
关节组件.pdf

一条****彩妍

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共35页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

关节组件.pdf
本发明涉及一种用于机器人(100)的关节组件(1),包括:与输出部件(8)连接的罩体(26),罩体包括罩体壁部(26A);包括波发生器(7)、柔性齿轮(13)和连接至输出部件(8)的刚性齿轮(36)的应变波传动系统(90),其中波发生器(7)在转子轴(3)作用下转动,转子轴由包括定子(15)和转子磁体(16)的电动马达(140)驱动,转子磁体(16)附装至转子轴(3),并且其中,关节组件(1)还包括构造成停止/阻止转子轴(3)与柔性齿轮(13)之间的相对运动的转子制动器(30)和构造成测量罩体(26)相对

关节组件.pdf
本发明涉及一种用于机器人(100)的关节组件(1),包括:与输出部件(8)连接的罩体(26),罩体包括罩体壁部(26A);包括波发生器(7)、柔性齿轮(13)和连接至输出部件(8)的刚性齿轮(36)的应变波传动系统(90),其中波发生器(7)在转子轴(3)作用下转动,转子轴由包括定子(15)和转子磁体(16)的电动马达(140)驱动,转子磁体(16)附装至转子轴(3),并且其中,关节组件(1)还包括构造成停止/阻止转子轴(3)与柔性齿轮(13)之间的相对运动的转子制动器(30)和构造成测量罩体(26)相对
