
基于BP神经网络的救援机械臂的逆运动学求解.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于BP神经网络的救援机械臂的逆运动学求解.docx
基于BP神经网络的救援机械臂的逆运动学求解基于BP神经网络的救援机械臂逆运动学求解摘要:救援机械臂是一种重要的救援设备,它在各种复杂环境下执行任务,为人们提供生命安全保障。逆运动学是救援机械臂运动控制中的关键问题之一,其主要任务是根据目标位置确定各关节的角度,从而实现所需的动作。为了解决逆运动学求解问题,本文提出了一种基于BP神经网络的方法,并对其进行了模拟实验与性能分析。实验结果表明,基于BP神经网络的逆运动学求解方法具有较高的精确度和鲁棒性,能够有效应对各种复杂情况下的求解需求。1.引言救援机械臂是应
基于神经网络和构型编码的机械臂逆运动学求解方法.pdf
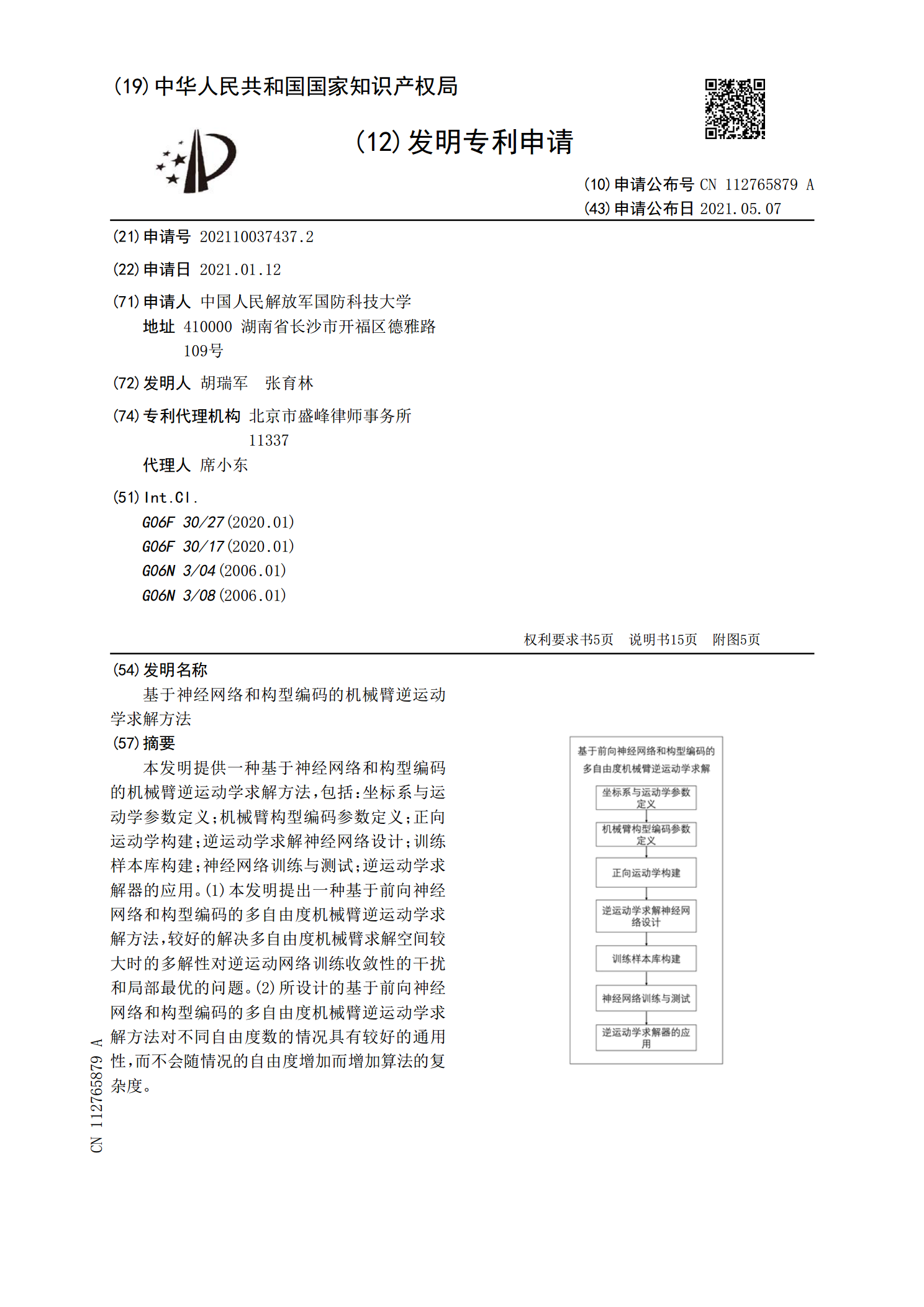
本发明提供一种基于神经网络和构型编码的机械臂逆运动学求解方法,包括:坐标系与运动学参数定义;机械臂构型编码参数定义;正向运动学构建;逆运动学求解神经网络设计;训练样本库构建;神经网络训练与测试;逆运动学求解器的应用。