
基于超宽带UWB的无感入车方法和系统.pdf

Jo****63

1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于超宽带UWB的无感入车方法和系统.pdf
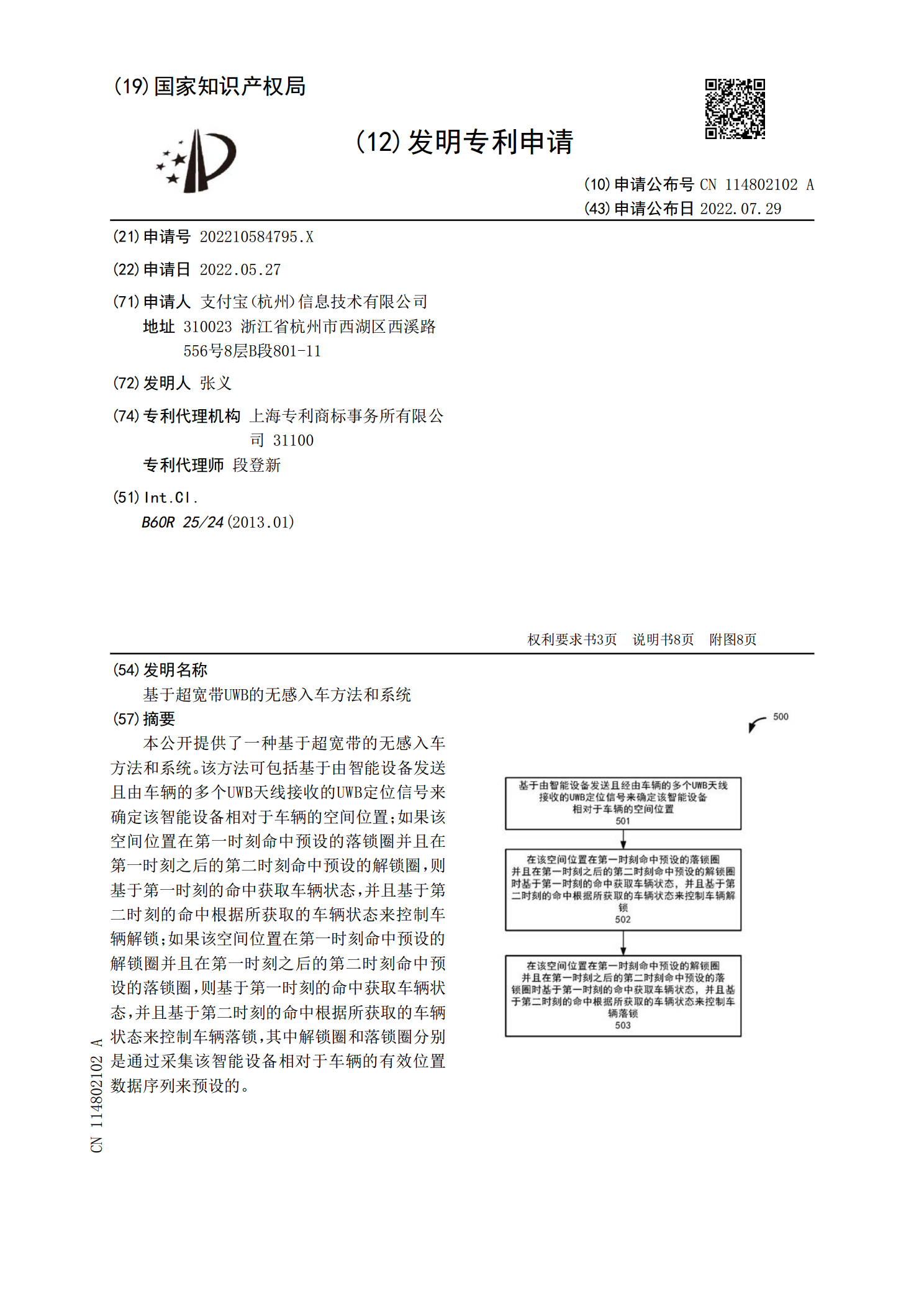
本公开提供了一种基于超宽带的无感入车方法和系统。该方法可包括基于由智能设备发送且由车辆的多个UWB天线接收的UWB定位信号来确定该智能设备相对于车辆的空间位置;如果该空间位置在第一时刻命中预设的落锁圈并且在第一时刻之后的第二时刻命中预设的解锁圈,则基于第一时刻的命中获取车辆状态,并且基于第二时刻的命中根据所获取的车辆状态来控制车辆解锁;如果该空间位置在第一时刻命中预设的解锁圈并且在第一时刻之后的第二时刻命中预设的落锁圈,则基于第一时刻的命中获取车辆状态,并且基于第二时刻的命中根据所获取的车辆状态来控制车辆
基于小程序的无感入车方法和系统.pdf
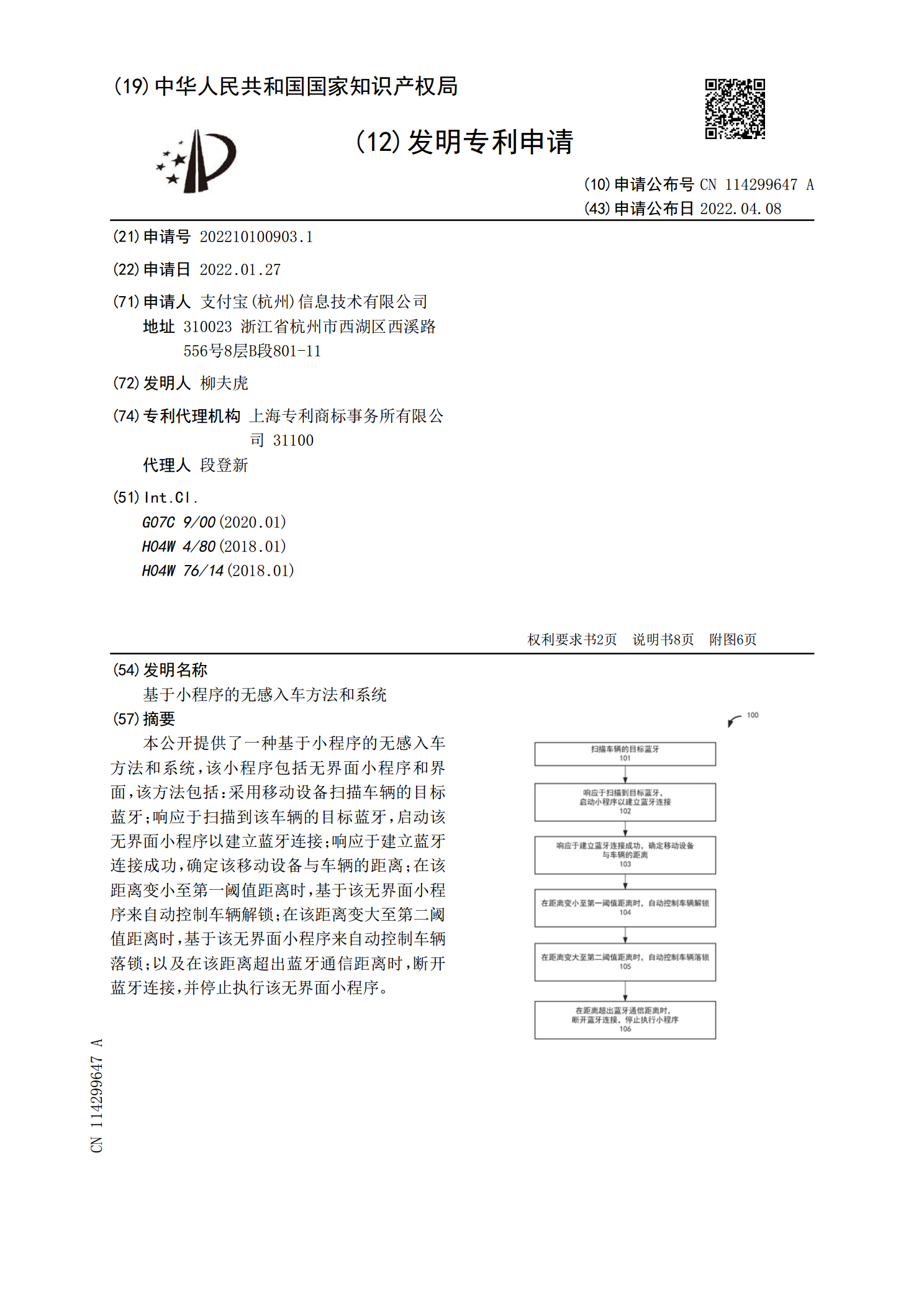
