
下肢康复训练外骨骼系统及其步行控制方法与髋关节结构.pdf

春兰****89

1/10

2/10
3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
下肢康复训练外骨骼系统及其步行控制方法与髋关节结构.pdf
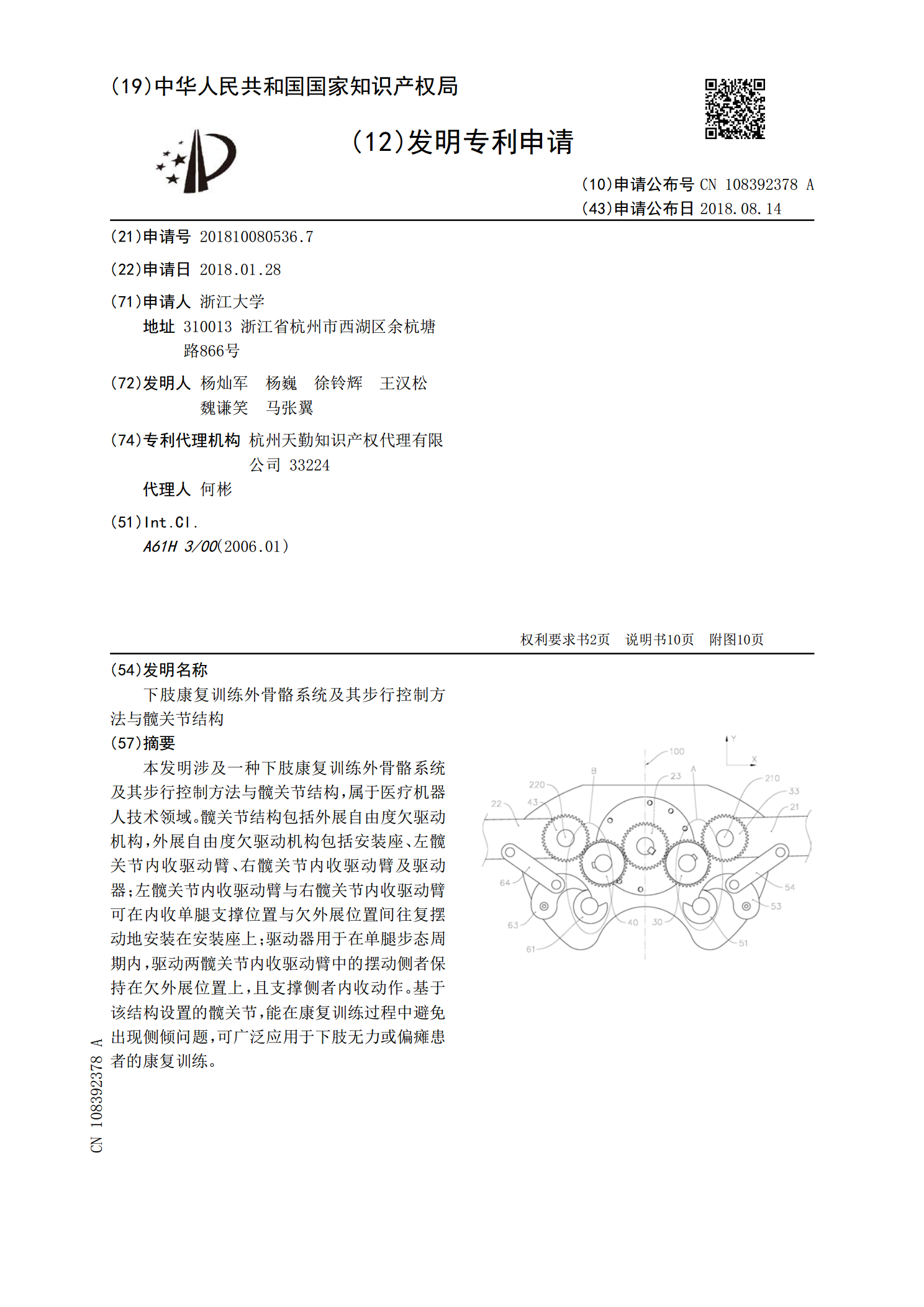
本发明涉及一种下肢康复训练外骨骼系统及其步行控制方法与髋关节结构,属于医疗机器人技术领域。髋关节结构包括外展自由度欠驱动机构,外展自由度欠驱动机构包括安装座、左髋关节内收驱动臂、右髋关节内收驱动臂及驱动器;左髋关节内收驱动臂与