
调整支撑工件方法及可调式支撑工件系统.pdf

Ch****91

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

调整支撑工件方法及可调式支撑工件系统.pdf
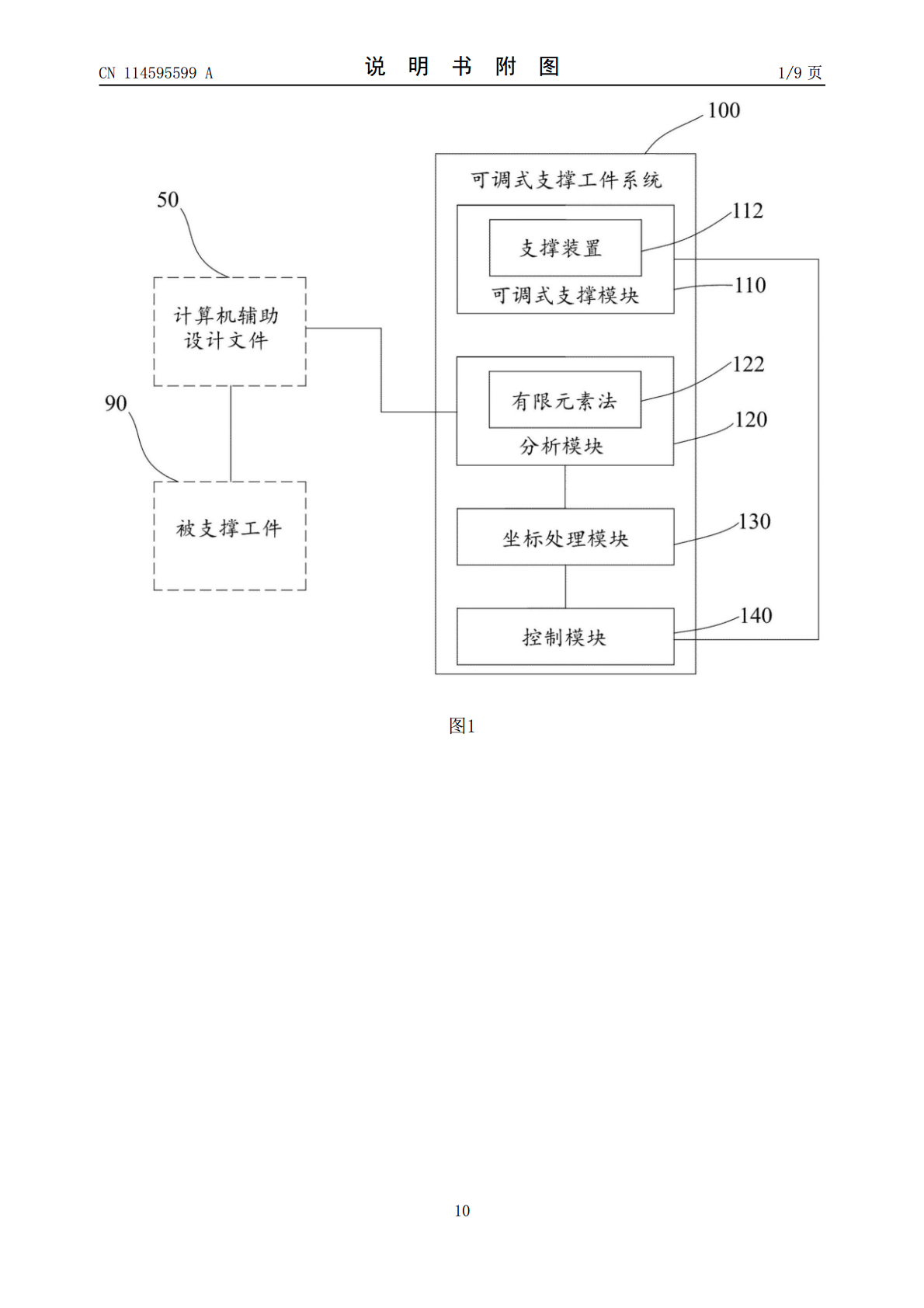
本发明公开一种调整支撑工件方法及可调式支撑工件系统,其中调整支撑工件方法包括以下步骤:设定被支撑工件的初始支撑位置信息;依据初始支撑位置信息,通过有限元素法对被支撑工件的计算机辅助设计文件进行分析以获得工件变形量信息;依据工件变形量信息以及目标工件变形量信息,求解出各支撑装置对应的支撑位置信息;依据支撑位置信息与转换程序,以获得各支撑装置的Z坐标以及法向量方向;依据支撑位置信息、Z坐标以及法向量方向,以调整各支撑装置的位置以及角度。
