
一种新型自动泊车机器人.pdf

是笛****加盟

1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种新型自动泊车机器人.pdf
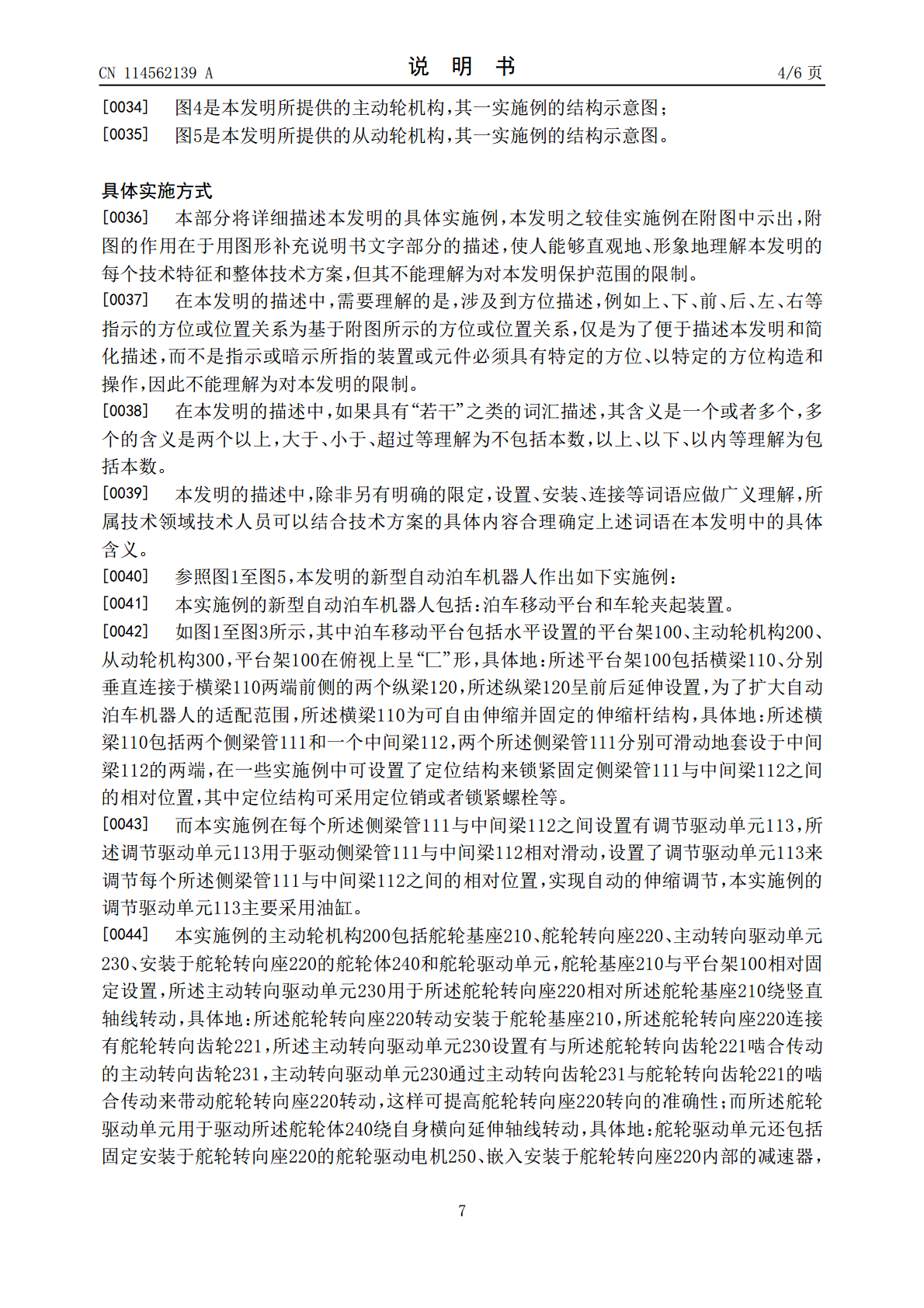
本发明公开了一种新型自动泊车机器人,包括泊车移动平台和车轮夹起装置,泊车移动平台包括平台架、主动轮机构、从动轮机构,平台架包括横梁、分别垂直连接于横梁两端前侧的两个纵梁,在平台架底部四个支撑位设置有至少一个主动轮机构和至少一个从动轮机构;车轮夹起装置包括至少两个以上夹持叉臂组件,至少两个以上夹持叉臂组件呈横向间隔设置于两个纵梁之间,夹持叉臂组件包括两个叉臂体、用于驱动两个叉臂体在横向上相互靠近或者远离的夹持驱动构件、用于驱动两个叉臂体在横向上同步移动的夹持调节驱动构件、用于驱动两个叉臂体上下移动的升降驱动