右髋关节内收驱动臂可在内收单腿支撑位置与欠外展位置间往复摆动地安装在安装座上;驱动器用于在单腿步态周期内,驱动两髋关节内收驱动臂中的摆动侧者保持在欠外展位置上,且支撑侧者内收动作。基于该结构设置的髋关节,能在康复训练过程中避免出现侧倾问题,可广泛应用于下肢无力或偏瘫患者的康复训练。
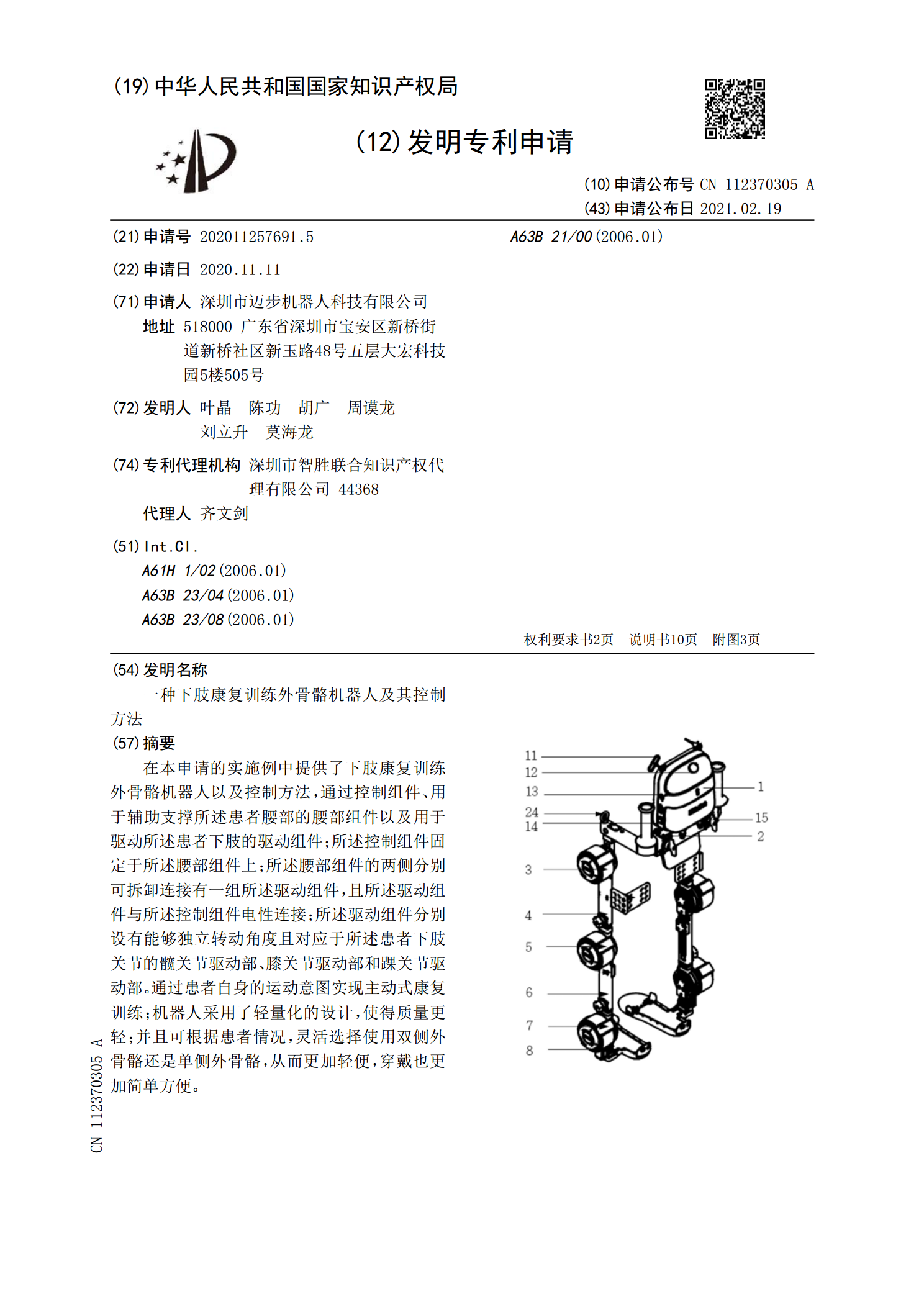
一种下肢康复训练外骨骼机器人及其控制方法.pdf
在本申请的实施例中提供了下肢康复训练外骨骼机器人以及控制方法,通过控制组件、用于辅助支撑所述患者腰部的腰部组件以及用于驱动所述患者下肢的驱动组件;所述控制组件固定于所