
一种自走式青饲料收获机割台仿形探测机构及其控制方法.pdf

一只****爱敏

1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自走式青饲料收获机割台仿形探测机构及其控制方法.pdf
本发明涉及自走式青饲料收获机割台仿形探测机构及其控制方法。本发明仿形轮与地面接触,将田间地面高度变化转换为角度变化,再转换为控制割台升降动作的控制信号。仿形探测机构位置靠前,仿形探测效果好,能适应大坡度变化的田间地面,有效避免割台碰到地面造成机械损坏的情况。仿形板与角度传感器间的动力传递采用齿轮传动的方式,误差小,角度变化传递及时。仿形板可进行大角度范围活动,避免因为仿形板的角度限位而使机械受损。并设置一拉簧,保证仿形板与异形齿轮脱离啮合后,异形齿轮保持在特定的位置,当仿形板受扭簧扭力恢复原位时,保证和之

一种收获机割台仿形机构.pdf
本发明公开了一种收获机割台仿形机构,所述仿形机构包括倾斜输送器(1),在所述倾斜输送器(1)的前端设置有与倾斜输送器(1)连接的过渡框架(2),在所述过渡框架(2)的内腔上部设置有与过渡框架(2)连接的横向仿形机构(3),在所述倾斜输送器(1)的两侧分别设置有