一种泊车机器人自动泊车的方法.pdf
本发明公开了一种泊车机器人自动泊车的方法,包括以下步骤:S1:首先设置停车区、机器人等候区、待停车区、出口和入口;S2:在停车机器人上安装多个雷达;S3:再在停车位上设置多个检测节点;S4:然后再在每个停车位上和每个待停车区上放置检测传感器;S5:再在购买了停车场的车位后,再在车辆的底部安装对应停车位的位置传感器;S6:再在停车机器人上安装轴距传感器,来检测车子的轴距;S7:在需要停车时,先将车子从入口驾驶到停车机器人等候区前的任意一个待停车区,本发明通过在泊车机器人上安装多个雷达,就可检测在泊车途中的异

一种全自动泊车机器人及其泊车方法.pdf
本发明公开了一种全自动泊车机器人,其中一种全自动泊车机器人及其泊车方法包括;车架组件和驱动装置,通过汽车停止在指定的区域,并且扫描指定区域位置二维码,进而将驱动装置带动着车体上面的载车架运动到汽车停止的区域,同时扫描车辆的体积信息,进而运动到汽车的底部,由举升组件将车辆举起,不接触到轮胎,减少了轮胎损伤,同时该机械人整个结构为一个矩形,结构紧凑牢固,同时采用双舵轮驱动,可以自由的转向,当运动到指定的停车区域,将停车区域信息发生至手机APP中,整个过程采用泊车机械人完成,节省了驾驶员停车时间,并且驾驶员能够
一种自动泊车系统.pdf
