
深度图像成像系统和方法.pdf

是雁****找我

1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
深度图像成像系统和方法.pdf
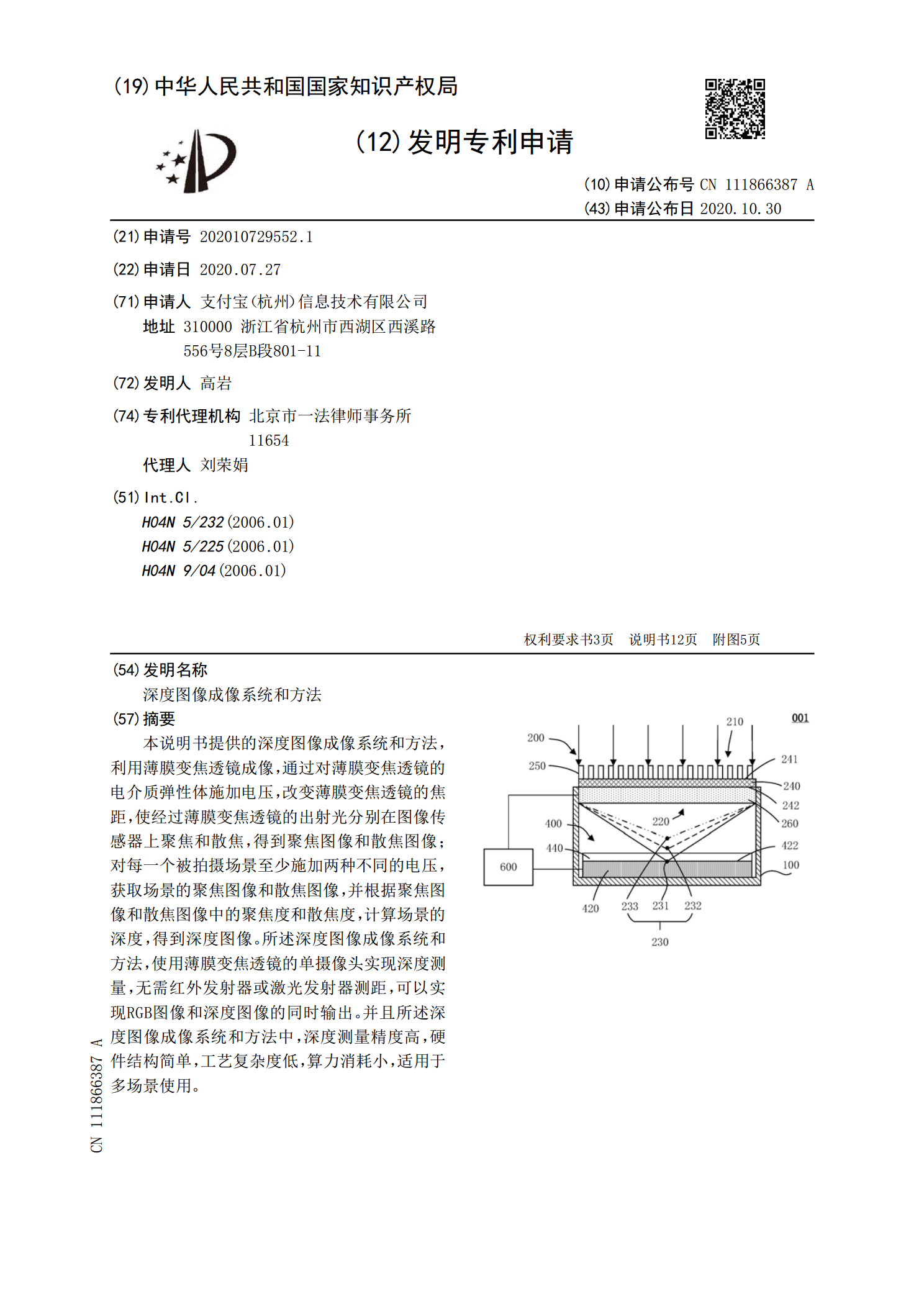
本说明书提供的深度图像成像系统和方法,利用薄膜变焦透镜成像,通过对薄膜变焦透镜的电介质弹性体施加电压,改变薄膜变焦透镜的焦距,使经过薄膜变焦透镜的出射光分别在图像传感器上聚焦和散焦,得到聚焦图像和散焦图像;对每一个被拍摄场景至少施加两种不同的电压,获取场景的聚焦图像和散焦图像,并根据聚焦图像和散焦图像中的聚焦度和散焦度,计算场景的深度,得到深度图像。