
一种室内多旋翼农用无人机电机效率试验平台及方法.pdf

文宣****66

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种室内多旋翼农用无人机电机效率试验平台及方法.pdf
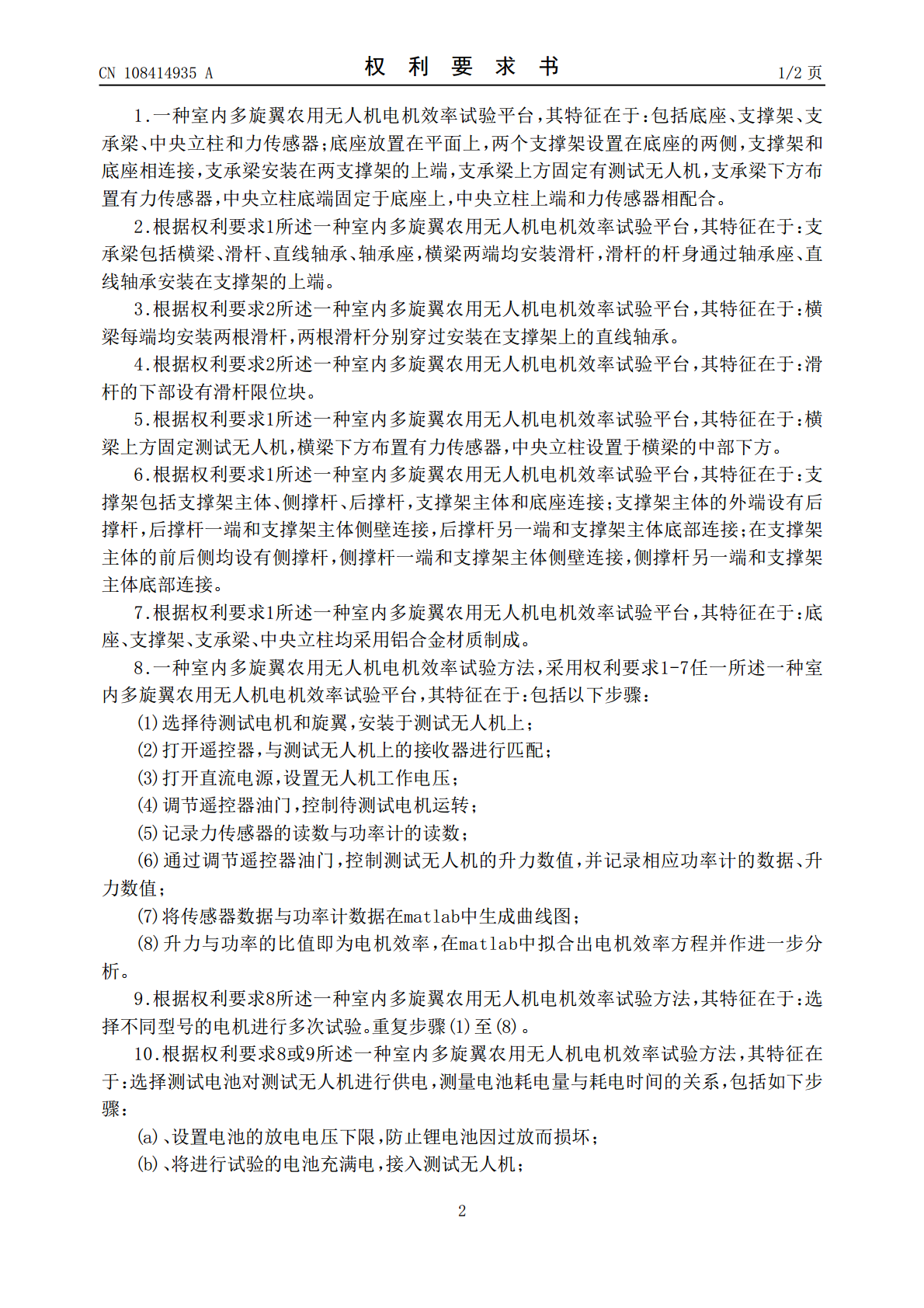
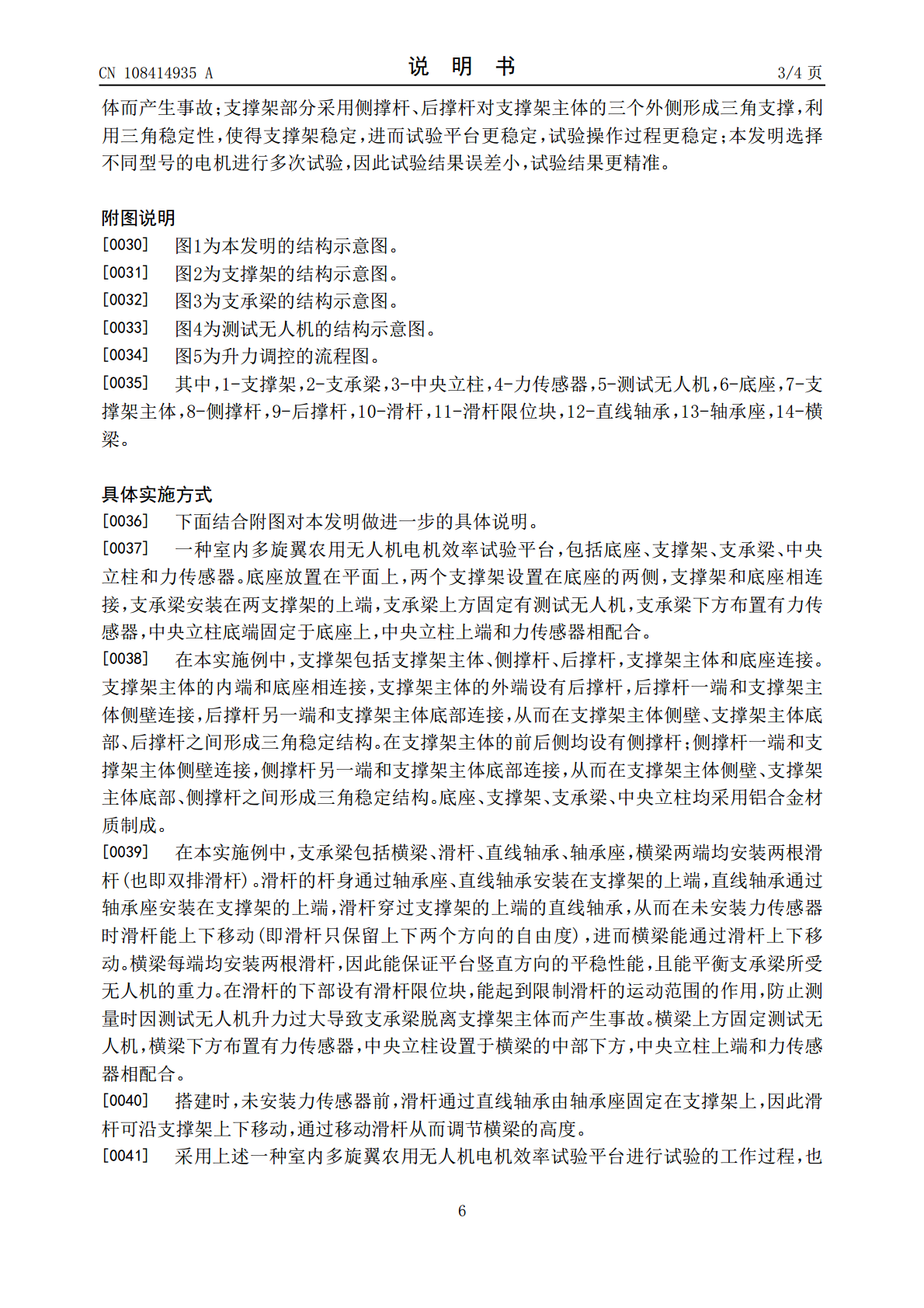