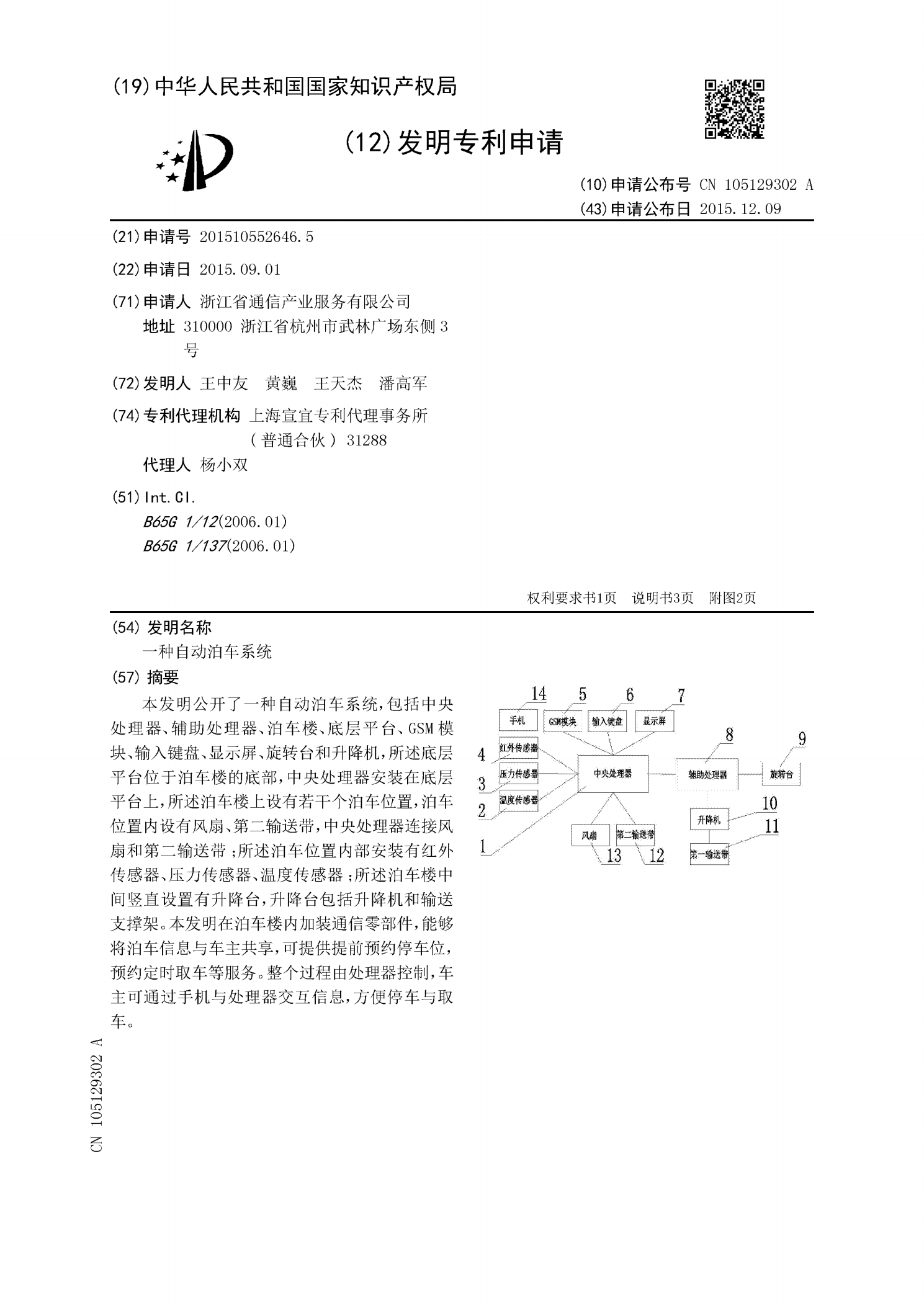
本发明公开了一种自动泊车系统,包括中央处理器、辅助处理器、泊车楼、底层平台、GSM模块、输入键盘、显示屏、旋转台和升降机,所述底层平台位于泊车楼的底部,中央处理器安装在底层平台上,所述泊车楼上设有若干个泊车位置,泊车位置内设有风扇、第二输送带,中央处理器连接风扇和第二输送带;所述泊车位置内部安装有红外传感器、压力传感器、温度传感器;所述泊车楼中间竖直设置有升降台,升降台包括升降机和输送支撑架。本发明在泊车楼内加装通信零部件,能够将泊车信息与车主共享,可提供提前预约停车位,预约定时取车等服务。整个过程由处理

一种新型自动洗澡机器人设备.pdf
本发明公开了一种新型自动洗澡机器人设备,包括淋浴房,淋浴房包含玻璃外墙、顶棚、淋浴房底座、铝材框架和玻璃门把手,淋浴房底座安装在铝材框架底部,顶棚安装于铝材框架的顶部,铝材框架的两侧及正面通过玻璃外墙封装形成房体结构,屏蔽罩的外表面中央处设置有垂直的轨道,轨道的顶部两侧和淋浴房位于正面两侧夹角处均安装有沐浴露水喷头,轨道上滑动连接有搓澡机构。本装置可以自动帮助人完成打湿全身,打上沐浴露,全身自动搓澡,并冲水的全过程,整个过程中,人只要坐在座位上,手扶着栏杆(洗背面时)或背靠栏杆(洗正面时),不需要其他动作