
一种车辆汇入智能网联车队的控制方法及系统.pdf

俊英****22


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种车辆汇入智能网联车队的控制方法及系统.pdf
本发明涉及一种车辆汇入智能网联车队的控制方法及系统,其中方法包括:获取车载传感器感知到的道路环境信息,识别汇入主车道内前后方的车辆状态;获取自车信息和交通管理信息;利用V2I技术将信息发送至路侧计算单元并存储;路侧计算单元对存储的数据进行预处理,规划车辆汇入智能网联车队的驾驶方案,得到速度引导方案,并通过I2V发送车辆;人类驾驶网联车辆的人机交互界面显示速度引导方案,提供汇入引导;智能网联车辆根据速度引导方案,基于自车的优化控制器优化控制纵向加速及制动过程,得到优化控制指令,车辆动力系统、制动系统执行优化
一种智能网联矿用车队油耗与排放协调控制方法及系统.pdf
本发明提供了一种智能网联矿用车队油耗与排放协调控制方法及系统,包括:获得矿用车队中第i辆车辆数据、环境数据;建立矿用车优化控制模型,矿用车优化控制模型的建立过程包括以车辆速度作为状态变量,结合第i辆车辆数据和环境数据构建第i辆车辆的纵向动力学系统方程;以燃油消耗量和氮氧化物排放量(NOx)为优化目标建立优化模型,获得矿用车队的优化控制问题的数学表达式,得到第i辆车辆的参考速度并进行优化;可以在加速度变化较小的情况下控制车辆运行,减少快速加速引起的燃油消耗量和NOx排放量的增加,解决了如何对油耗与氮氧化物进
一种智能网联混合动力车辆域控制系统及其控制方法.pdf
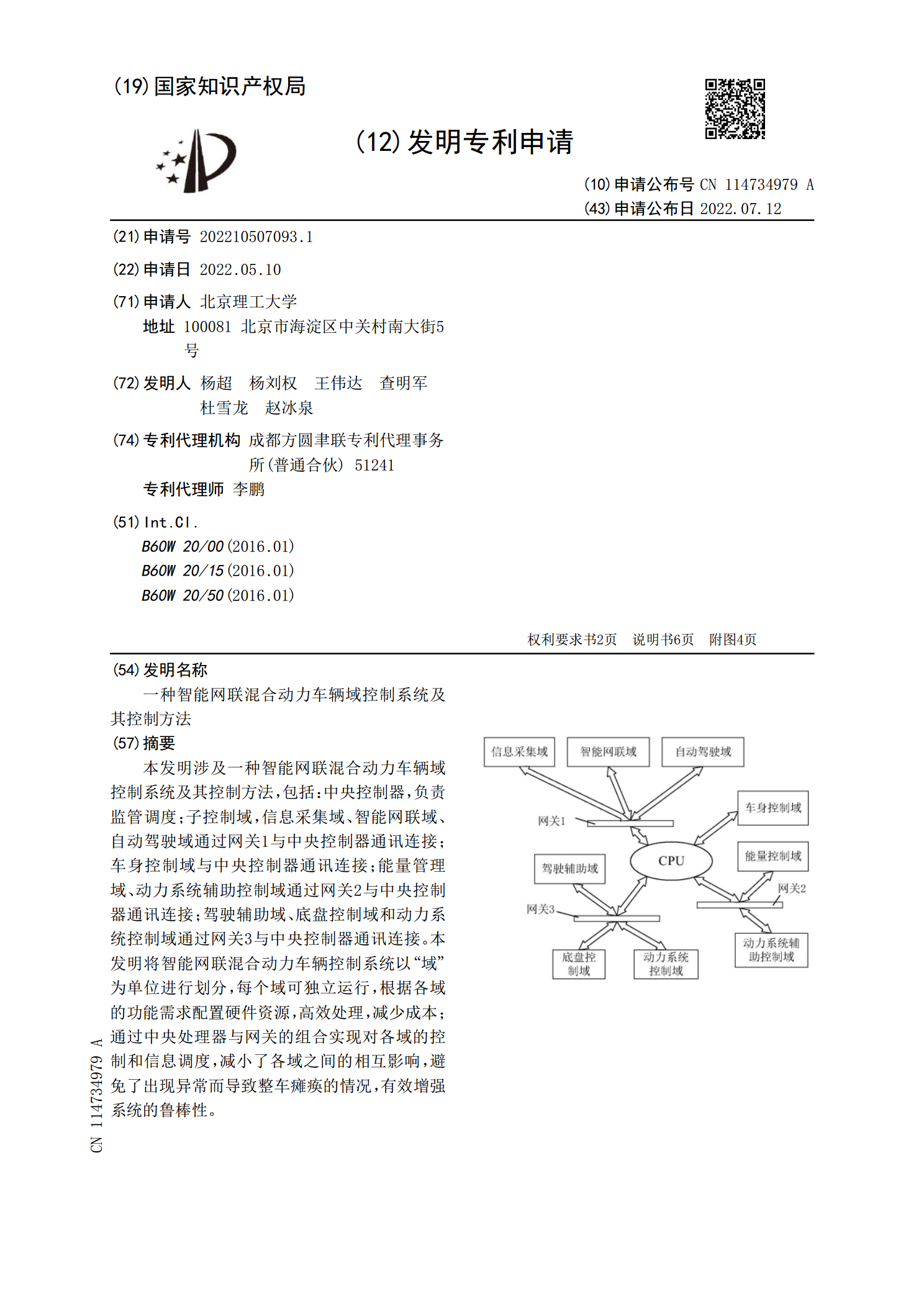
本发明涉及一种智能网联混合动力车辆域控制系统及其控制方法,包括:中央控制器,负责监管调度;子控制域,信息采集域、智能网联域、自动驾驶域通过网关1与中央控制器通讯连接;车身控制域与中央控制器通讯连接;能量管理域、动力系统辅助控制域通过网关2与中央控制器通讯连接;驾驶辅助域、底盘控制域和动力系统控制域通过网关3与中央控制器通讯连接。本发明将智能网联混合动力车辆控制系统以“域”为单位进行划分,每个域可独立运行,根据各域的功能需求配置硬件资源,高效处理,减少成本;通过中央处理器与网关的组合实现对各域的控制和信息调

一种基于智能网联技术的车辆应急警示控制方法及装置.pdf
本发明提供了一种基于智能网联技术的车辆应急警示控制方法及装置,当车辆事故发生时,通过接收用户操作或目标车辆自动生成的启动信号,从而获取目标车辆附近的环境数据,按照预设的三角警示牌放置原则,计算获得不同的环境所对应的不同的移动距离,并将获得的移动距离生成控制信息,发送给随车式应急警示移动端,从而使得随车式应急警示移动端进行移动。本发明通过对移动距离的计算,能够很好的应对不同的环境,生成对应的警示距离,从而避免由于人工放置应急警示牌所产生的误差,同时避免人工放置应急警示牌过程中存在的安全隐患,提高了车辆应急警

一种抗通信间歇的智能网联电动汽车队列鲁棒控制方法.pdf
一种抗通信间歇的智能网联电动汽车队列鲁棒控制方法,涉及汽车智能安全与自动驾驶。通过车载传感器及V2X无线通信网络来分别实时采集自车以及前车和领航车辆的行驶运动状态信息;设计单个车辆的动力学模型,结合上述信息建立具有参数不确定性的车辆编队纵向控制系统;建立智能电动车编队控制的目标函数,并给出队列控制应满足的性能指标;设计抗通信间歇的车辆编队的鲁棒H