
估计系统、估计装置以及估计方法.pdf

长春****主a


1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共34页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

估计系统、估计装置以及估计方法.pdf
估计系统包含:学习部,其使用包含被赋予了正解的多个样本数据的第1数据集、和包含未被赋予正解的多个样本数据的第2数据集,生成估计模型;以及估计部,其决定估计结果。估计模型包含编码器,所述编码器根据样本数据,计算不依赖于第1数据集和第2数据集的第1特征量、以及依赖于第1数据集或第2数据集的第2特征量。学习部构成为对编码器进行学习,使得针对第1数据集中包含的第1样本数据、和第2数据集中包含的应被赋予与对第1样本数据赋予的正解相同的正解的第2样本数据的对,根据任意的样本数据都计算出相同的第1特征量。
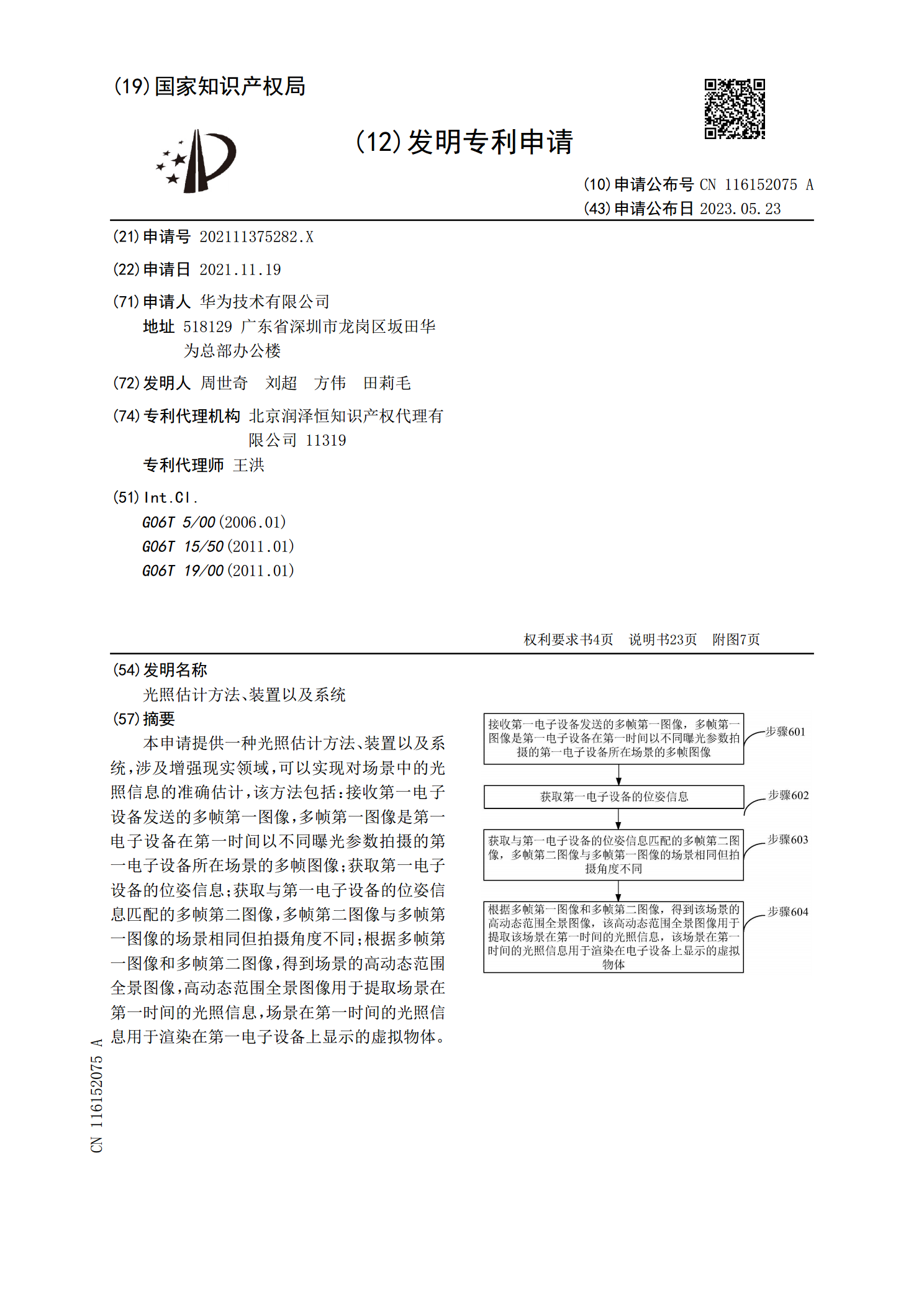
光照估计方法、装置以及系统.pdf
本申请提供一种光照估计方法、装置以及系统,涉及增强现实领域,可以实现对场景中的光照信息的准确估计,该方法包括:接收第一电子设备发送的多帧第一图像,多帧第一图像是第一电子设备在第一时间以不同曝光参数拍摄的第一电子设备所在场景的多帧图像;获取第一电子设备的位姿信息;获取与第一电子设备的位姿信息匹配的多帧第二图像,多帧第二图像与多帧第一图像的场景相同但拍摄角度不同;根据多帧第一图像和多帧第二图像,得到场景的高动态范围全景图像,高动态范围全景图像用于提取场景在第一时间的光照信息,场景在第一时间的光照信息用于渲染在