述腰部组件上;所述腰部组件的两侧分别可拆卸连接有一组所述驱动组件,且所述驱动组件与所述控制组件电性连接;所述驱动组件分别设有能够独立转动角度且对应于所述患者下肢关节的髋关节驱动部、膝关节驱动部和踝关节驱动部。通过患者自身的运动意图实现主动式康复训练;机器人采用了轻量化的设计,使得质量更轻;并且可根据患者情况,灵活选择使用双侧外骨骼还是单侧外骨
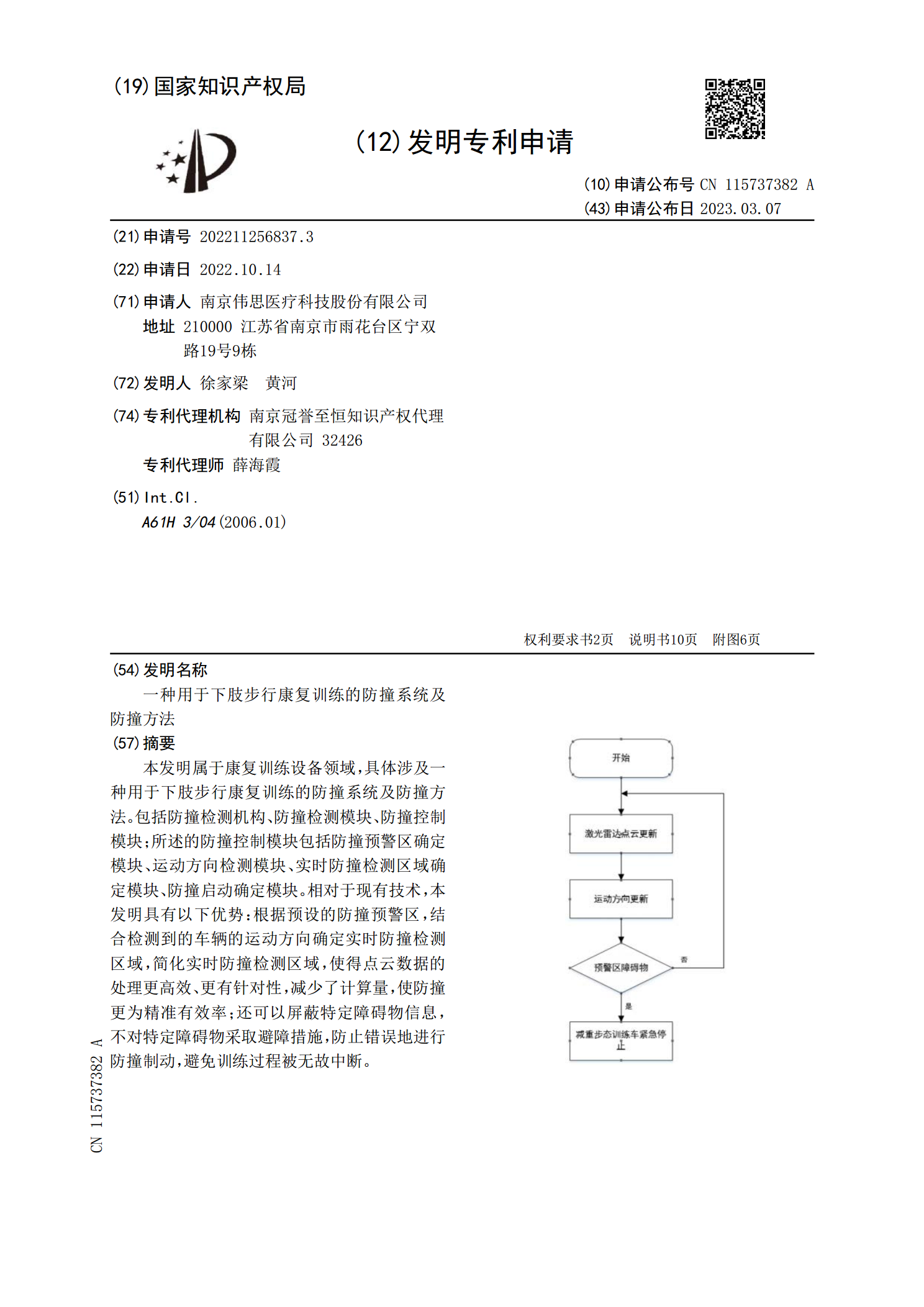
一种用于下肢步行康复训练的防撞系统及防撞方法.pdf
本发明属于康复训练设备领域,具体涉及一种用于下肢步行康复训练的防撞系统及防撞方法。