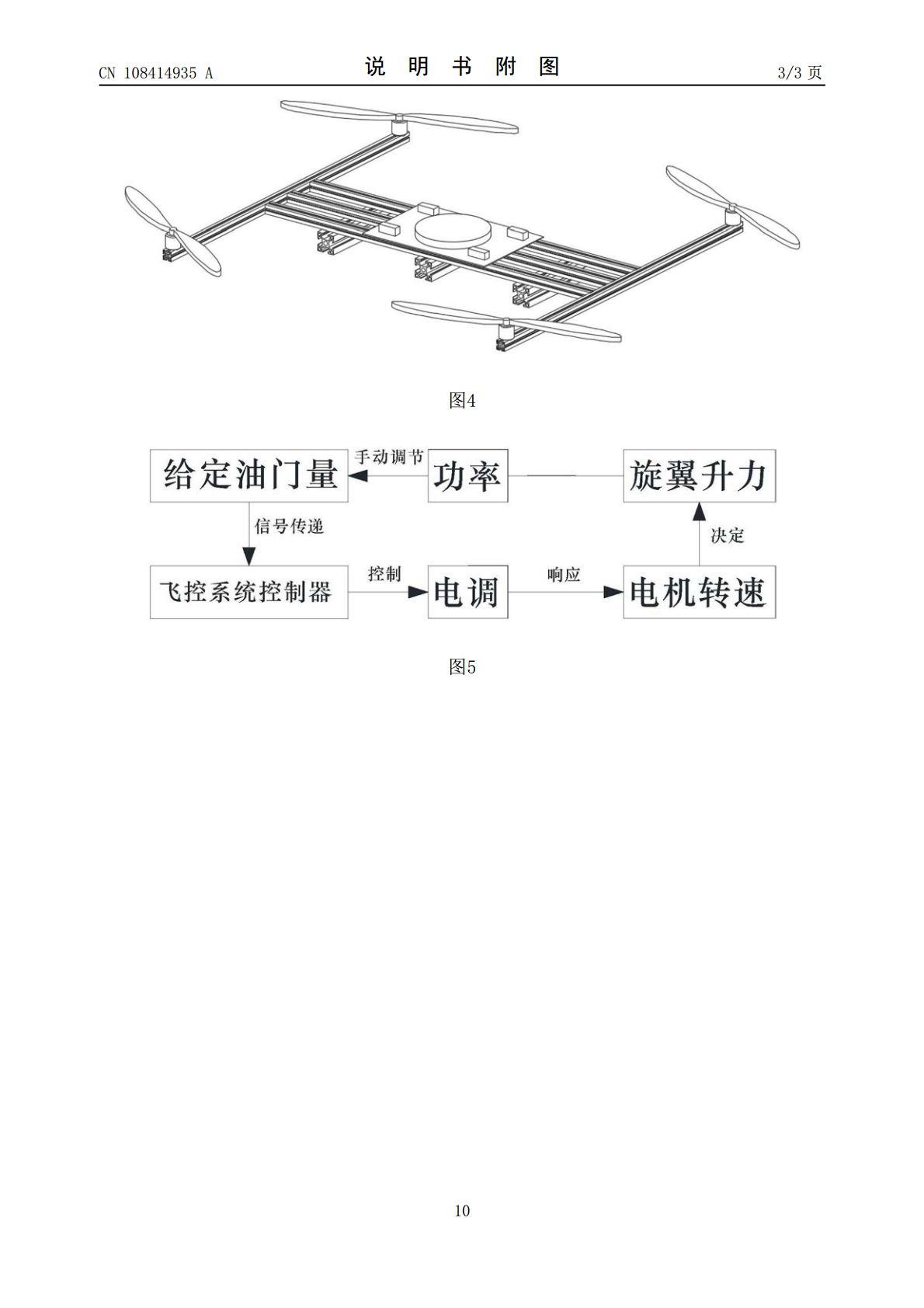
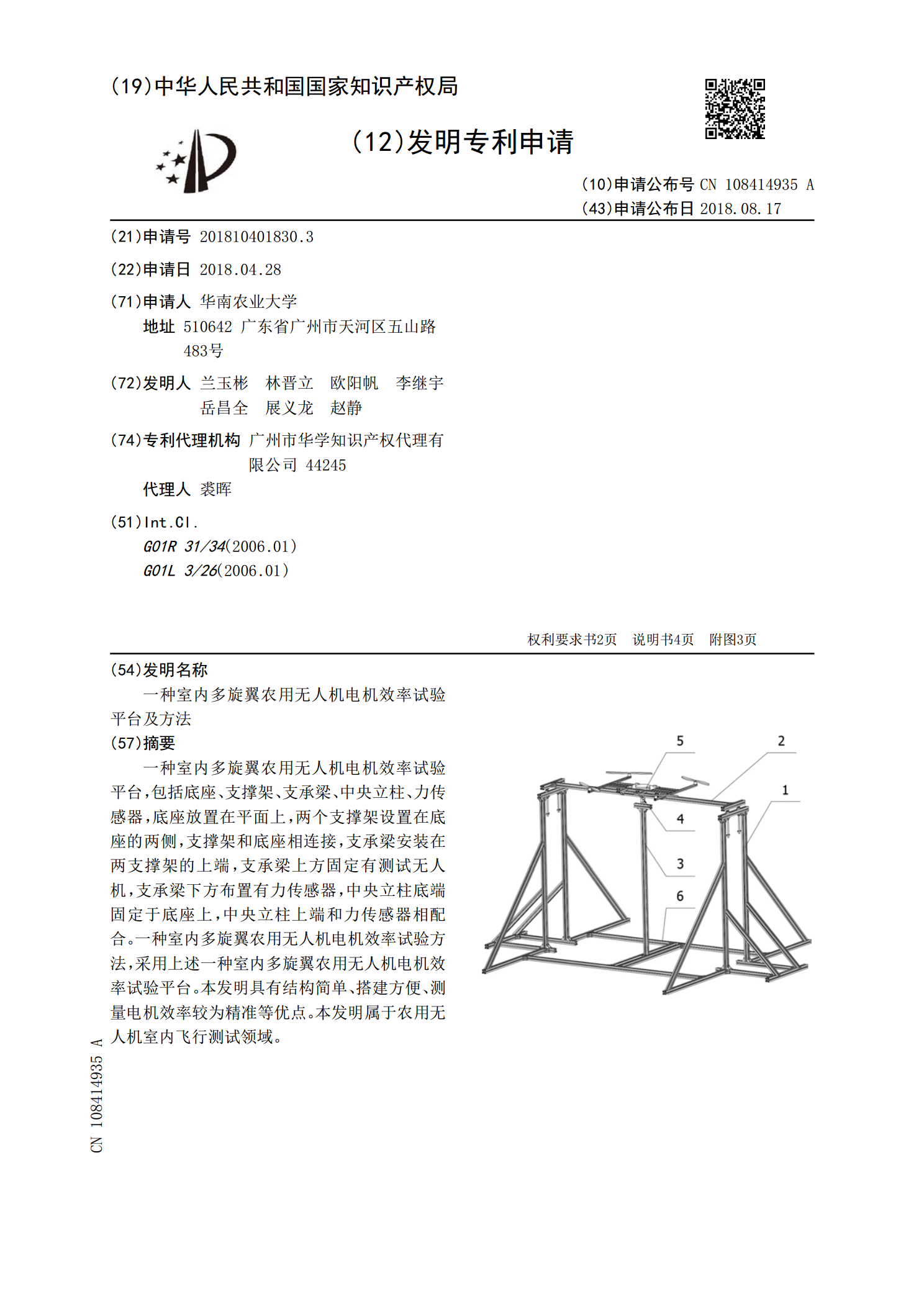
一种室内多旋翼农用无人机电机效率试验平台,包括底座、支撑架、支承梁、中央立柱、力传感器,底座放置在平面上,两个支撑架设置在底座的两侧,支撑架和底座相连接,支承梁安装在两支撑架的上端,支承梁上方固定有测试无人机,支承梁下方布置有力传感器,中央立柱底端固定于底座上,中央立柱上端和力传感器相配合。