可调式工件支撑系统及方法.pdf
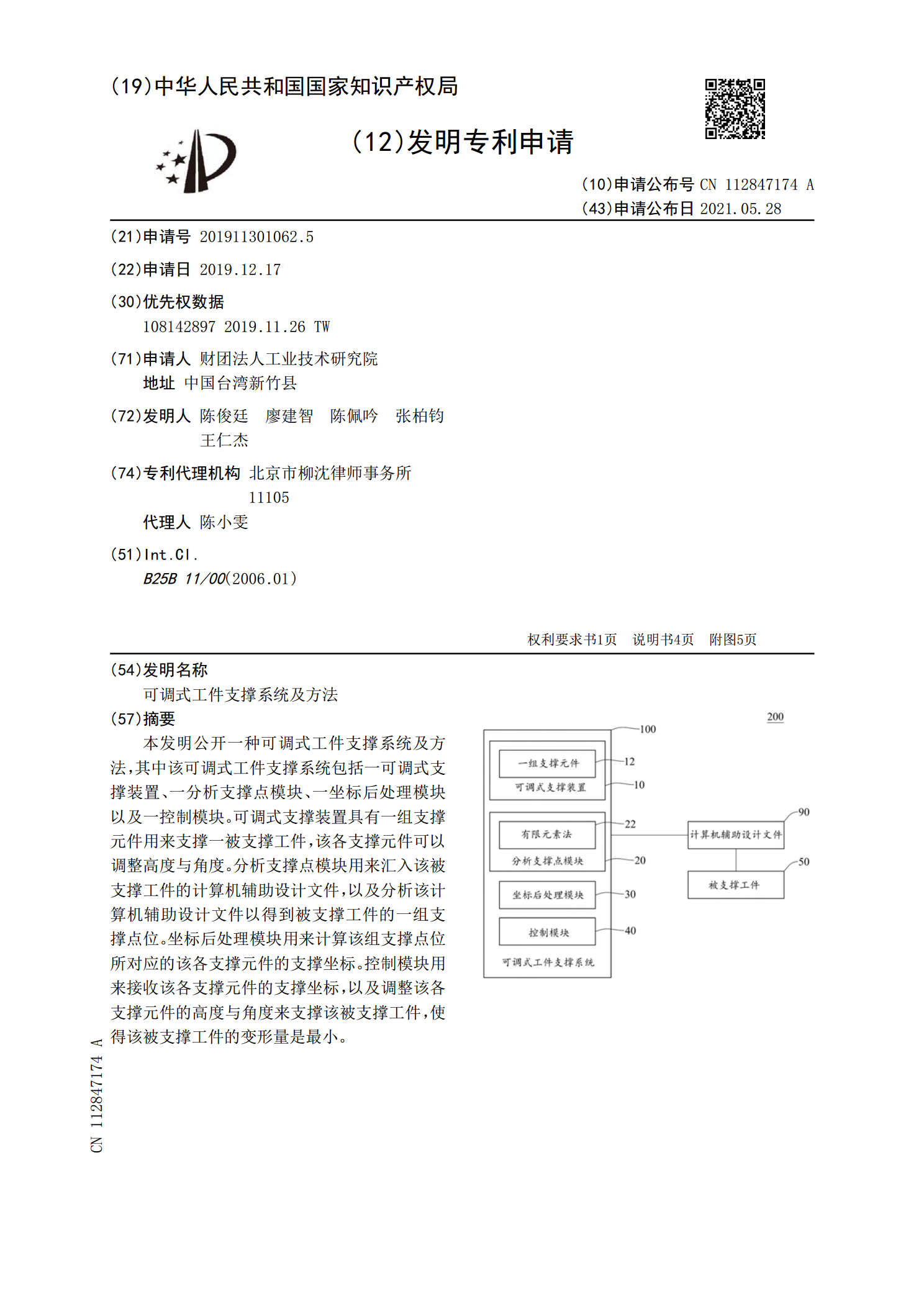
本发明公开一种可调式工件支撑系统及方法,其中该可调式工件支撑系统包括一可调式支撑装置、一分析支撑点模块、一坐标后处理模块以及一控制模块。可调式支撑装置具有一组支撑元件用来支撑一被支撑工件,该各支撑元件可以调整高度与角度。分析支撑点模块用来汇入该被支撑工件的计算机辅助设计文件,以及分析该计算机辅助设计文件以得到被支撑工件的一组支撑点位。坐标后处理模块用来计算该组支撑点位所对应的该各支撑元件的支撑坐标。控制模块用来接收该各支撑元件的支撑坐标,以及调整该各支撑元件的高度与角度来支撑该被支撑工件,使得该被支撑工件
