
PID算法的C语言实现.docx

fa****楠吖


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

PID算法的C语言实现.docx
PID算法的C语言实现PID算法的C语言实现积分饱和通俗讲就是系统在一个偏差方向上的饱和,下面一起来跟着小编学习一下PID算法的C语言实现方法吧,希望可以帮助到大家!比如一个系统设定了输出不会超过100,但因为出现一个方向上的偏差积分使得输出超过了100,此时达到了饱和状态,如果继续在这个方向上积分会导致PID控制超过100系统却运行在100,相当于积分调节对系统输出没有作用,就出现失控的状态,这是系统不能接受的,而且饱和积分越深,退出饱和就越久。上面是在正向的饱和,负向的饱和类似!为了解决这个问题,我们

PID算法的C语言实现.docx
PID算法的C语言实现PID算法的C语言实现积分饱和通俗讲就是系统在一个偏差方向上的饱和,下面一起来跟着小编学习一下PID算法的C语言实现方法吧,希望可以帮助到大家!比如一个系统设定了输出不会超过100,但因为出现一个方向上的偏差积分使得输出超过了100,此时达到了饱和状态,如果继续在这个方向上积分会导致PID控制超过100系统却运行在100,相当于积分调节对系统输出没有作用,就出现失控的状态,这是系统不能接受的,而且饱和积分越深,退出饱和就越久。上面是在正向的饱和,负向的饱和类似!为了解决这个问题,我们

PID算法的C语言实现:抗积分饱和的PID优化.docx
PID算法的C语言实现:抗积分饱和的PID优化PID算法的C语言实现:抗积分饱和的PID优化导语:C语言的设计目标是提供一种能以简易的方式编译、处理低级存储器、产生少量的机器码以及不需要任何运行环境支持便能运行的编程语言。下面我们来看看PID算法的C语言实现:抗积分饱和的PID优化,希望对大家有所帮助。积分饱和通俗讲就是系统在一个偏差方向上的.饱和,比如一个系统设定了输出不会超过100,但因为出现一个方向上的偏差积分使得输出超过了100,此时达到了饱和状态,如果继续在这个方向上积分会导致PID控制超过10
PID控制算法的C语言实现完整版精编版.pdf
PID控制算法的C语言实现完整版文件编码(008-TTIG-UTITD-GKBTT-PUUTI-WYTUI-8256)PID控制算法的C语言实现一PID算法原理最近两天在考虑一般控制算法的C语言实现问题,发现网络上尚没有一套完整的比较体系的讲解。于是总结了几天,整理一套思路分享给大家。在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设计与实现过程,对于一般的研发人员来讲,应该是足够应对一般研发问题了,而难能可贵的是,在我所接触的控制算法当中,PID控
温度控制的PID算法的C语言程序.doc
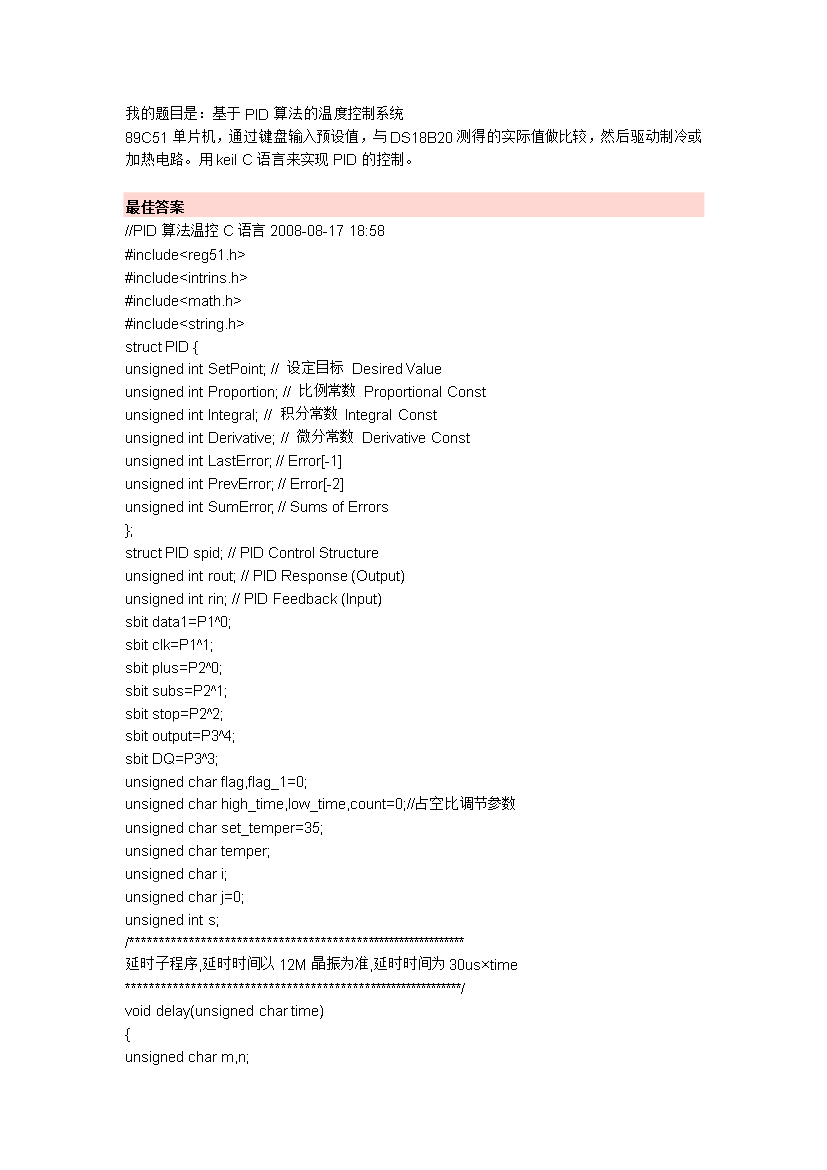
我的题目是:基于PID算法的温度控制系统89C51单片机,通过键盘输入预设值,与DS18B20测得的实际值做比较,然后驱动制冷或加热电路。用keilC语言来实现PID的控制。最佳答案//PID算法温控C语言2008-08-1718:58#include<reg51.h>#include<intrins.h>#include<math.h>#include<string.h>structPID{unsignedintSetPoint;//设定目标DesiredValueunsignedintProporti