
吸附力调节方法及装置.pdf

小沛****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
吸附力调节方法及装置.pdf
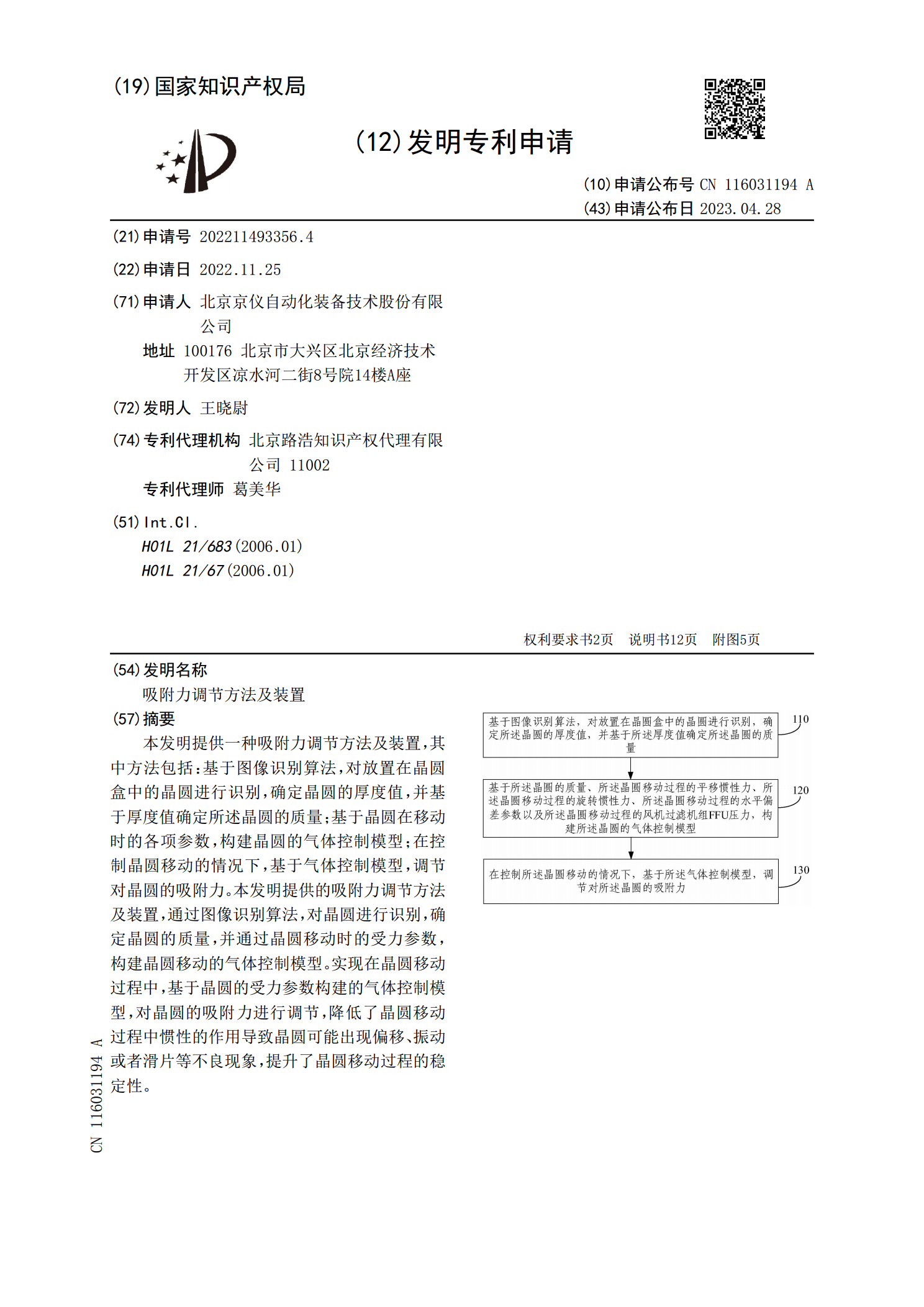
本发明提供一种吸附力调节方法及装置,其中方法包括:基于图像识别算法,对放置在晶圆盒中的晶圆进行识别,确定晶圆的厚度值,并基于厚度值确定所述晶圆的质量;基于晶圆在移动时的各项参数,构建晶圆的气体控制模型;在控制晶圆移动的情况下,基于气体控制模型,调节对晶圆的吸附力。本发明提供的吸附力调节方法及装置,通过图像识别算法,对晶圆进行识别,确定晶圆的质量,并通过晶圆移动时的受力参数,构建晶圆移动的气体控制模型。实现在晶圆移动过程中,基于晶圆的受力参数构建的气体控制模型,对晶圆的吸附力进行调节,降低了晶圆移动过程中惯

一种吸附力可调节永磁间隙吸附装置.pdf
一种吸附力可调永磁间隙吸附装置,包括磁铁调节手柄、磁铁凸轮轴、磁铁凸轮轴套、磁铁传动板、磁座、永磁铁、磁座轴承座、磁座轴;永磁铁通过磁铁传动板固定安装在磁座中,磁座通过磁座轴承座与支承底盘相连接,且可以绕磁座轴转动;磁铁调节手柄与磁铁凸轮轴相连接,转动磁铁调节手柄即可实现吸附装置与导磁工件之间磁吸附力。本发明可以安装于在磁性工件上移动机器人平台,提高移动机器人平台的静态和动态稳定性,同时,吸附力可调节使移动机器人平台的搬运更方便、省力,降低工人的劳动强度。