一种室内多旋翼农用无人机电机效率试验方法,采用上述一种室内多旋翼农用无人机电机效率试验平台。本发明具有结构简单、搭建方便、测量电机效率较为精准等优点。本发明属于农用无人机室内飞行测试领域。
一种农用多旋翼无人机.pdf
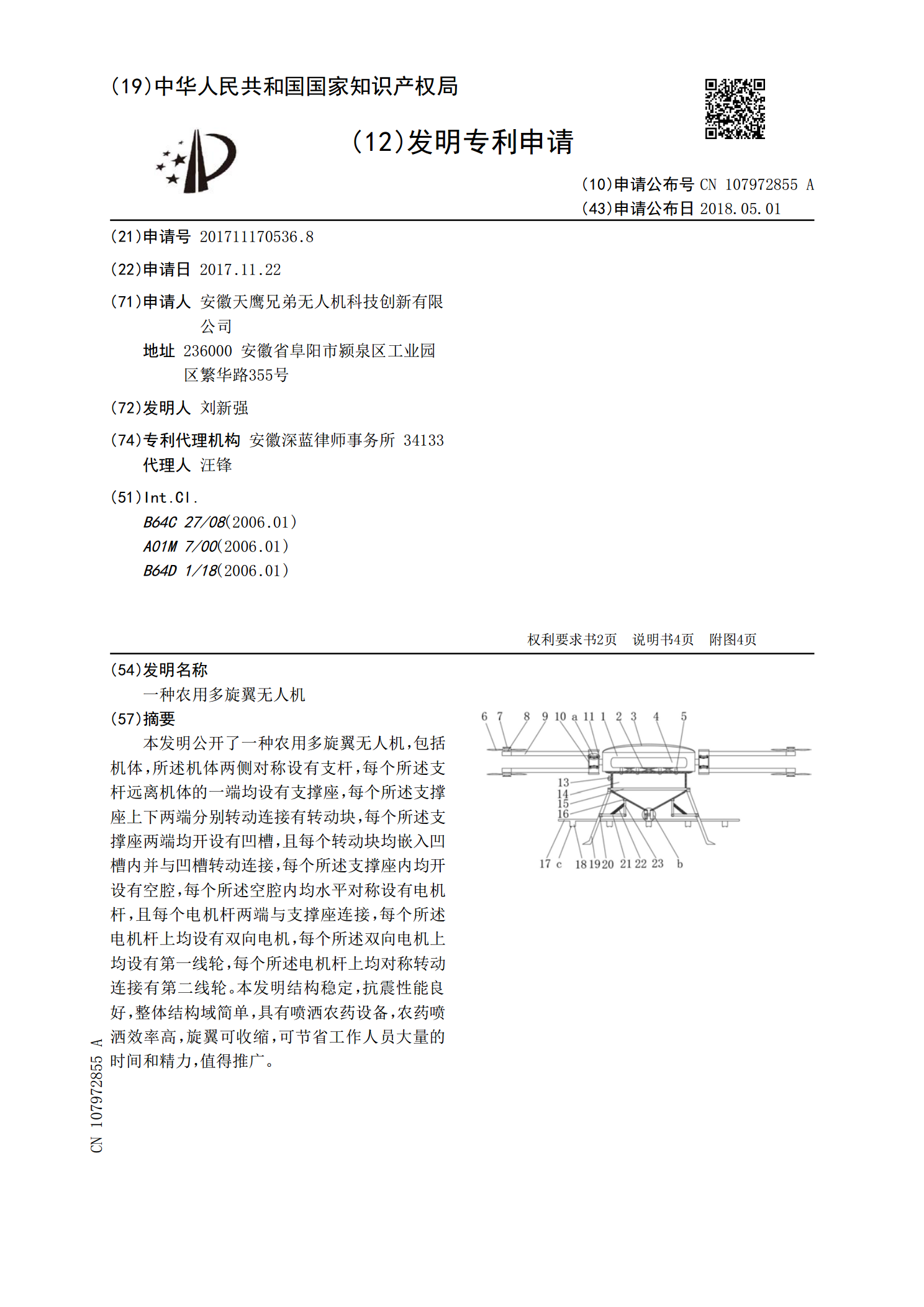
本发明公开了一种农用多旋翼无人机,包括机体,所述机体两侧对称设有支杆,每个所述支杆远离