纵向仿形机构(4)和油缸(5),所述纵向仿形机构(5)的两端分别与过渡框架(2)的上部和倾斜输送器(1)连接,所述油缸(5)的两端分别与过渡框架(2)的上部和倾斜输送器(1)连接。本发明具有结构紧凑、使用可靠的优点,它能够提高其仿形量,仿形准确灵活,
一种割台仿形装置及其控制系统和方法及收获机.pdf
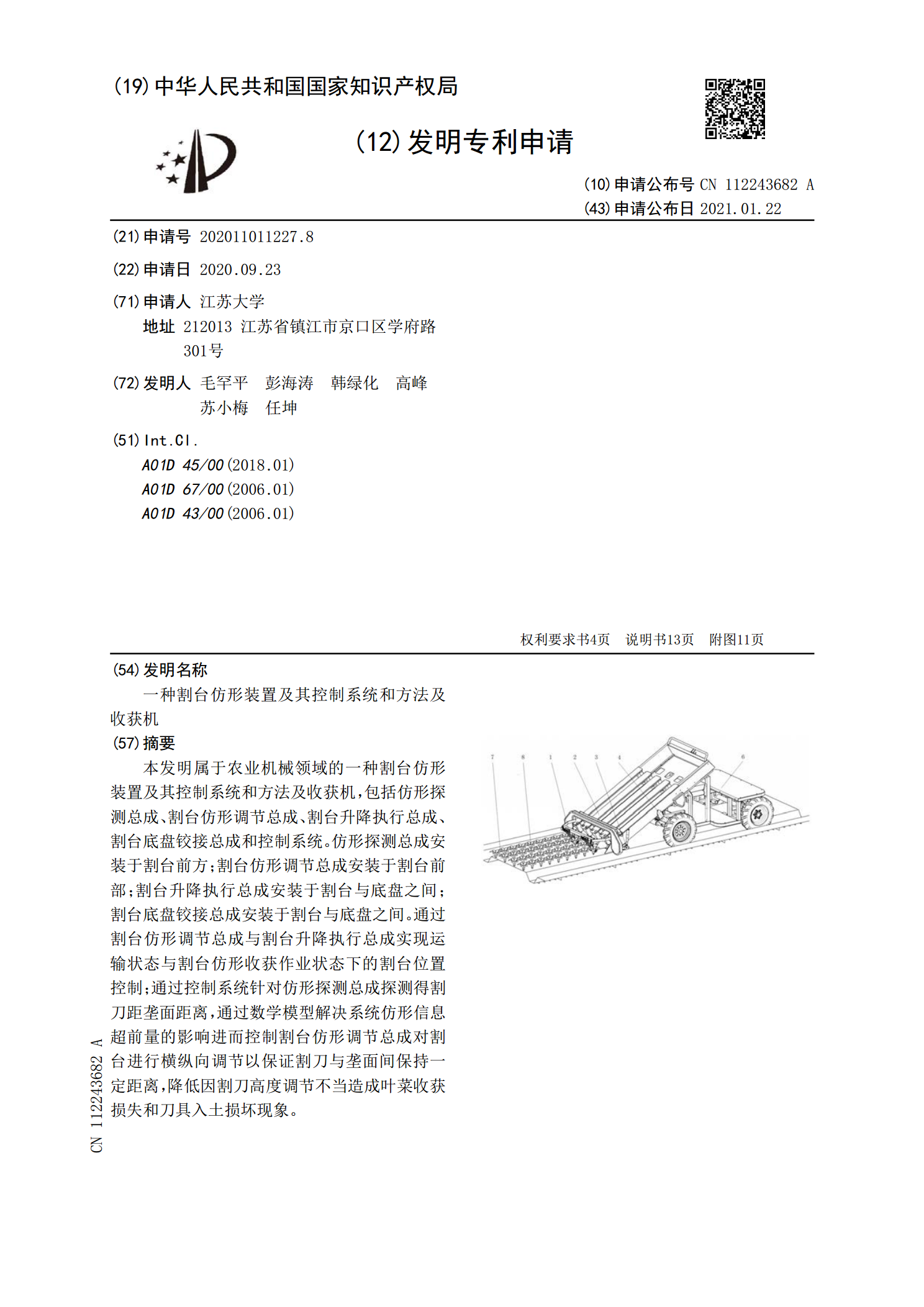
本发明属于农业机械领域的一种割台仿形装置及其控制系统和方法及收获机,包括仿形探测总成、割台仿形调节总成、割台升降执行总成、割台底盘铰接总成和控制系统。仿形探测总成安装于割台前方;割台仿形调节总成安装于割台前部;割台升降执行总成安装于割台与底盘之间;割台底盘铰接总成安装于割台与底盘之间。通过割台仿形调节总成与割台升降执行总成实现运输状态与割台仿形收获作业状态下的割台位置控制;通过控制系统针对仿形探测总成探测得割刀距垄面距离,通过数学模型解决系统仿形信息超前量的影响进而控制割台仿形调节总成对割台进行横纵向调节
甜菜收获机割台高度仿形装置及割台高度控制方法.pdf
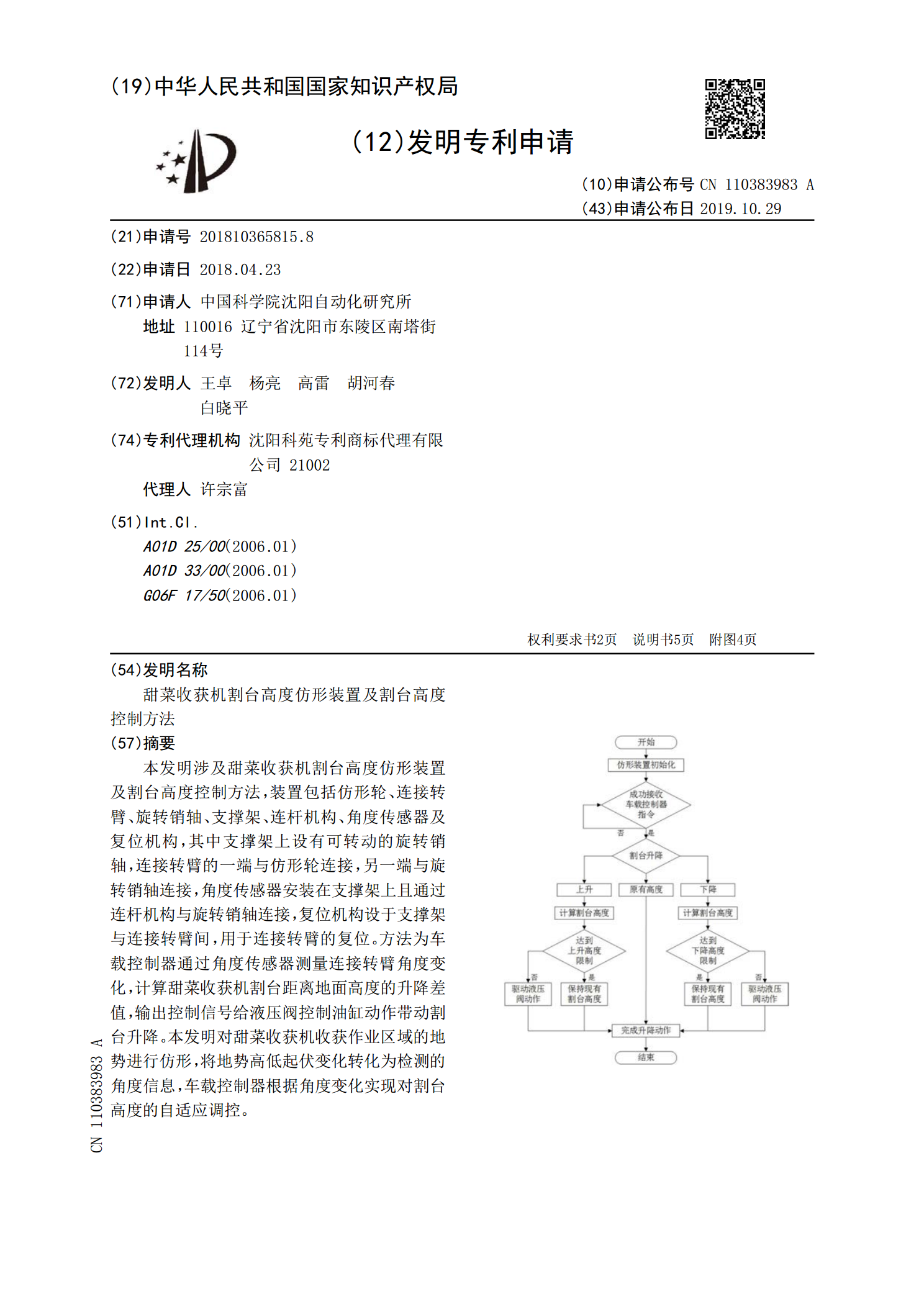
