
控制方法、控制装置、机器人系统、程序及记录介质.pdf

雨巷****碧易


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共34页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

控制方法、控制装置、机器人系统、程序及记录介质.pdf
控制方法在每当机器人(10)的末端执行器(11)向动作路径的动作目标点移动时,记录移动目的地的动作目标点的信息,若接收到原点复归指令,则获取上述末端执行器的当前位置,检测返回目标点的信息作为用于使上述末端执行器返回到动作路径的原点的返回路径上的点的信息,作为第(k+1)返回目标点,从在第k返回目标点之前已到达的上述动作目标点的信息之中,检测在上述第k返回目标点的紧前已到达或距上述第k返回目标点最近的距离的上述动作目标点的信息,通过反复进行上述返回目标点的信息的检测,从而检测第2返回目标点~第(n+1)返回
控制装置、控制方法及记录有程序的记录介质.pdf
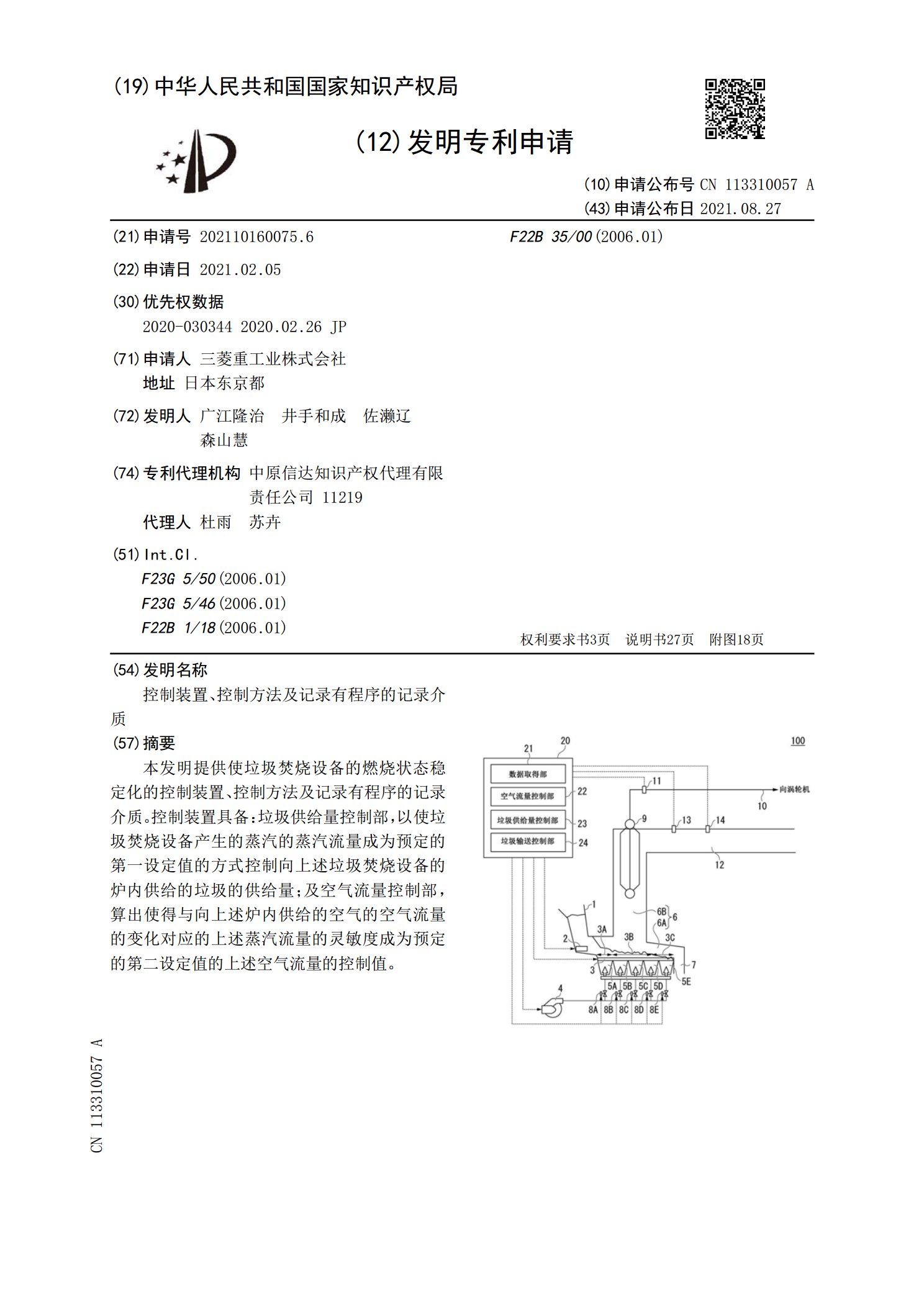
本发明提供使垃圾焚烧设备的燃烧状态稳定化的控制装置、控制方法及记录有程序的记录介质。控制装置具备:垃圾供给量控制部,以使垃圾焚烧设备产生的蒸汽的蒸汽流量成为预定的第一设定值的方式控制向上述垃圾焚烧设备的炉内供给的垃圾的供给量;及空气流量控制部,算出使得与向上述炉内供给的空气的空气流量的变化对应的上述蒸汽流量的灵敏度成为预定的第二设定值的上述空气流量的控制值。

游戏控制装置、游戏控制方法、程序、记录介质、游戏系统.pdf
本发明的游戏控制装置具有:执行单元(52),其执行第1游戏;判定单元(53),其判定用户对所述第1游戏的执行状况、或所述用户与其他用户在所述第1游戏中的关系程度是否满足规定的条件;提供单元(54),其在通过所述判定单元(53)判定为满足所述规定的条件的情况下,将针对所述用户表示满足了所述规定的条件的第1信息提供到执行第2游戏的第2游戏控制装置;以及通知单元(55),其在通过所述判定单元(53)判定为满足所述规定的条件的情况下,将在所述第2游戏中被赋予奖励的情况通知给所述用户。

游戏控制装置、游戏控制方法、程序、记录介质、游戏系统.pdf
本发明的游戏控制装置具有:执行单元,其在用户与对战对方之间,执行基于由物体构成的组的对战游戏;关联单元,其对用户和多个物体进行关联;设定单元,其根据与所述用户相关联的多个物体,设定所述用户的多个组;对应单元,其分别使由所述设定单元设定的多个组与组的类别对应;判定单元,其在所述对战游戏的执行时,判定所述对战对方的组的类别;以及选择单元,其选择所述多个组中的、与由所述判定单元判定出的对战对方的类别相对应的组,作为应用于与所述对战对方的对战的所述用户的组。

游戏控制装置、游戏控制方法、程序、记录介质、游戏系统.pdf
提供游戏控制装置、游戏控制方法、程序、记录介质、游戏系统,能够使用户更明确地感觉到伙伴的存在所带来的益处。本发明的游戏控制装置具有:关联赋予单元,其将用户之间关联起来;执行单元,其按每一用户来执行游戏;取得单元,其根据关于规定的输入操作的信息,取得与第1用户关联起来的用户在所述游戏中的进展程度的信息;以及赋予单元,其根据由所述取得单元取得的所述进展程度的信息,对所述第1用户赋予在所述游戏上的特别奖励。