本公开提供了一种基于小程序的无感入车方法和系统,该小程序包括无界面小程序和界面,该方法包括:采用移动设备扫描车辆的目标蓝牙;响应于扫描到该车辆的目标蓝牙,启动该无界面小程序以建立蓝牙连接;响应于建立蓝牙连接成功,确定该移动设备与车辆的距离;在该距离变小至第一阈值距离时,基于该无界面小程序来自动控制车辆解锁;在该距离变大至第二阈值距离时,基于该无界面小程序来自动控制车辆落锁;以及在该距离超出蓝牙通信距离时,断开蓝牙连接,并停止执行该无界面小程序。

基于超宽带UWB的定位系统.pdf
本发明公开了一种基于超宽带UWB的定位系统,包括定位基站,用于接收定位终端发送的终端定位信号,从终端定位信号中获取终端编号,获取与终端编号对应的定位引擎,并将终端定位信号发送到定位引擎;多个定位引擎,用于接收定位基站分发的终端定位信号,并对终端定位信号处理,将与定位终端对应的位置信息发送到中间件;中间件,用于根据订阅信息,将接收到的位置信息转发到相应的计算引擎组;多个计算引擎组,其中一个计算引擎组中包括多个独立进行单业务数据运算的计算引擎单元,用于对位置信息进行围栏计算、视频区域计算、聚集/离群计算、消失
基于RFID扫描和UWB定位的无感支付方法与系统.pdf
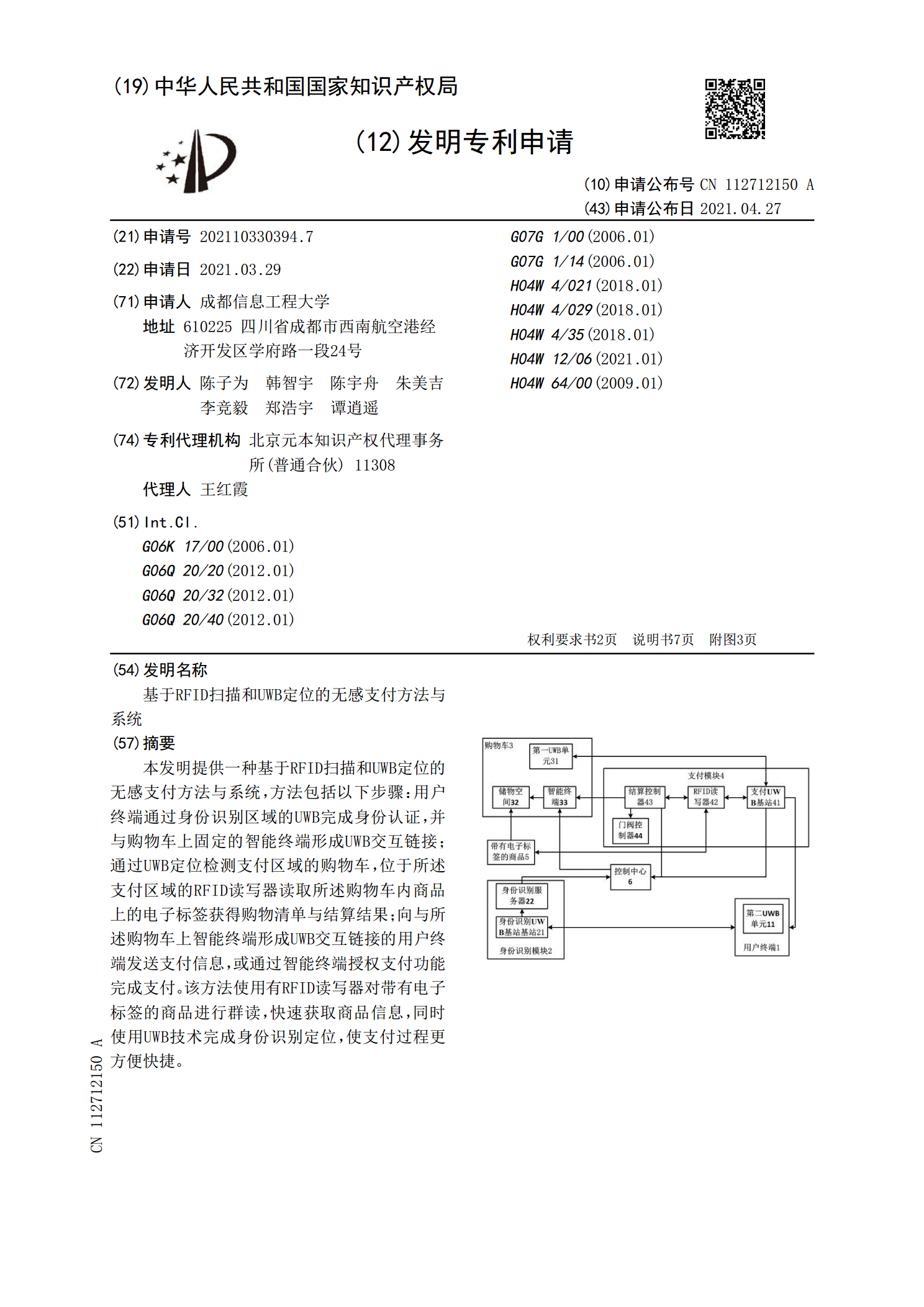