机体的一端均设有支撑座,每个所述支撑座上下两端分别转动连接有转动块,每个所述支撑座两端均开设有凹槽,且每个转动块均嵌入凹槽内并与凹槽转动连接,每个所述支撑座内均开设有空腔,每个所述空腔内均水平对称设有电机杆,且每个电机杆两端与支撑座连接,每个所述电机杆上均设有双向电机,每个所述双向电机上均设有第一线轮,每个所述电机杆上均对称转动连接有第二线轮。本发明结构稳定,抗震性能良好,整体结构域简单,具有喷洒农药设备,农药喷洒效率高
一种多旋翼无人机室内导航方法.pdf
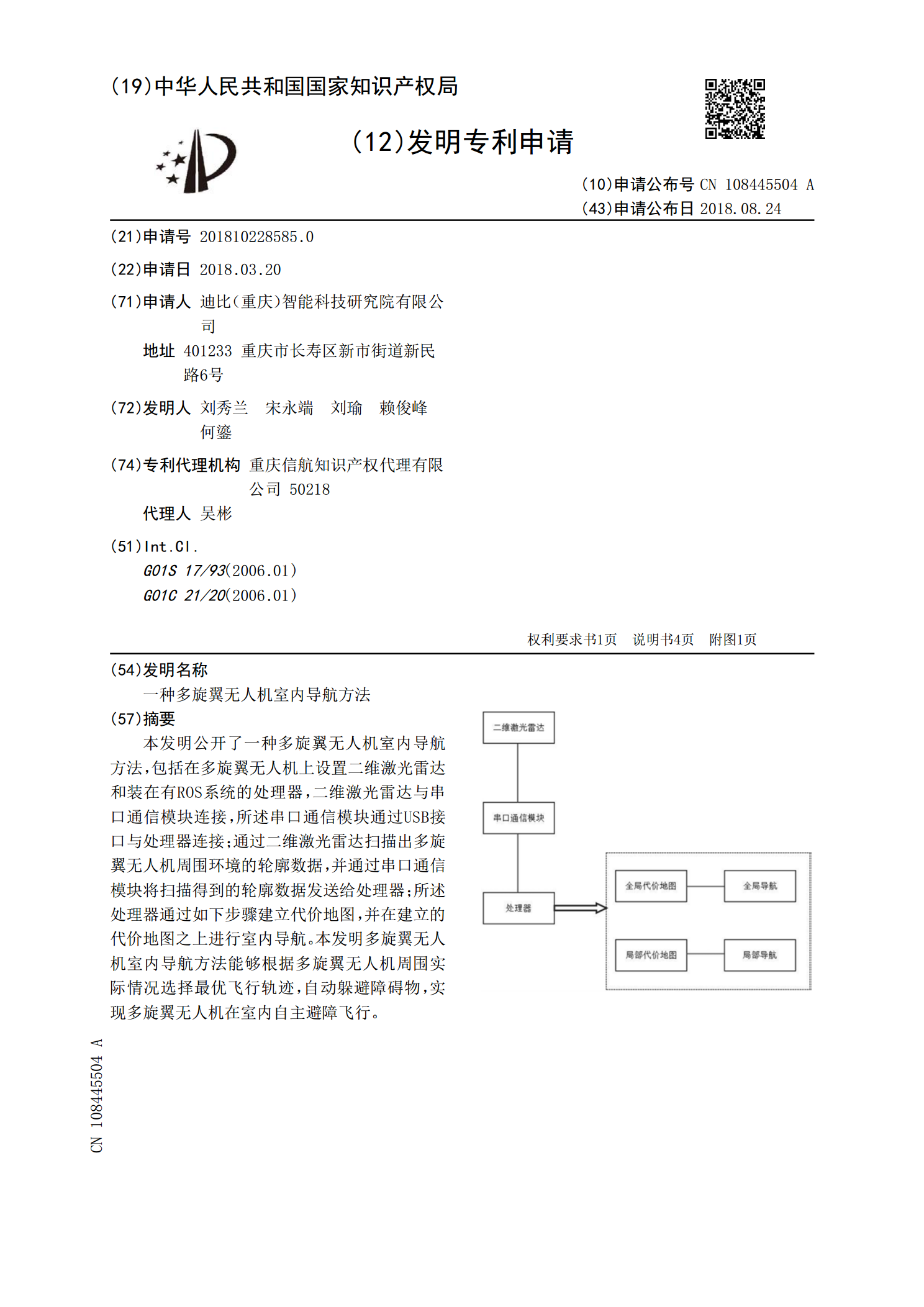
本发明公开了一种多旋翼无人机室内导航方法,包括在多旋翼无人机上设置二维激光雷达和装在有ROS系统的处理器,二维激光雷达与串口通信模块连接,所述串口通信模块通过USB接口与处理器连接;通过二维激光雷达扫描出多旋翼无人机周围环境的轮廓数据,并通过串口通信模块将扫描得到的轮廓数据发送给处理器;