
一种基于语义分割的周视可行驶区域检测方法.pdf

一条****涛k

1/6
2/6

3/6
4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于语义分割的周视可行驶区域检测方法.pdf
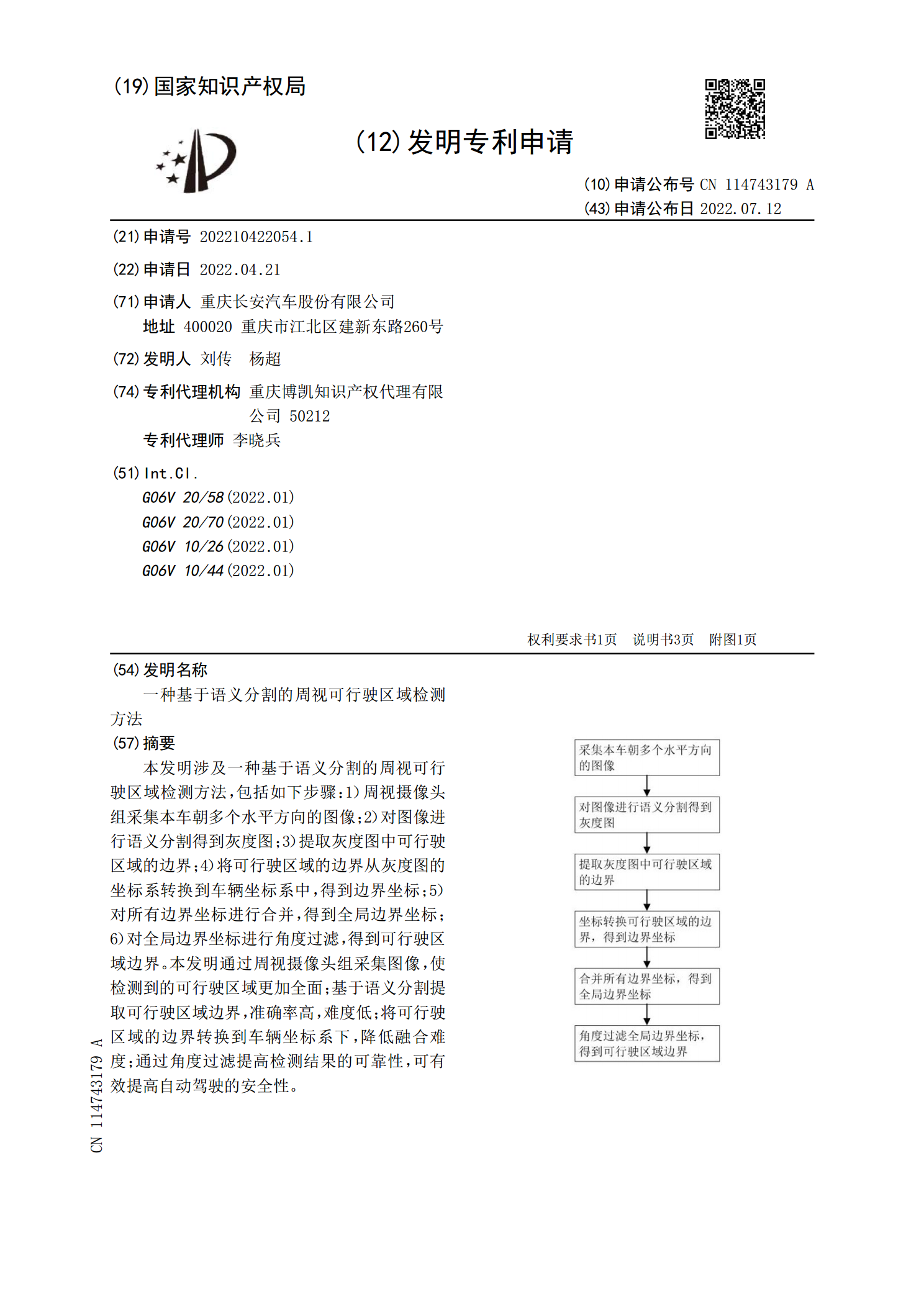
本发明涉及一种基于语义分割的周视可行驶区域检测方法,包括如下步骤:1)周视摄像头组采集本车朝多个水平方向的图像;2)对图像进行语义分割得到灰度图;3)提取灰度图中可行驶区域的边界;4)将可行驶区域的边界从灰度图的坐标系转换到车辆坐标系中,得到边界坐标;5)对所有边界坐标进行合并,得到全局边界坐标;6)对全局边界坐标进行角度过滤,得到可行驶区域边界。本发明通过周视摄像头组采集图像,使检测到的可行驶区域更加全面;基于语义分割提取可行驶区域边界,准确率高,难度低;将可行驶区域的边界转换到车辆坐标系下,降低融合难
基于语义分割的可行驶区域检测方法.pdf
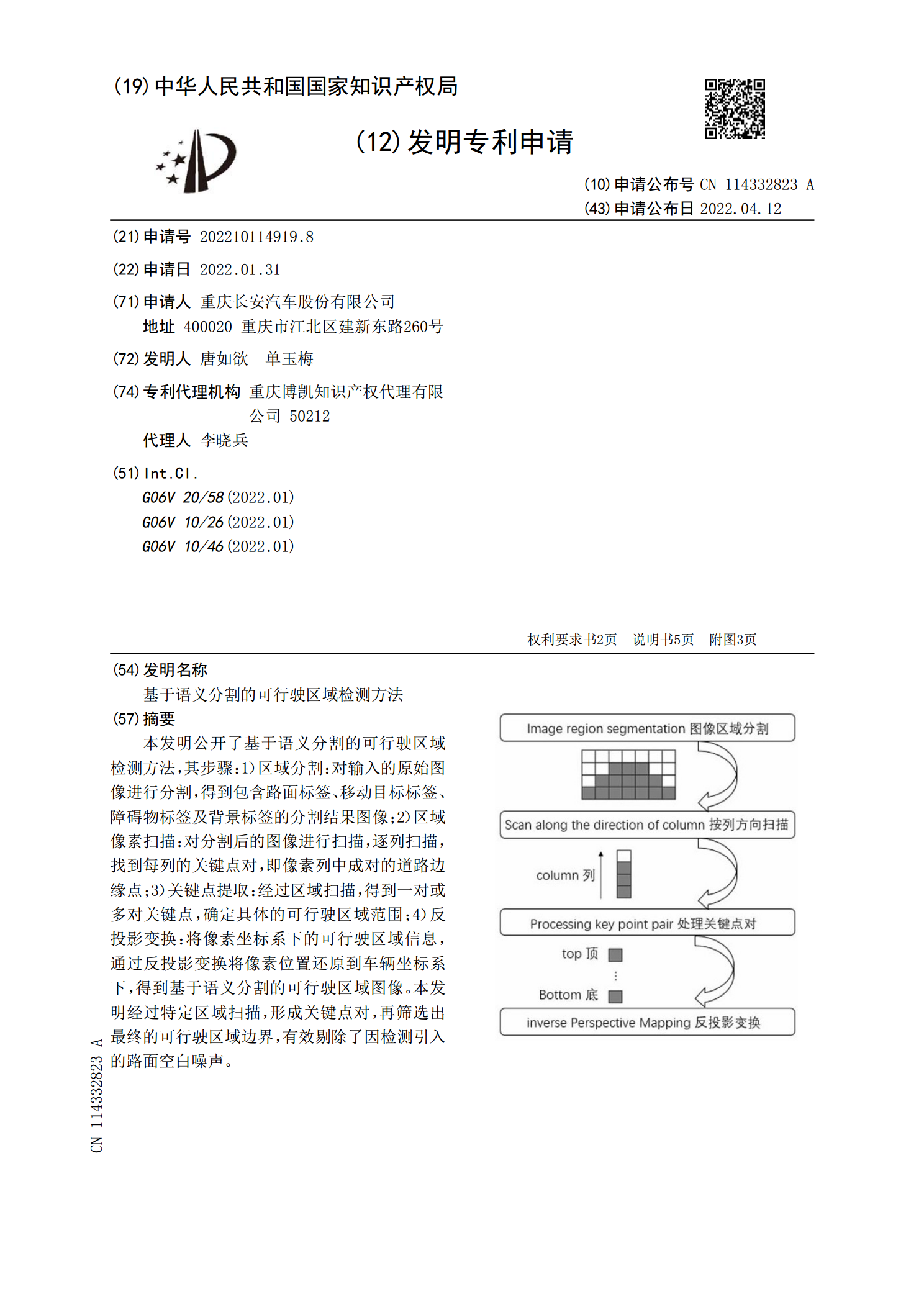
本发明公开了基于语义分割的可行驶区域检测方法,其步骤:1)区域分割:对输入的原始图像进行分割,得到包含路面标签、移动目标标签、障碍物标签及背景标签的分割结果图像;2)区域像素扫描:对分割后的图像进行扫描,逐列扫描,找到每列的关键点对,即像素列中成对的道路边缘点;3)关键点提取:经过区域扫描,得到一对或多对关键点,确定具体的可行驶区域范围;4)反投影变换:将像素坐标系下的可行驶区域信息,通过反投影变换将像素位置还原到车辆坐标系下,得到基于语义分割的可行驶区域图像。本发明经过特定区域扫描,形成关键点对,再筛选