所述深度图像成像系统和方法,使用薄膜变焦透镜的单摄像头实现深度测量,无需红外发射器或激光发射器测距,可以实现RGB图像和深度图像的同时输出。并且所述深度图像成
深度图像成像系统和方法.pdf
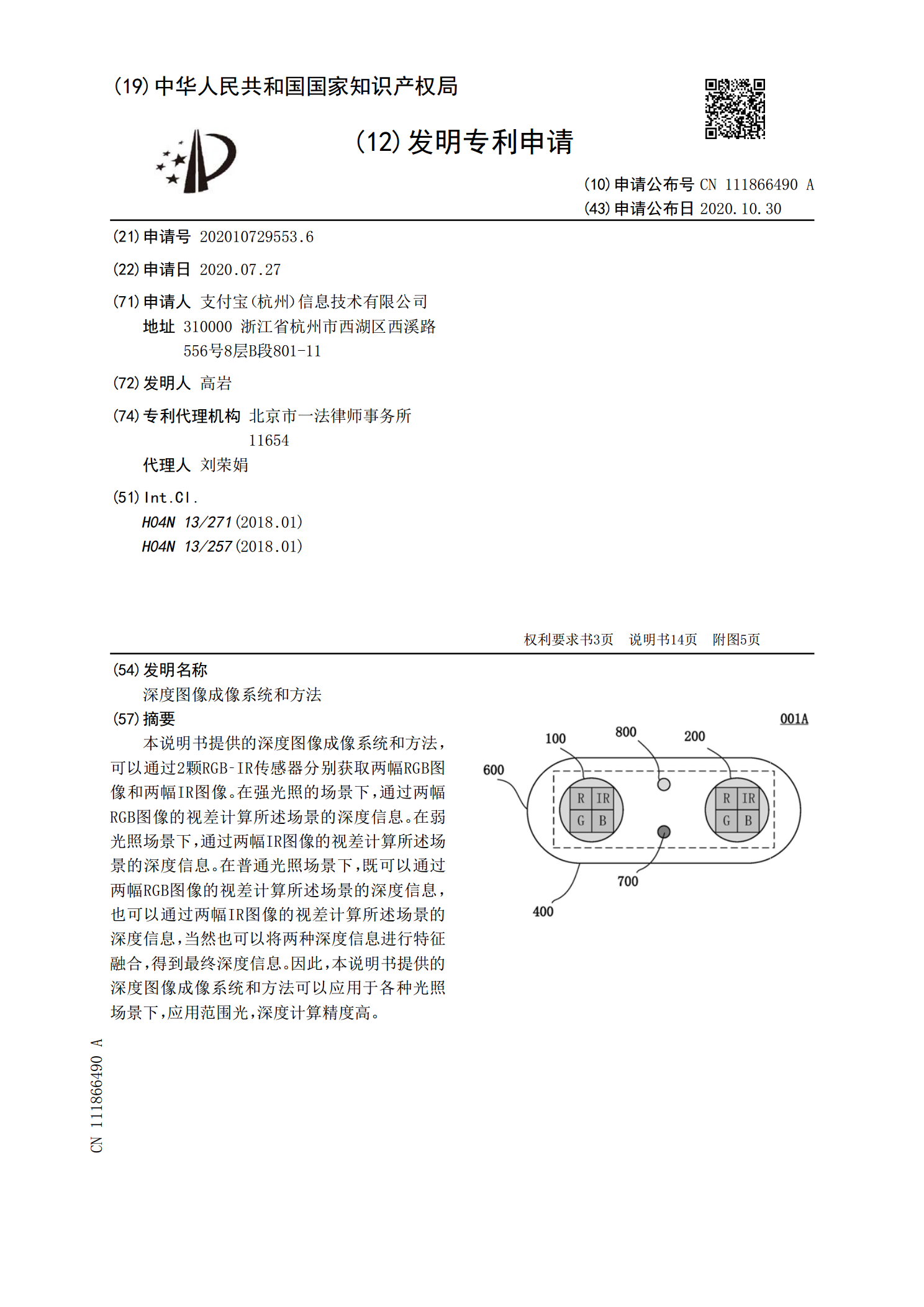
本说明书提供的深度图像成像系统和方法,可以通过2颗RGB‑IR传感器分别获取两幅RGB图像和两幅IR图像。在强光照的场景下,通过两幅RGB图像的视差计算所述场景的深度信息。在弱光照场景下,通过两幅IR图像的视差计算所述场景的深度信息。在普通光照场景下,既可以通过两幅RGB图像的视差计算所述场景的深度信息,也可以通过两幅IR图像的视差计算所述场景的深度信息,当然也可以将两种深度信息进行特征融合,得到最终深度信息。