所述处理器通过如下步骤建立代价地图,并在建立的代价地图之上进行室内导航。本发明多旋翼无人机室内导航方法能够根据多旋翼无人机周围实际情况选择最优飞行轨迹,自动躲避障碍物,实现多旋翼无人机在室内自主避障飞行。
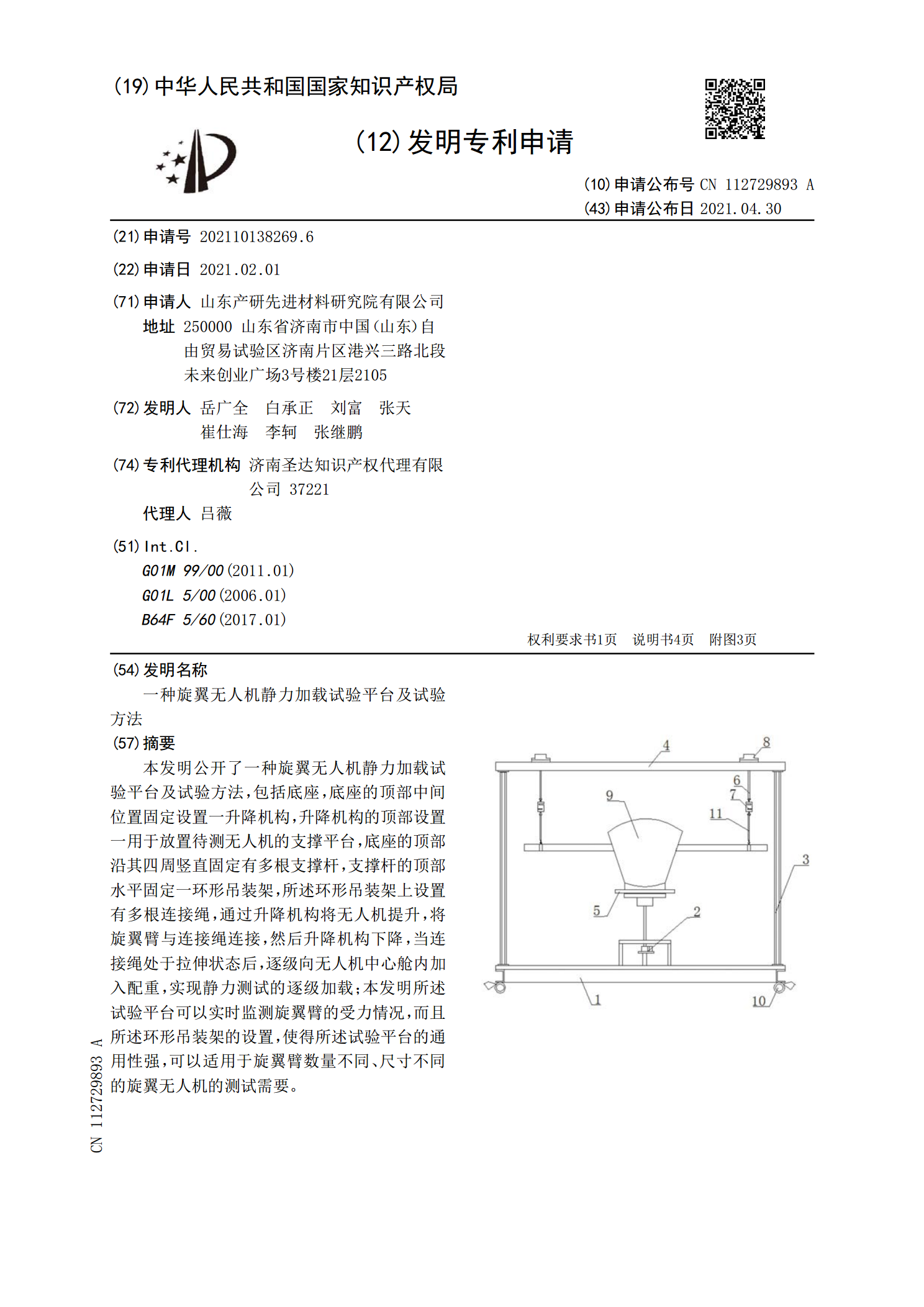
一种旋翼无人机静力加载试验平台及试验方法.pdf
本发明公开了一种旋翼无人机静力加载试验平台及试验方法,包括底座,底座的顶部中间位置固定设置一升降机构,升降机构的顶部设置一用于放置待测无人机的支撑平台,底座的顶部沿其四周竖直固定有多根支撑杆,支撑杆的顶部水平固定一环形吊装架,所述环形吊装架上设置有多根连接绳,通过升降机构将无人机提升,将旋翼臂与连接绳连接,然后升降机构下降,当连接绳处于拉伸状态后,逐级向无人机中心舱内加入配重,实现静力测试的逐级加载;本发明所述试验平台可以实时监测旋翼臂的受力情况,而且所述环形吊装架的设置,使得所述试验平台的通用性强,可以

一种多旋翼无人机及其电机装置.pdf
本实用新型公开了一种电机装置,包括用以驱动桨叶的电机,还包括与电机连接、用以防护电机的底座以及设于底座、用以显示当前运行是否正常的显示部。本实用新型还公开了一种包括上述电机装置的多旋翼无人机。上述电机装置通过模块化设计,可以使电机底座与显示部集成,以形成完整的模块,可以方便装置的维修与保养,从而可以大大降低物料成本,装配人员的人工成本,以及后续的维护成本。