(1)本发明提出一种基于前向神经网络和构型编码的多自由度机械臂逆运动学求解方法,较好的解决多自由度机械臂求解空间较大时的多解性对逆运动网络训练收敛性的干扰和局部最优的问题。(2)所设计的基于前向神经网络和构型编码的多自由度机械臂逆运动学求解方法对不同自由度数的情况具有较好的通用性,而不会随情况

基于PSO优化BP神经网络的逆运动学求解研究.docx
基于PSO优化BP神经网络的逆运动学求解研究基于PSO优化BP神经网络的逆运动学求解研究摘要:逆运动学问题是机械臂控制中的重要问题之一。传统的逆运动学求解方法通常基于数学推导或迭代优化算法,但在面对复杂的机械臂结构和工作空间约束时,这些方法常常受到局部最优解和计算效率低的限制。为了克服这些问题,本文提出了一种基于粒子群优化(PSO)算法优化BP神经网络的逆运动学求解方法。实验结果表明,该方法可以有效地提高逆运动学求解的精度和速度,有效应对了复杂的机械臂逆运动学求解问题。关键词:逆运动学,BP神经网络,粒子
基于BP神经网络逆运动学的建筑机械臂控制方法和系统.pdf
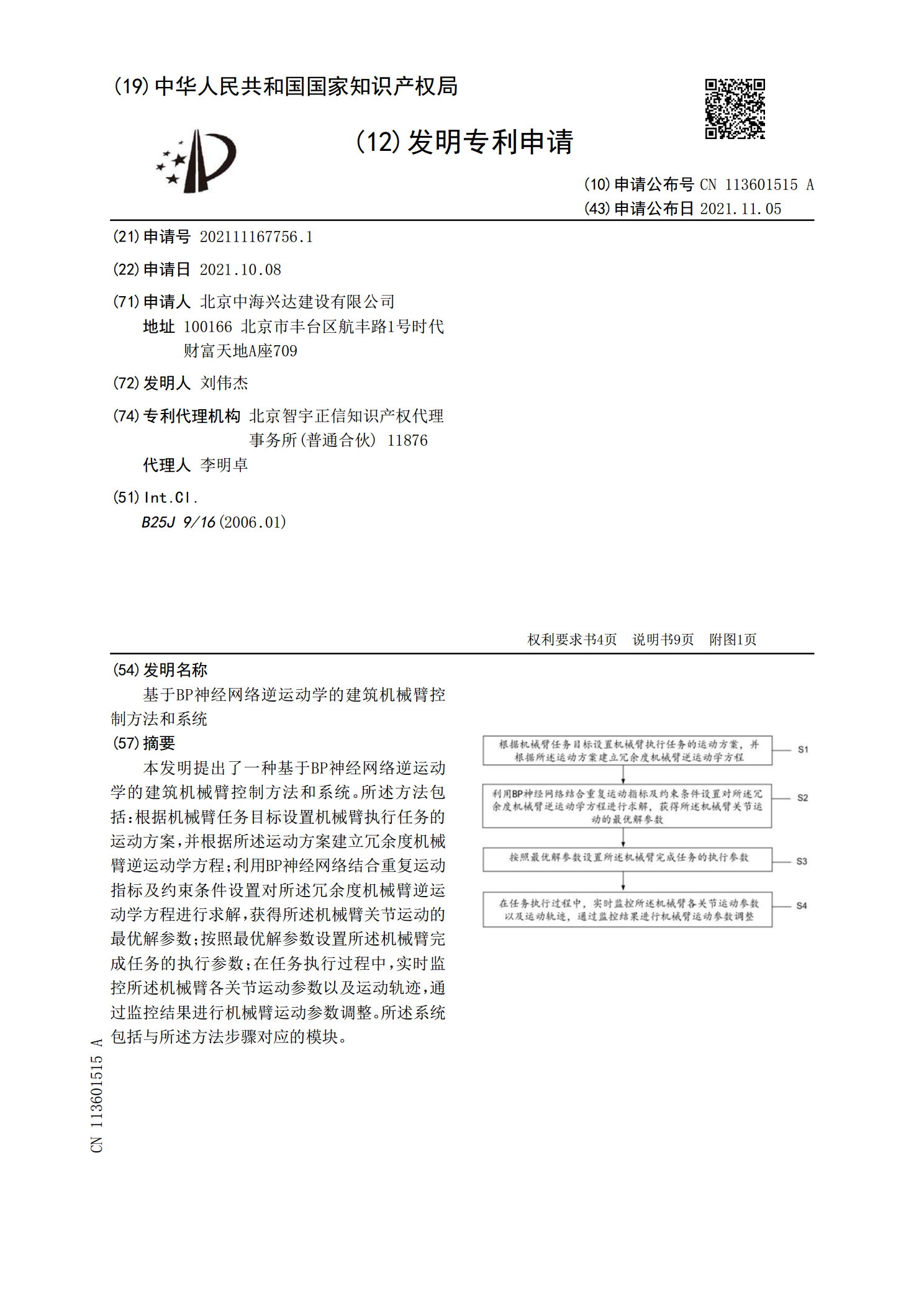