包括防撞检测机构、防撞检测模块、防撞控制模块;所述的防撞控制模块包括防撞预警区确定模块、运动方向检测模块、实时防撞检测区域确定模块、防撞启动确定模块。相对于现有技术,本发明具有以下优势:根据预设的防撞预警区,结合检测到的车辆的运动方向确定实时防撞检测区域,简化实时防撞检测区域,使得点云数据的处理更高效、更有针对性,减少了计算量,使防撞更为精准有效率;还可以屏蔽特定障碍物信息,不对特定障碍物采取避障措施,防止错误地进行防撞制动
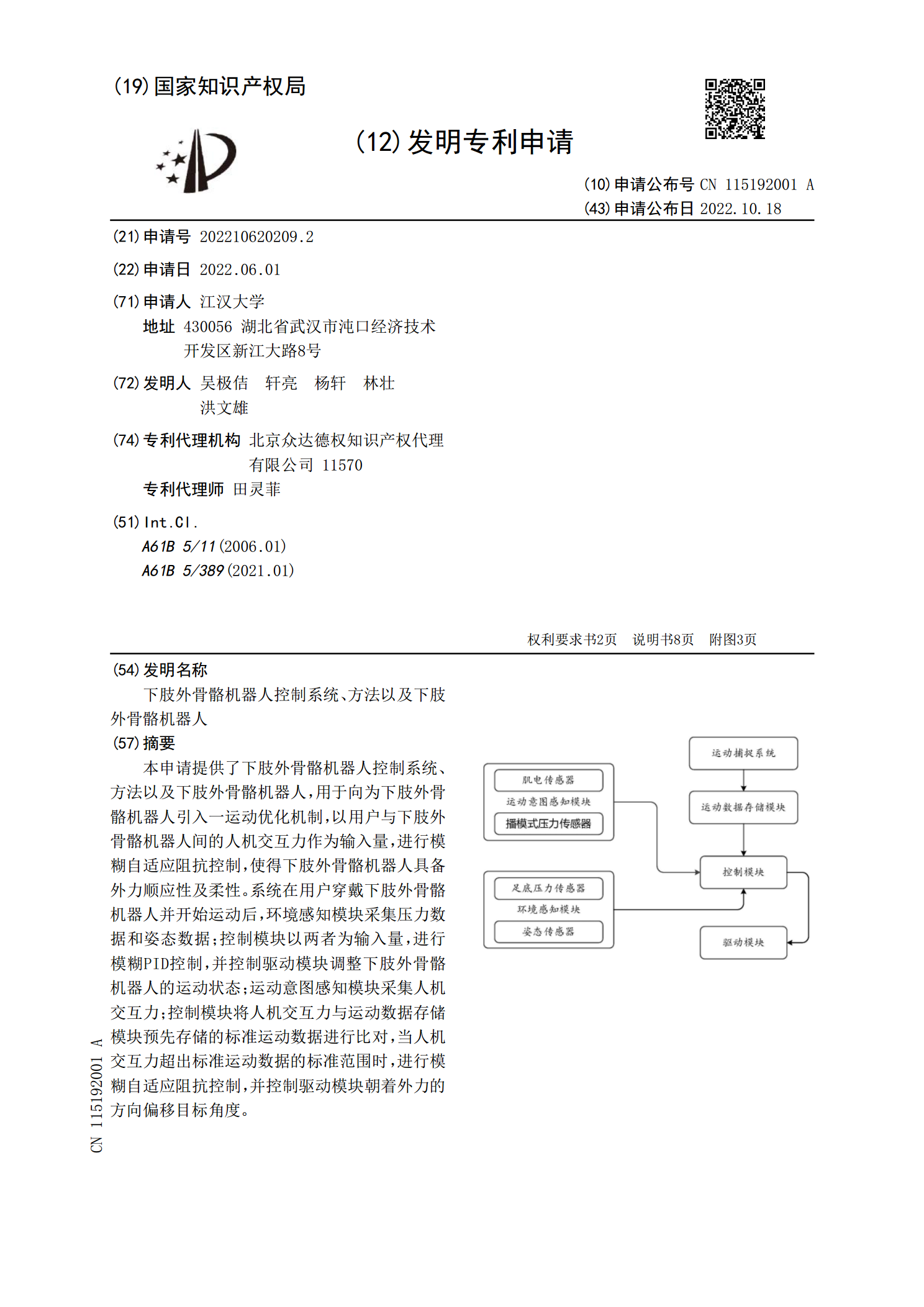
下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人.pdf