Halbach型永磁吸附装置吸附力计算方法研究.docx
Halbach型永磁吸附装置吸附力计算方法研究标题:Halbach型永磁吸附装置吸附力计算方法研究摘要:Halbach型永磁吸附装置是一种广泛应用于工业和科学领域的装置,其吸附力的计算方法对于优化装置设计、提高吸附效率至关重要。本文通过综合分析Halbach型永磁吸附装置的原理和结构,并结合基本磁学理论,探讨了吸附力的计算方法。同时,通过实验验证方法的准确性和可靠性,证明了该方法在实际应用中的有效性。研究结果表明,通过合理设计和优化吸附装置的磁场分布,可以有效提高吸附力,实现更高效的永磁吸附效果。关键词:
图像亮度的调节方法及调节装置、显示装置.pdf
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号CN104539935A(43)申请公布日2015.04.22(21)申请号CN201510025828.7(22)申请日2015.01.19(71)申请人北京京东方多媒体科技有限公司;京东方科技集团股份有限公司地址100015北京市朝阳区酒仙桥路10号6层1号(72)发明人于淑环;程鹏(74)专利代理机构北京天昊联合知识产权代理有限公司代理人柴亮(51)Int.CIH04N13/04;权利要求说明书说明书幅图(54)发明名称图像亮
音量调节方法及装置.pdf
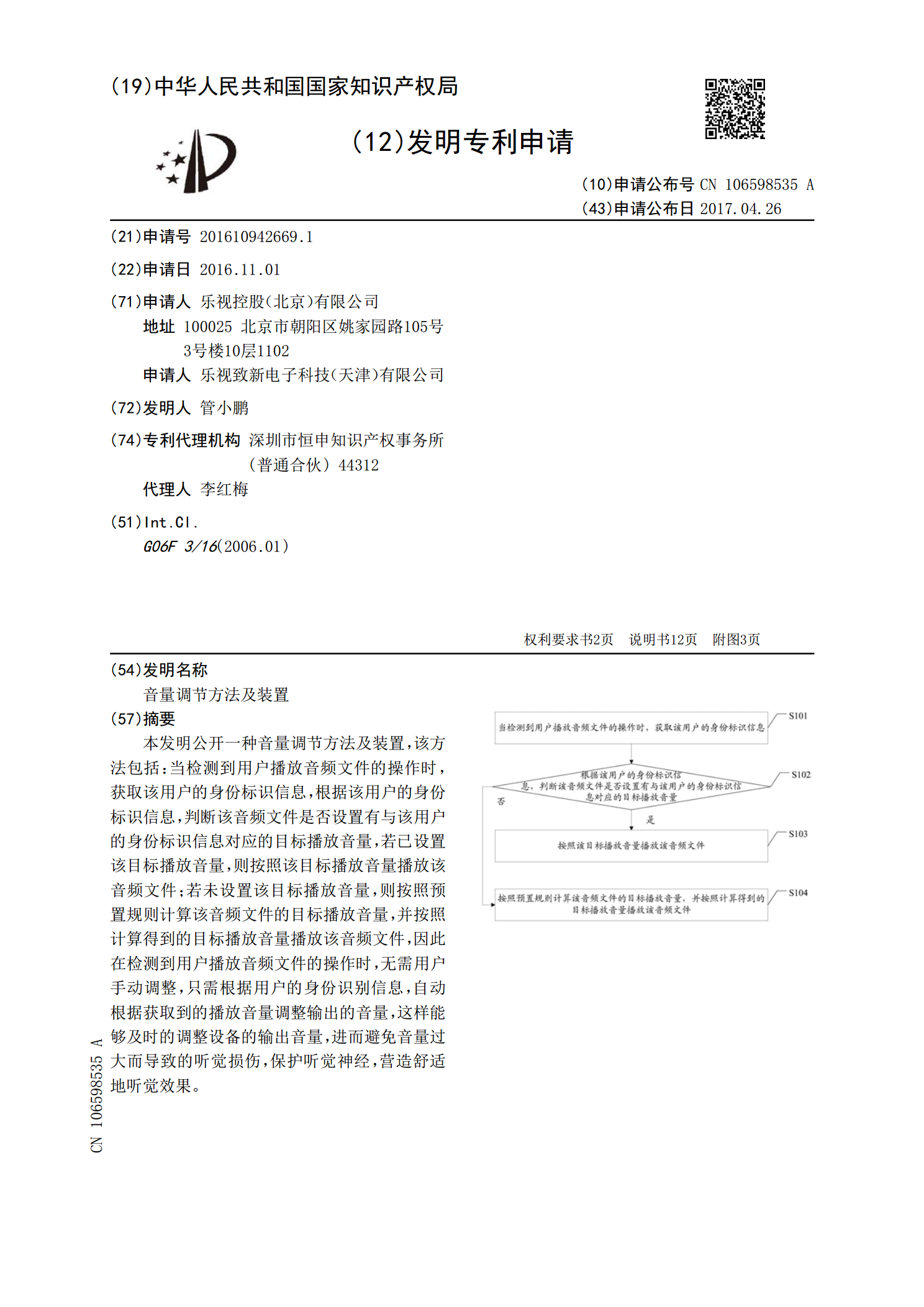
本发明公开一种音量调节方法及装置,该方法包括:当检测到用户播放音频文件的操作时,获取该用户的身份标识信息,根据该用户的身份标识信息,判断该音频文件是否设置有与该用户的身份标识信息对应的目标播放音量,若已设置该目标播放音量,则按照该目标播放音量播放该音频文件;若未设置该目标播放音量,则按照预置规则计算该音频文件的目标播放音量,并按照计算得到的目标播放音量播放该音频文件,因此在检测到用户播放音频文件的操作时,无需用户手动调整,只需根据用户的身份识别信息,自动根据获取到的播放音量调整输出的音量,这样能够及时的调