本发明涉及甜菜收获机割台高度仿形装置及割台高度控制方法,装置包括仿形轮、连接转臂、旋转销轴、支撑架、连杆机构、角度传感器及复位机构,其中支撑架上设有可转动的旋转销轴,连接转臂的一端与仿形轮连接,另一端与旋转销轴连接,角度传感器安装在支撑架上且通过连杆机构与旋转销轴连接,复位机构设于支撑架与连接转臂间,用于连接转臂的复位。方法为车载控制器通过角度传感器测量连接转臂角度变化,计算甜菜收获机割台距离地面高度的升降差值,输出控制信号给液压阀控制油缸动作带动割台升降。本发明对甜菜收获机收获作业区域的地势进行仿形,将

一种自走式青贮机仿形方法及专用仿形装置.pdf
本发明涉及一种自走式青贮机仿形方法及专用仿形装置,属于青贮饲料收获机技术领域。技术方案是:所述提升架(8)上设有悬挂装置(1)和平衡轮(6);仿形架(7)为倒U形架,上部设有左右布置的两段滑道(2),每段滑道与提升架(8)上的一个平衡轮匹配,平衡轮在滑道上滑动;提升架(8)的左右侧面与仿形架(7)的左右侧面分别通过减震装置(3)连接。本发明的有益效果是:专用仿形装置起到自适应平衡作,性能稳定,可靠,结构简单,制作成本低,能够使青贮机割台在使用过程中自适应保持水平,为青贮机能够高效快速作业提供保障,同时能保