撑体系之间,用于实现上部平台绕下部支撑体系做回转运动,该回转系统包括回转机构和动力机构,所述回转机构包括动圈结构、转动安装在所述动圈结构内的定圈结构以及安装在所述定圈结构或动圈结构上的大齿轮,所述动圈结构的顶部固定安装在上部平台的底部,所述定圈结构的底部固定安装在下部支撑体系的顶部,所述动力机构包括马达以及安装在所述马达输出轴上的小齿轮,所述小齿轮与大齿轮相啮合。本发明可以解决平台回转功能、动力和运动控制的问题。
一种整体自动顶升廻转式多吊机基座运行平台.pdf
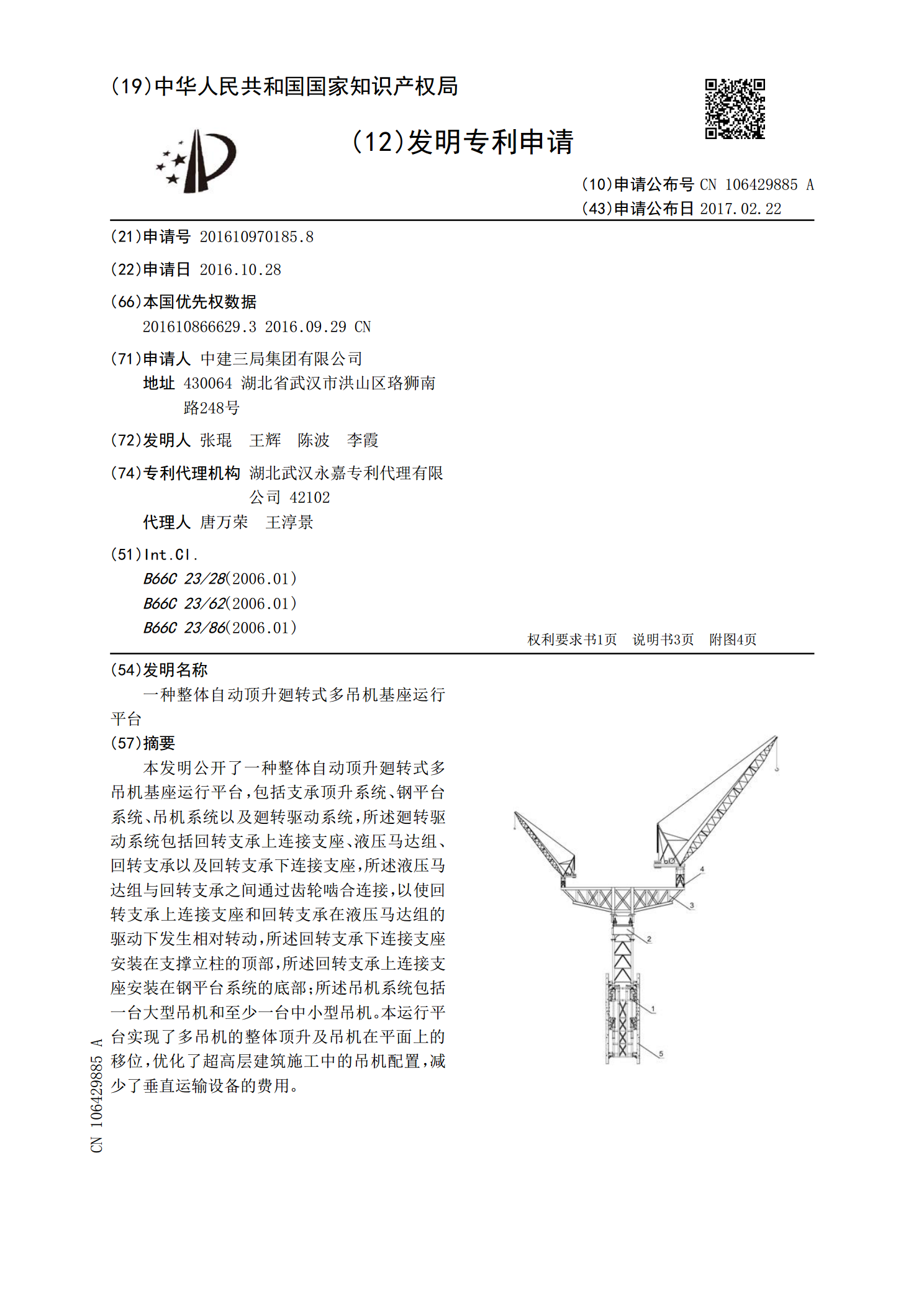
本发明公开了一种整体自动顶升廻转式多吊机基座运行平台,包括支承顶升系统、钢平台系统、吊机系统以及廻转驱动系统,所述廻转驱动系统包括回转支承上连接支座、液压马达组、回转支承以及回转支承下连接支座,所述液压马达组与回转支承之间通过齿轮啮合连接,以使回转支承上连接支座和回转支承在液压马达组的驱动下发生相对转动,所述回转支承下连接支座安装在支撑立柱的顶部,所述回转支承上连接支座安装在钢平台系统的底部;所述吊机系统包括一台大型吊机和至少一台中小型吊机。本运行平台实现了多吊机的整体顶升及吊机在平面上的移位,优化了超高
一种基于虚拟机的多平台集成车载娱乐通讯系统.pdf
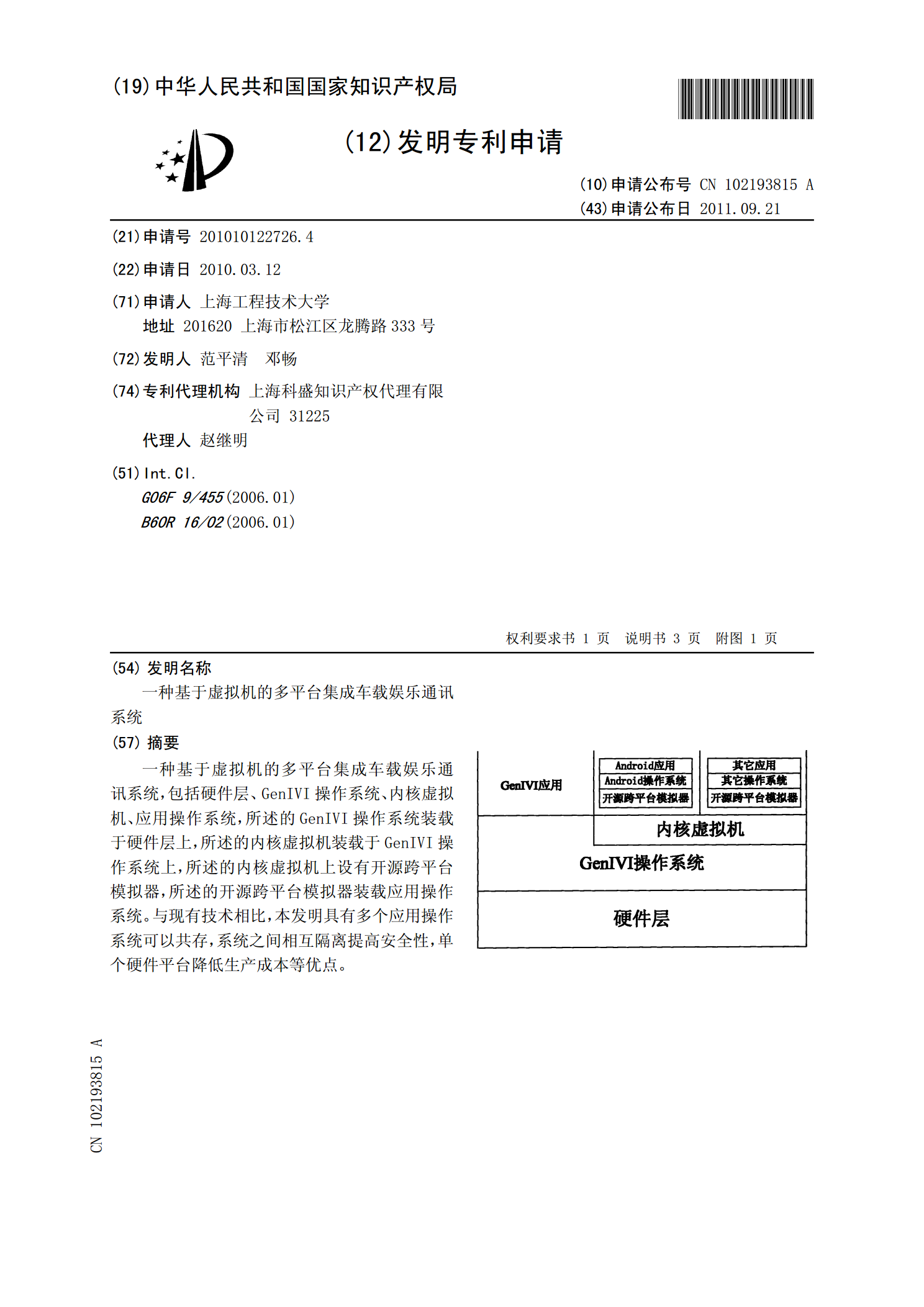