因此,本说明书提供的深度图像成像系统和方法可以应用于各种光照场景下,应用范围光,深度计算精度高。
基于深度图像的牙齿成像系统及成像方法.pdf
本发明公开了一种基于深度图像的牙齿成像系统及成像方法,涉及医学成像技术领域,本发明的系统包括红外测距模块、深度成像模块和图像处理模块,本发明的方法包括以下步骤,通过红外反射时间标定口腔中基准点与图像采集器之间的距离,得到基准点及距离数据;通过深度摄像头拍摄口腔内牙齿状态,得到深度图像;将深度图像处理为能够清晰表示牙齿轮廓的图像,并根据基准点及距离数据对图像进行归一化处理。本发明将深度图像技术运用于口腔成像可以有效观察口腔内部情况,特别是对智齿、龋病等口腔问题可以进行准确的图像展示,辅助医生对病患症状进行有
超声成像系统和超声图像分析方法.pdf
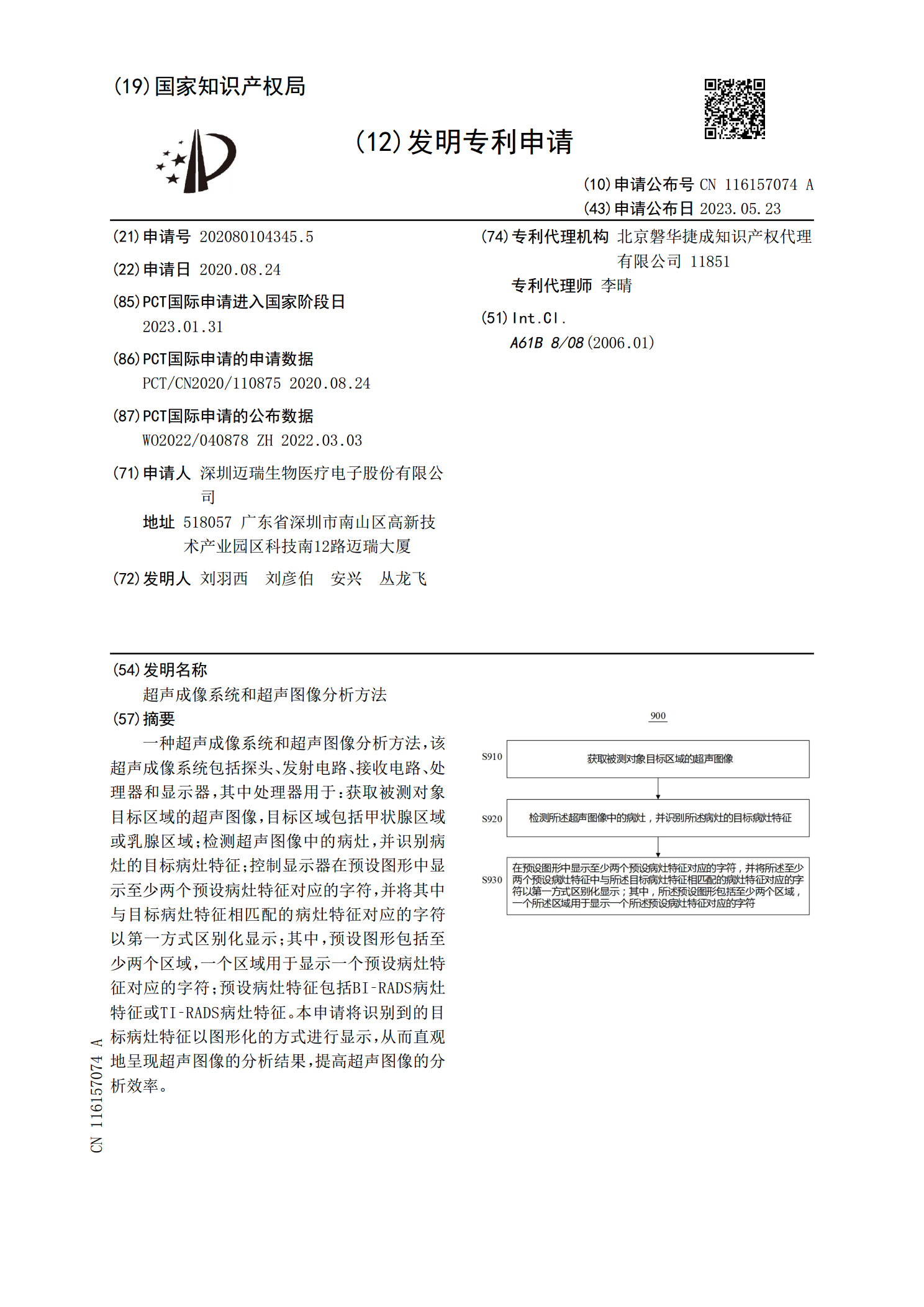
一种超声成像系统和超声图像分析方法,该超声成像系统包括探头、发射电路、接收电路、处理器和显示器,其中处理器用于:获取被测对象目标区域的超声图像,目标区域包括甲状腺区域或乳腺区域;检测超声图像中的病灶,并识别病灶的目标病灶特征;控制显示器在预设图形中显示至少两个预设病灶特征对应的字符,并将其中与目标病灶特征相匹配的病灶特征对应的字符以第一方式区别化显示;其中,预设图形包括至少两个区域,一个区域用于显示一个预设病灶特征对应的字符;预设病灶特征包括BI‑RADS病灶特征或TI‑RADS病灶特征。本申请将识别到的