本发明提出了一种基于BP神经网络逆运动学的建筑机械臂控制方法和系统。所述方法包括:根据机械臂任务目标设置机械臂执行任务的运动方案,并根据所述运动方案建立冗余度机械臂逆运动学方程;利用BP神经网络结合重复运动指标及约束条件设置对所述冗余度机械臂逆运动学方程进行求解,获得所述机械臂关节运动的最优解参数;按照最优解参数设置所述机械臂完成任务的执行参数;在任务执行过程中,实时监控所述机械臂各关节运动参数以及运动轨迹,通过监控结果进行机械臂运动参数调整。所述系统包括与所述方法步骤对应的模块。

基于RBF神经网络的机械手逆运动学求解.docx
基于RBF神经网络的机械手逆运动学求解摘要逆运动学问题一直是机器人技术领域的研究热点之一。本文针对机械手的逆运动学问题,提出基于径向基函数(RadialBasisFunction,简称RBF)神经网络的求解方法。该方法利用神经网络的高精度和快速学习能力,对机器人运动学模型进行建模,在实际运动控制中实现了高精度的轨迹跟踪。实验结果表明,该方法在机械手逆运动学问题求解中具有较高的精度和计算速度,是一种有效的机器人控制方法。关键词:机械手,逆运动学,径向基函数神经网络,轨迹跟踪,控制1.引言逆运动学问题是机器人