工件支撑杆、工件支撑装置及工件支撑方法.pdf
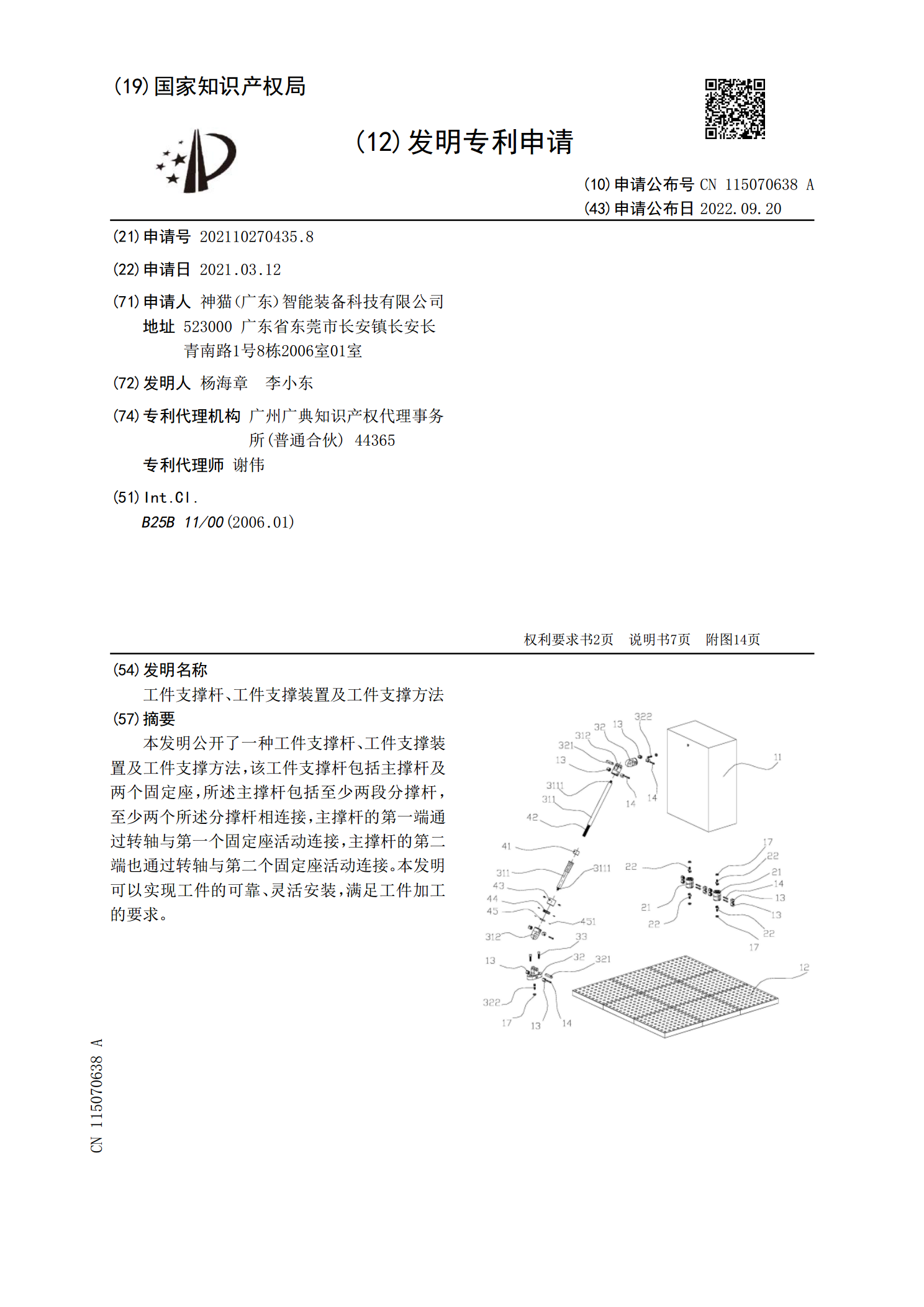
本发明公开了一种工件支撑杆、工件支撑装置及工件支撑方法,该工件支撑杆包括主撑杆及两个固定座,所述主撑杆包括至少两段分撑杆,至少两个所述分撑杆相连接,主撑杆的第一端通过转轴与第一个固定座活动连接,主撑杆的第二端也通过转轴与第二个固定座活动连接。本发明可以实现工件的可靠、灵活安装,满足工件加工的要求。
工件支撑装置及工件支撑方法.pdf
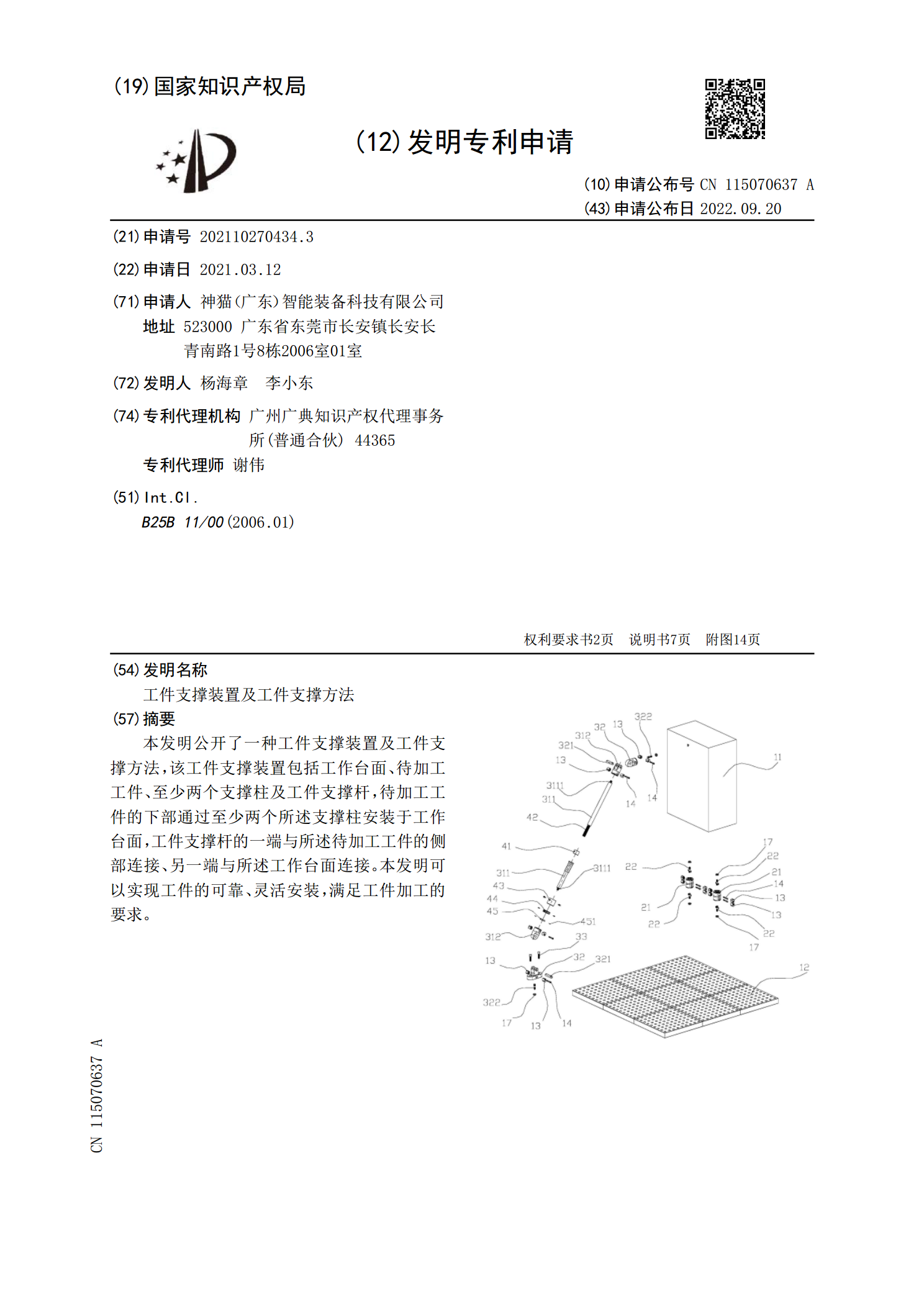
本发明公开了一种工件支撑装置及工件支撑方法,该工件支撑装置包括工作台面、待加工工件、至少两个支撑柱及工件支撑杆,待加工工件的下部通过至少两个所述支撑柱安装于工作台面,工件支撑杆的一端与所述待加工工件的侧部连接、另一端与所述工作台面连接。本发明可以实现工件的可靠、灵活安装,满足工件加工的要求。

高度可调式精锻机工件支撑.pdf
本发明涉及精锻机技术领域,是高度可调式精锻机工件支撑。它是由PLC控制器实现对工件支承的高度调节,其特征是:它至少包括托轮、工件支承、扇形齿轮、齿轮、编码器、液压缸、伺服阀和PLC控制器;工件支撑是由两条固定连接的臂构成,且两条臂间的夹角恒定,一条臂的端部固定设置有托轮,另一条臂的端部固定连接液压缸的杠杆端,液压缸的进油端设置有伺服阀;工件支撑的还与扇形齿轮联动固定,扇形齿轮与齿轮啮合,齿轮的转轴上设置有编码器;编码器与伺服阀与PLC控制器导通。本发明实现了精锻机工件支撑的高度可调,使精锻机在锻打时,避免