关节组件和包括关节组件的运动辅助设备.pdf
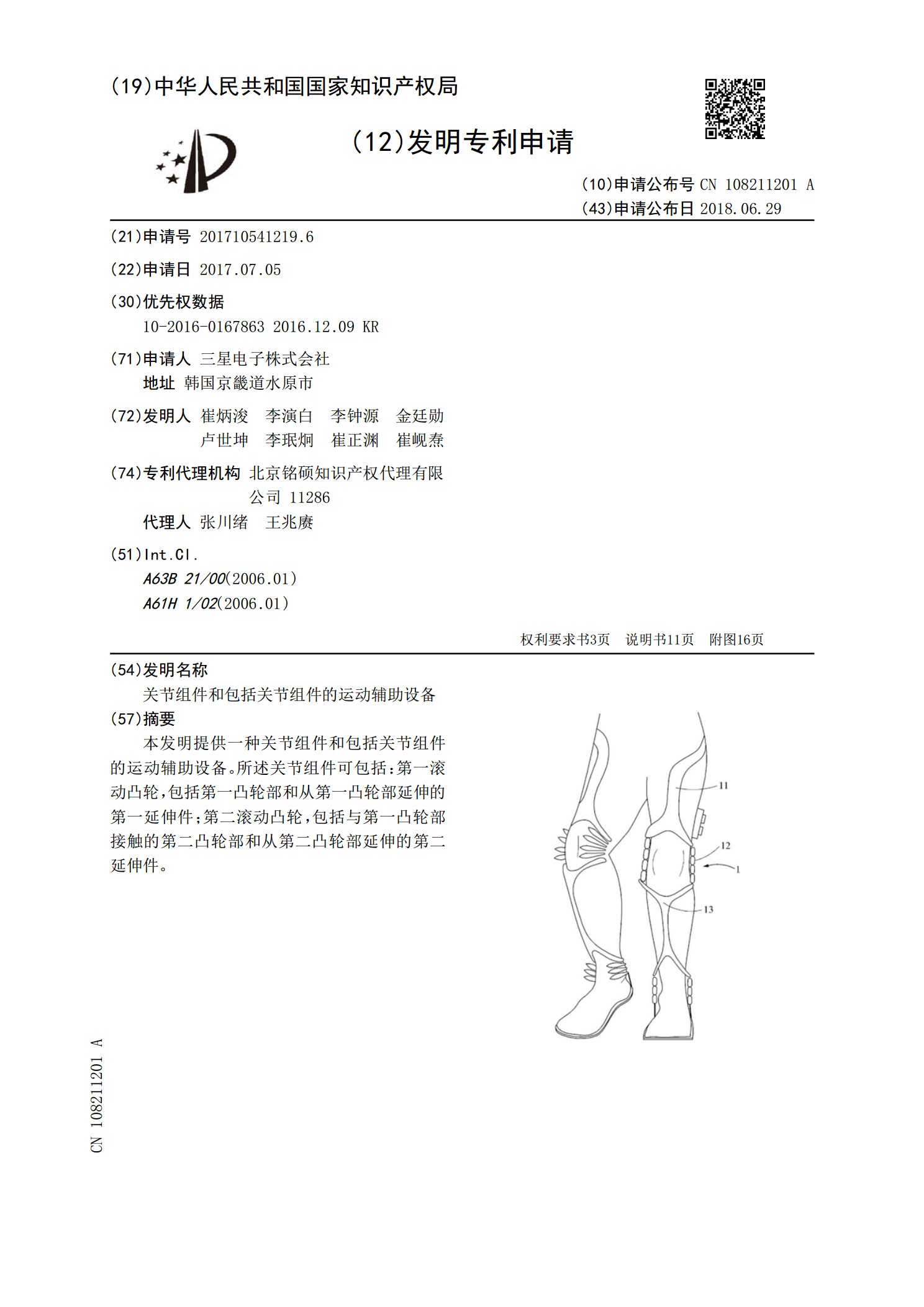
本发明提供一种关节组件和包括关节组件的运动辅助设备。所述关节组件可包括:第一滚动凸轮,包括第一凸轮部和从第一凸轮部延伸的第一延伸件;第二滚动凸轮,包括与第一凸轮部接触的第二凸轮部和从第二凸轮部延伸的第二延伸件。
转动关节及转动关节组件.pdf
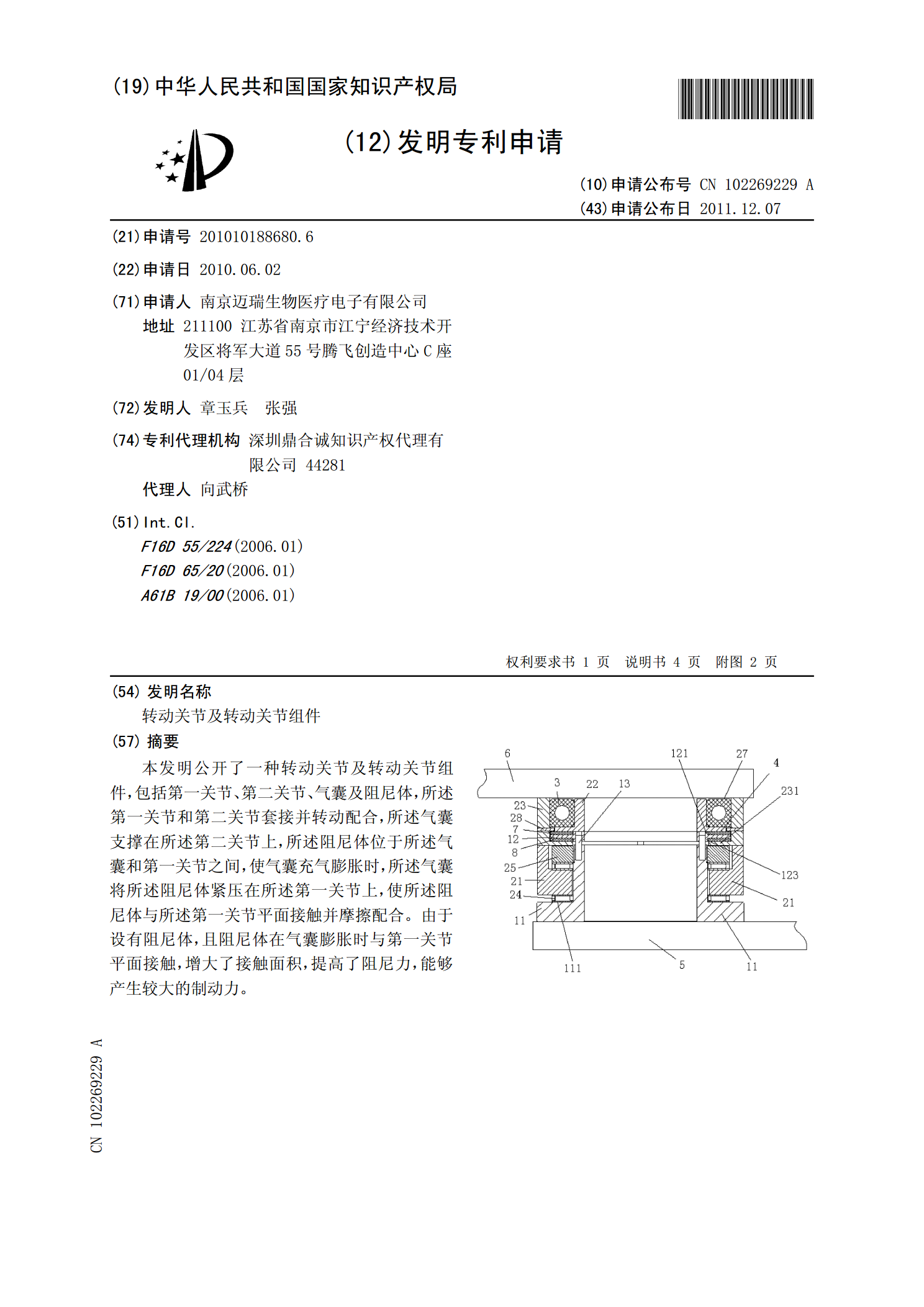
本发明公开了一种转动关节及转动关节组件,包括第一关节、第二关节、气囊及阻尼体,所述第一关节和第二关节套接并转动配合,所述气囊支撑在所述第二关节上,所述阻尼体位于所述气囊和第一关节之间,使气囊充气膨胀时,所述气囊将所述阻尼体紧压在所述第一关节上,使所述阻尼体与所述第一关节平面接触并摩擦配合。由于设有阻尼体,且阻尼体在气囊膨胀时与第一关节平面接触,增大了接触面积,提高了阻尼力,能够产生较大的制动力。

关节组件以及包括该关节组件的运动辅助装置.pdf
本发明提供一种关节组件以及包括该关节组件的运动辅助装置。一种关节组件可包括:膨胀圈,包括凸轮轮廓;转子,被配置为相对于膨胀圈旋转;以及弹性体,被配置为连接至转子,并且响应于转子相对于膨胀圈旋转而存储与凸轮轮廓对应的弹性势能。