
一种风洞大攻角装置和控制系统.pdf

鸿朗****ka

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种风洞大攻角装置和控制系统.pdf
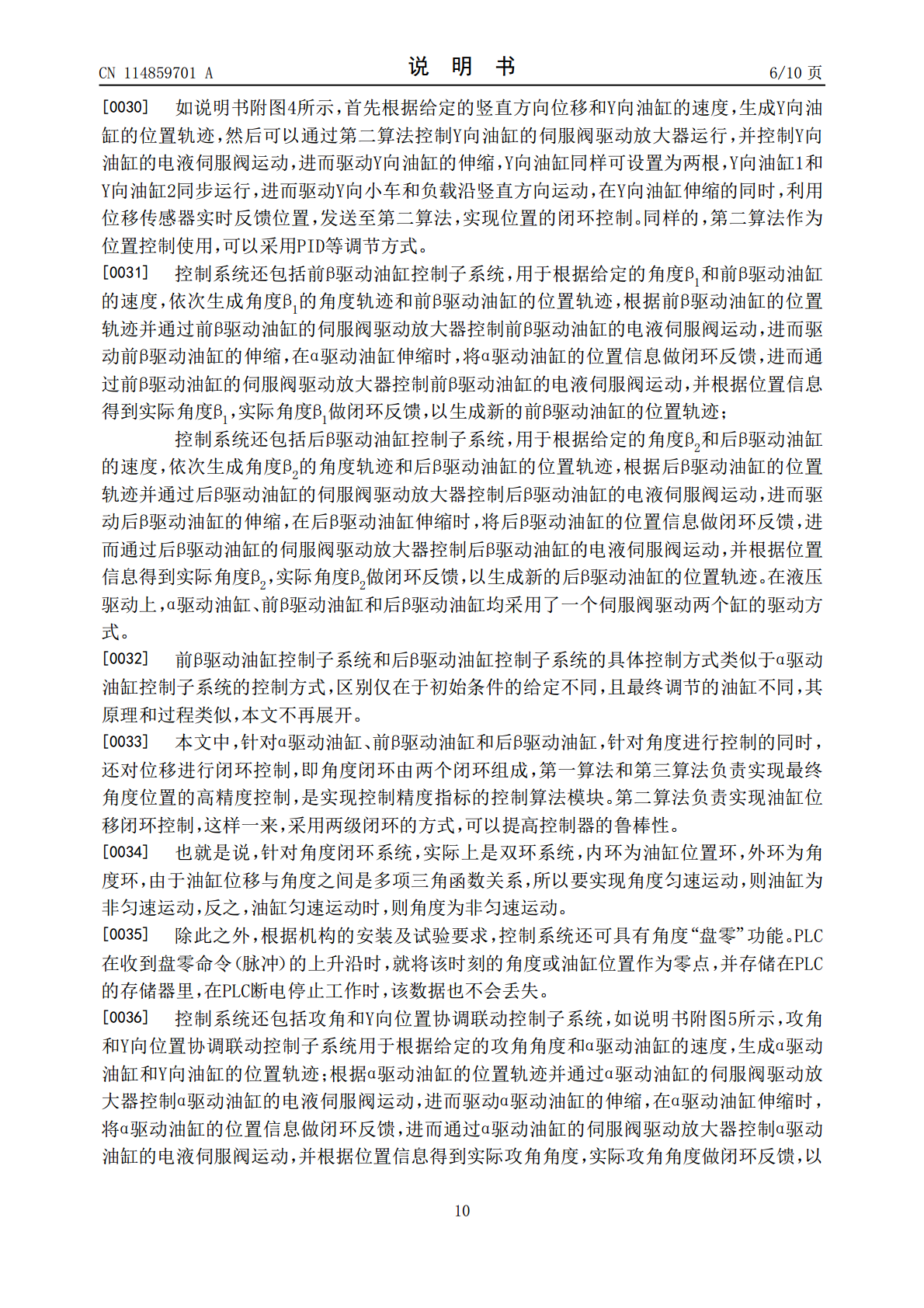
本发明公开了一种风洞大攻角装置和控制系统,控制系统用于控制风洞大攻角装置,控制系统包括:α驱动油缸控制子系统、Y向油缸位移控制子系统、前β驱动油缸控制子系统和后β驱动油缸控制子系统,α驱动油缸控制子系统用于根据给定的攻角角度和α驱动油缸的速度调节攻角角度,Y向油缸位移控制子系统用于根据给定的竖直方向位移和Y向油缸的速度调节模型的高度,前β驱动油缸控制子系统用于根据给定的角度β<base:Sub>1</base:Sub>和前β驱动油缸的速度调节角度β<base:Sub>1</base:Sub>,后β驱动油缸