超声成像系统和超声图像分析方法.pdf
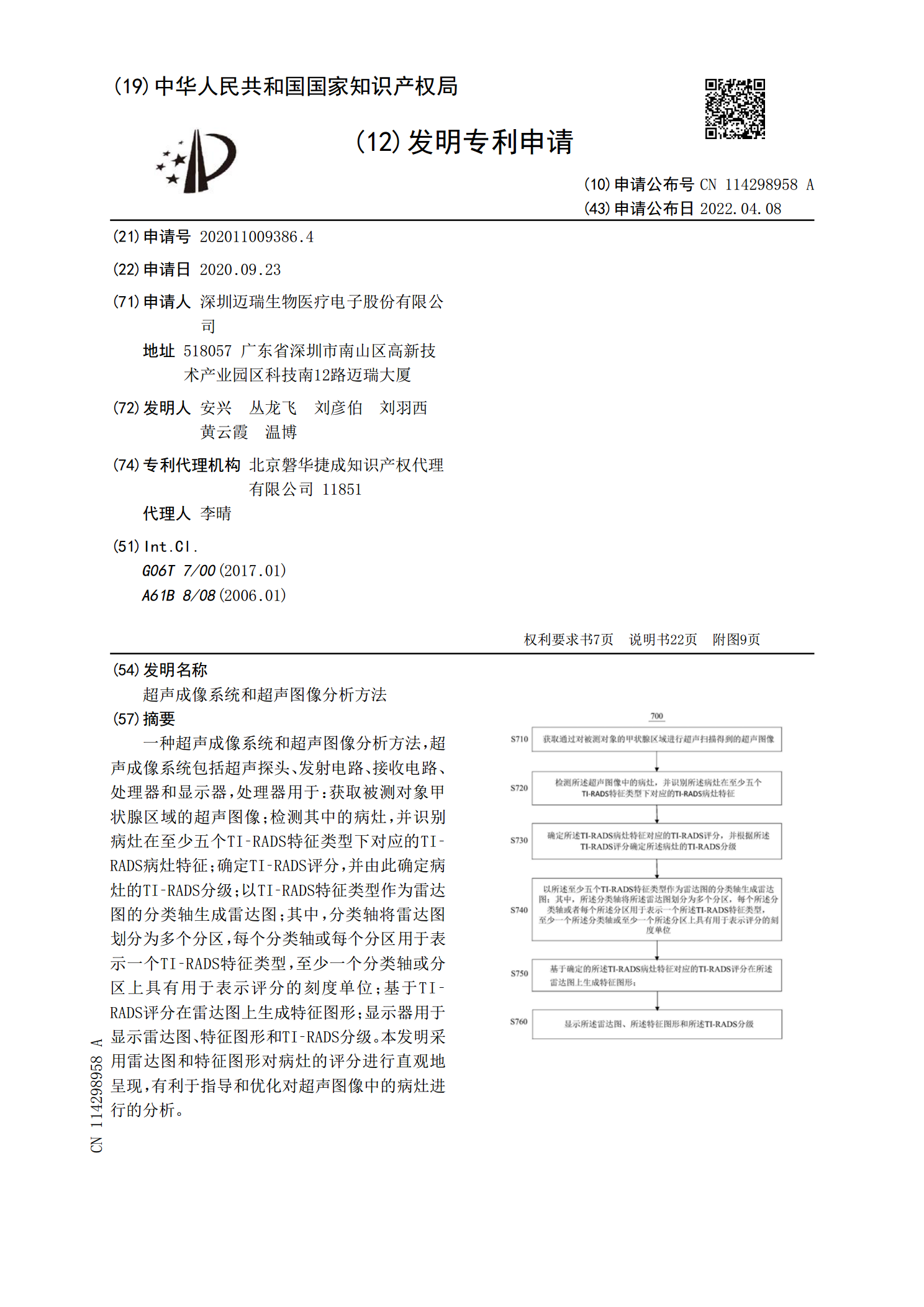
一种超声成像系统和超声图像分析方法,超声成像系统包括超声探头、发射电路、接收电路、处理器和显示器,处理器用于:获取被测对象甲状腺区域的超声图像;检测其中的病灶,并识别病灶在至少五个TI‑RADS特征类型下对应的TI‑RADS病灶特征;确定TI‑RADS评分,并由此确定病灶的TI‑RADS分级;以TI‑RADS特征类型作为雷达图的分类轴生成雷达图;其中,分类轴将雷达图划分为多个分区,每个分类轴或每个分区用于表示一个TI‑RADS特征类型,至少一个分类轴或分区上具有用于表示评分的刻度单位;基于TI‑RADS评