本发明提供一种基于RFID扫描和UWB定位的无感支付方法与系统,方法包括以下步骤:用户终端通过身份识别区域的UWB完成身份认证,并与购物车上固定的智能终端形成UWB交互链接;通过UWB定位检测支付区域的购物车,位于所述支付区域的RFID读写器读取所述购物车内商品上的电子标签获得购物清单与结算结果;向与所述购物车上智能终端形成UWB交互链接的用户终端发送支付信息,或通过智能终端授权支付功能完成支付。该方法使用有RFID读写器对带有电子标签的商品进行群读,快速获取商品信息,同时使用UWB技术完成身份识别定位,

基于超宽带-UWB-技术的无线定位系统的研究概要.doc
(完整word)基于超宽带_UWB_技术的无线定位系统的研究概要(完整word)基于超宽带_UWB_技术的无线定位系统的研究概要(完整word)基于超宽带_UWB_技术的无线定位系统的研究概要基于超宽带(UWB技术的无线定位系统的研究3陈学卿133高凡2马伟朕31,3桂林电子科技大学信息与通信学院,广西桂林5410042桂林航天工业高等专科学校电子工程系,广西桂林541004摘要文章介绍了超宽带定位技术的特点和优点,研究了超宽带无线用于室内定位的定位方式,并对现有的超宽带室内无线定位网络协议进行了分析,最