多自由度风洞大攻角装置.pdf
本发明公开了一种多自由度风洞大攻角装置,包括:横移机构、偏航机构、攻角机构、主框架、上框架、主支杆、尾支杆、支杆连接杆和第一升降机;其中,所述横移机构位于底部;所述偏航机构与所述横移机构相连接;所述攻角机构与所述偏航机构相连接;所述主框架与所述攻角机构相连接;所述上框架与所述主框架相连接;所述主支杆和所述尾支杆安装在所述攻角机构上;所述支杆连接杆将所述主支杆和所述尾支杆相连接;所述第一升降机与所述主框架相连接。本发明能够使模型实现上下、左右两个自由度的平移运动和俯仰、偏航两个自由度的旋转运动,并能实现位置

一种风洞攻角调整装置.pdf
本发明公开一种风洞攻角调整装置,所述风洞攻角调整装置包括:X轴移动机构、Y轴移动机构、偏航角调节机构、俯仰角调节机构,通过设置X轴移动机构、Y轴移动机构、偏航角调节机构、俯仰角调节机构,从而实现四个自由度的调整,在有限的试验段空间内采用电机搭载于弯刀板上随模型支杆一起回转运动的方式大大增加了俯仰角的调整范围,本机构的俯仰角调整范围为-10°~40°相较于传统方式提高了近10°,丰富了攻角机构的调整姿态,大大增加了攻角机构整体的调整范围,解决了现有技术中风洞攻角机构在有限空间内攻角范围狭小,且攻角机构的姿态

一种亚跨超声速风洞90°大攻角装置.pdf
本发明公开了一种亚跨超声速风洞90°大攻角装置,包括下底板、限位器,立柱、上底板、伺服电机减速机组件、主输出齿轮、大直径齿轮、主丝杠组件、辅丝杠组件、小直径齿轮、竖直锥齿轮组件、水平锥齿轮组件、配重组件、辅丝杠转接头组件、主丝杠转接头组件、拉杆、油杯、拉线传感器组件、密封板、管线组件、支臂、连杆、管接头组件、支撑段、天平模型支杆组件、直线导轨、滑块支座组件、假支杆。本专利结构合理简单,安装方便,精度高,阻塞度小,试验模型大,试验效率高,成本低,实现攻角范围大,能够满足风洞连续走90°甚至120°大范围攻角

高速风洞大攻角俯仰动态失速试验装置.pdf
本发明提供了一种高速风洞大攻角俯仰动态失速试验装置,所述装置由电机驱动,通过皮带传动轮带动飞轮转动,飞轮的中心轴驱动同步传动齿轮组,将运动动能传递给主驱动轮,由主驱动轮、连杆和转窗组成四连杆运动系统,实现将飞轮转动转换为转窗的往返振荡,进而带动固连的飞行器模型实现大攻角俯仰运动。本发明的高速风洞大攻角俯仰动态失速试验装置,克服了现有高速风洞运行时振动强烈、试验段驻室空间狭小、试验段结构响应频率较低、环境噪音大等困难,能提供飞行器模型大攻角(达75°)、大幅度(?15°~75°)、高频率(0~6Hz)条件下