一种基于虚拟机的多平台集成车载娱乐通讯系统,包括硬件层、GenIVI操作系统、内核虚拟机、应用操作系统,所述的GenIVI操作系统装载于硬件层上,所述的内核虚拟机装载于GenIVI操作系统上,所述的内核虚拟机上设有开源跨平台模拟器,所述的开源跨平台模拟器装载应用操作系统。与现有技术相比,本发明具有多个应用操作系统可以共存,系统之间相互隔离提高安全性,单个硬件平台降低生产成本等优点。

一种气动型全回转吊机.pdf
本发明公开了一种气动型全回转吊机,包括基座、吊装支架和卷扬机构,卷扬机构通过吊绳连接吊钩;吊装支架由固定套筒、回转轴和回转吊臂组成;回转轴在蜗轮蜗杆机构的驱动下作回转运动,蜗轮蜗杆机构包括设置在回转轴下端的蜗轮和设置在固定套筒中的蜗杆,蜗杆的两端各设有伸出固定套筒的操作头;卷扬机构具有设置在回转轴上的气动卷扬机,气动卷扬机的通气管路包括设置在固定套筒内的管路A和设置在回转轴内的管路B,其中管路A和管路B之间通过回转接头相连接;本发明结构简单、操作便捷、安全可靠,并且实现了全回转操作,大大提高了吊装操作的效

一种管片吊运行装置及管片吊机.pdf
本发明具体公开了一种管片吊运行装置,包括:机架;悬挂轮,两组悬挂轮间隔设置,悬挂轮转动安装在机架上且能够悬挂在轨道上,并与轨道滚动配合;驱动电机,安装在机架上;链轮,驱动电机与链轮传动连接,链轮能够和安装在轨道上的滚子链啮合,链轮和悬挂轮分置于滚子链的两侧;辅助轮,转动安装在机架上,且和悬挂轮位于滚子链的同一侧,辅助轮被配置为,在轨道的折弯处,辅助轮能够与轨道滚动配合,且链轮能够与滚子链啮合,从而可以通过辅助轮以及两组悬挂轮限定该管片吊运行装置与滚子链的相对位置,同时,使链轮在此时能够与滚子链啮合,保证该