本申请提供了下肢外骨骼机器人控制系统、方法以及下肢外骨骼机器人,用于向为下肢外骨骼机器人引入一运动优化机制,以用户与下肢外骨骼机器人间的人机交互力作为输入量,进行模糊自适应阻抗控制,使得下肢外骨骼机器人具备外力顺应性及柔性。系统在用户穿戴下肢外骨骼机器人并开始运动后,环境感知模块采集压力数据和姿态数据;控制模块以两者为输入量,进行模糊PID控制,并控制驱动模块调整下肢外骨骼机器人的运动状态;运动意图感知模块采集人机交互力;控制模块将人机交互力与运动数据存储模块预先存储的标准运动数据进行比对,当人机交互力超
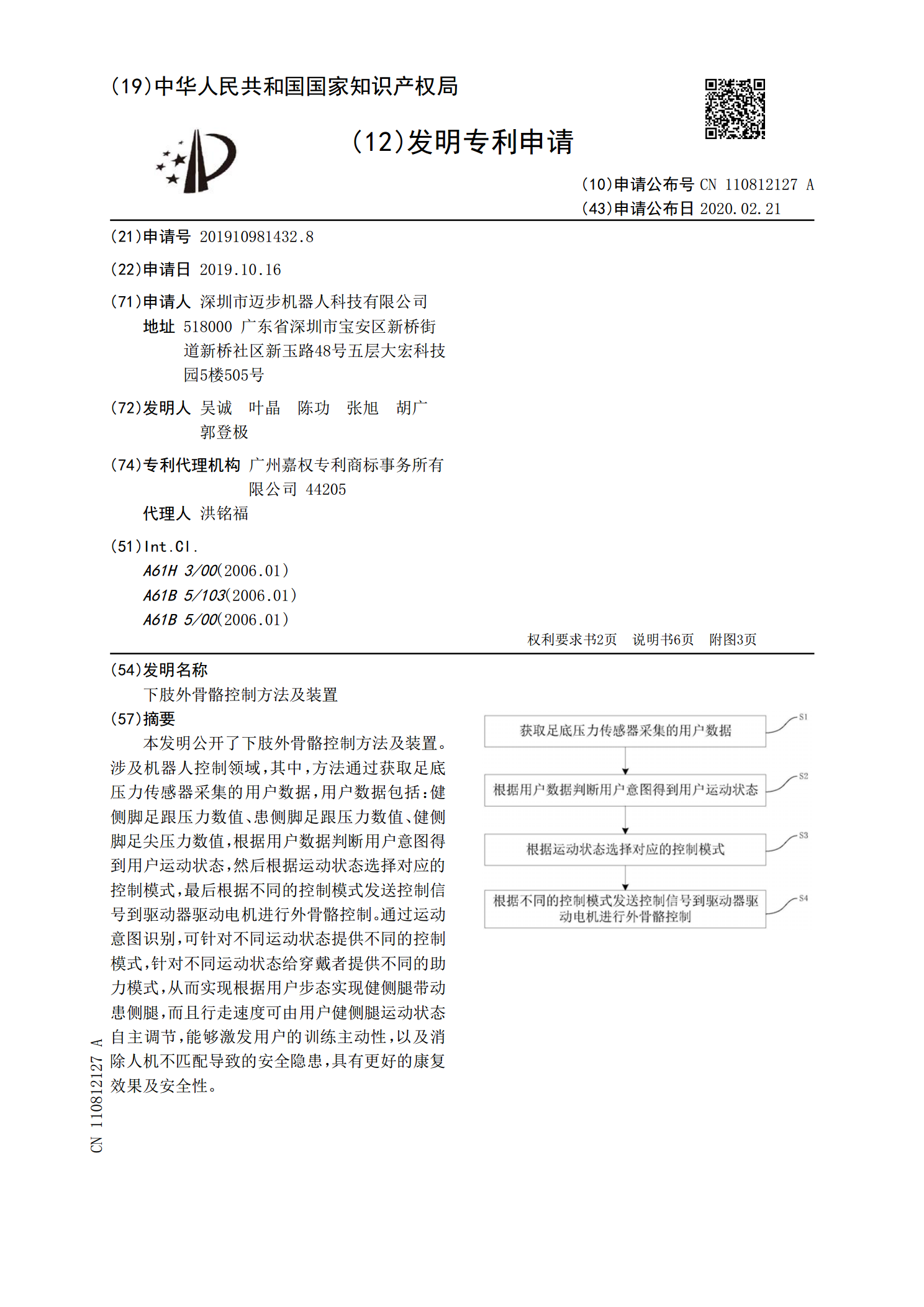
下肢外骨骼控制方法及装置.pdf
本发明公开了下肢外骨骼控制方法及装置。涉及机器人控制领域,其中,方法通过获取足底压力传感器采集的用户数据,用户数据包括:健侧脚足跟压力数值、患侧脚足跟压力数值、健侧脚足尖压力数值,根据用户数据判断用户意图得到用户运动状态,然后根据运动状态选择对应的控制模式,最后根据不同的控制模式发送控制信号到驱动器驱动电机进行外骨骼控制。通过运动意图识别,可针对不同运动状态提供不同的控制模式,针对不同运动状态给穿戴者提供不同的助力模式,从而实现根据用户步态实现健侧腿带动患侧腿,而且行走速度可由用户健侧腿运动状态自主调节,