风估计系统、风估计方法以及程序.pdf
即使不采用风向风速传感器也能够简单且正确地估计期望位置的风向和风速。风估计系统(1)的移动指示单元(32)向具备检测与位置变化有关的信息的传感器部(14)的无人飞行器(10)指示移动。下落控制单元(34)在无人飞行器(10)通过移动指示单元(32)的指示移动后,使无人飞行器(10)自由下落。估计单元(39)基于在无人飞行器(10)的下落过程中传感器部(14)检测到的与位置变化有关的信息,估计下落位置的风向以及风速中的至少一方。

注视位置估计系统、注视位置估计系统的控制方法、注视位置估计装置、注视位置估计装置的控制方法、程序以及信息存储介质.pdf
本发明提供注视位置估计系统,其不用检测虹膜中心位置或者估计眼球中心的投影位置就能够估计用户的注视位置。摄影部(17)拍摄观看显示单元所显示的画面的用户的面部。区域检测部(32)从摄影部(17)的摄影图像检测用户的面部区域与用户的眼睛以外的规定部位区域的至少一方和用户的眼睛区域。面积/位置信息取得部(60)取得眼睛区域的面积信息和位置信息、面部区域与规定部位区域中的至少一方的面积信息和位置信息。注视位置估计部(62)根据由面积/位置信息取得部(60)取得的面积信息和位置信息,估计用户正在注视的画面内的位置。
估计装置、估计方法、程序以及学习模型生成装置.pdf
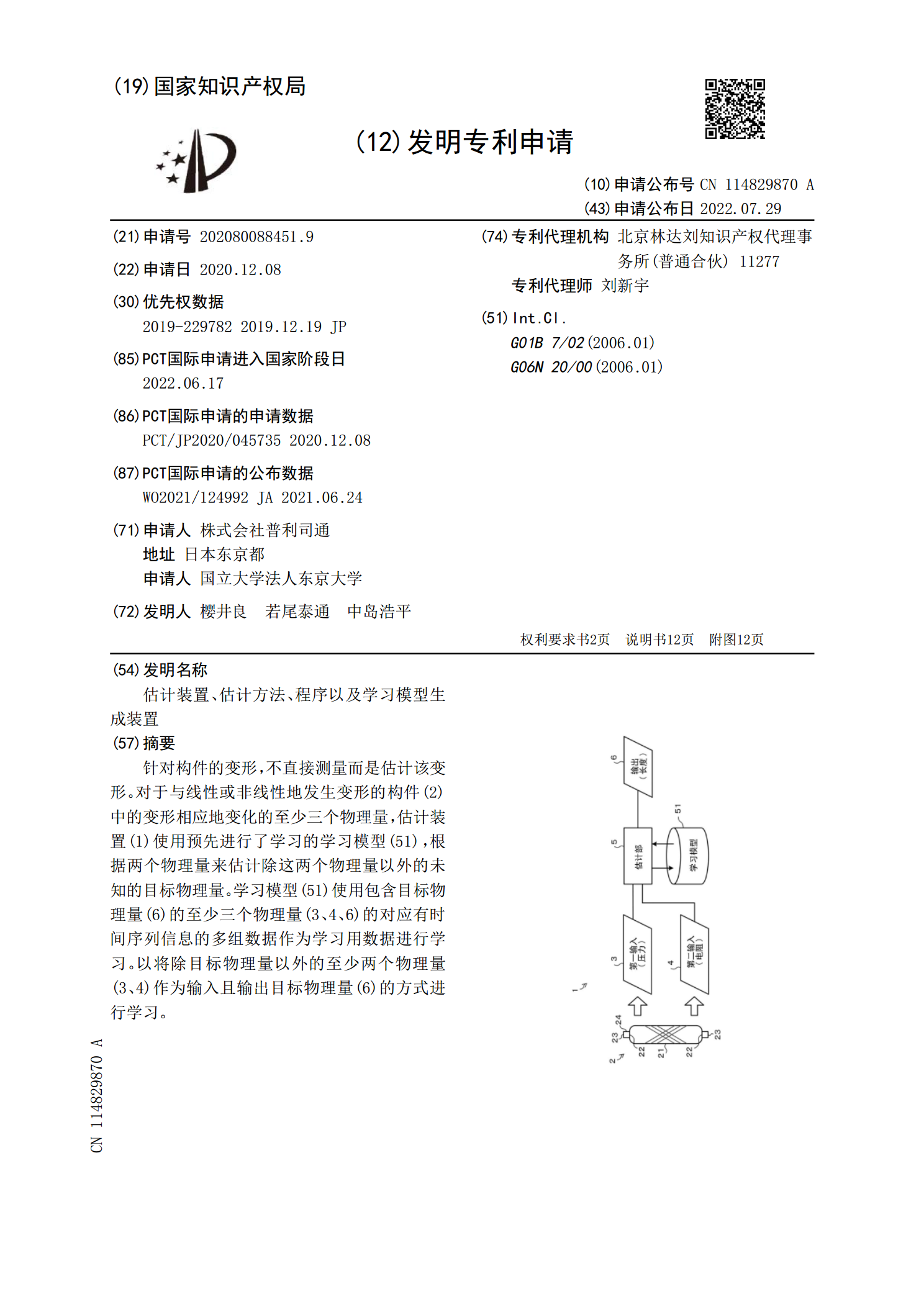
针对构件的变形,不直接测量而是估计该变形。对于与线性或非线性地发生变形的构件(2)中的变形相应地变化的至少三个物理量,估计装置(1)使用预先进行了学习的学习模型(51),根据两个物理量来估计除这两个物理量以外的未知的目标物理量。学习模型(51)使用包含目标物理量(6)的至少三个物理量(3、4、6)的对应有时间序列信息的多组数据作为学习用数据进行学习。以将除目标物理量以外的至少两个物理量(3、4)作为输入且输出目标物理量(6)的方式进行学习。