基于语义分割的车辆行驶车道定位方法.docx
基于语义分割的车辆行驶车道定位方法基于语义分割的车辆行驶车道定位方法摘要:车辆行驶车道定位是自动驾驶系统中的一个关键任务,它可为车辆提供准确的位置估计信息,从而实现自动驾驶的目标。本文提出了一种基于语义分割的车辆行驶车道定位方法。首先,通过使用深度学习模型,对输入图像进行语义分割,得到各个像素点的语义标签。然后,根据语义标签和车道几何形状的先验知识,将车辆行驶车道从语义分割结果中提取出来。最后,利用车道上的特征点进行车道线拟合,实现车辆行驶车道的定位。实验结果表明,本方法具有较高的定位准确性和鲁棒性。1.

一种基于语义分割网络的分治检测方法.pdf
本发明公开了一种基于语义分割网络的分治检测算法。本发明借助语义分割网络实现了距离多普勒域的杂波区域分割,并针对不同杂波区主体和边缘的特点制定了检测策略,从备选检测器组中选择适当的检测器和合理检测参数完成分治检测,在最大程度检测出目标的同时有效抑制虚警。该技术对于低空小目标的雷达探测具有重要意义。相比于检测平面归一化的方法来说,本方法不需要检测平面转换,计算量更小,同时避免了参数估计结果对检测平面转换的影响,鲁棒性更强。
一种基于语义分割技术的车道线检测方法.pdf
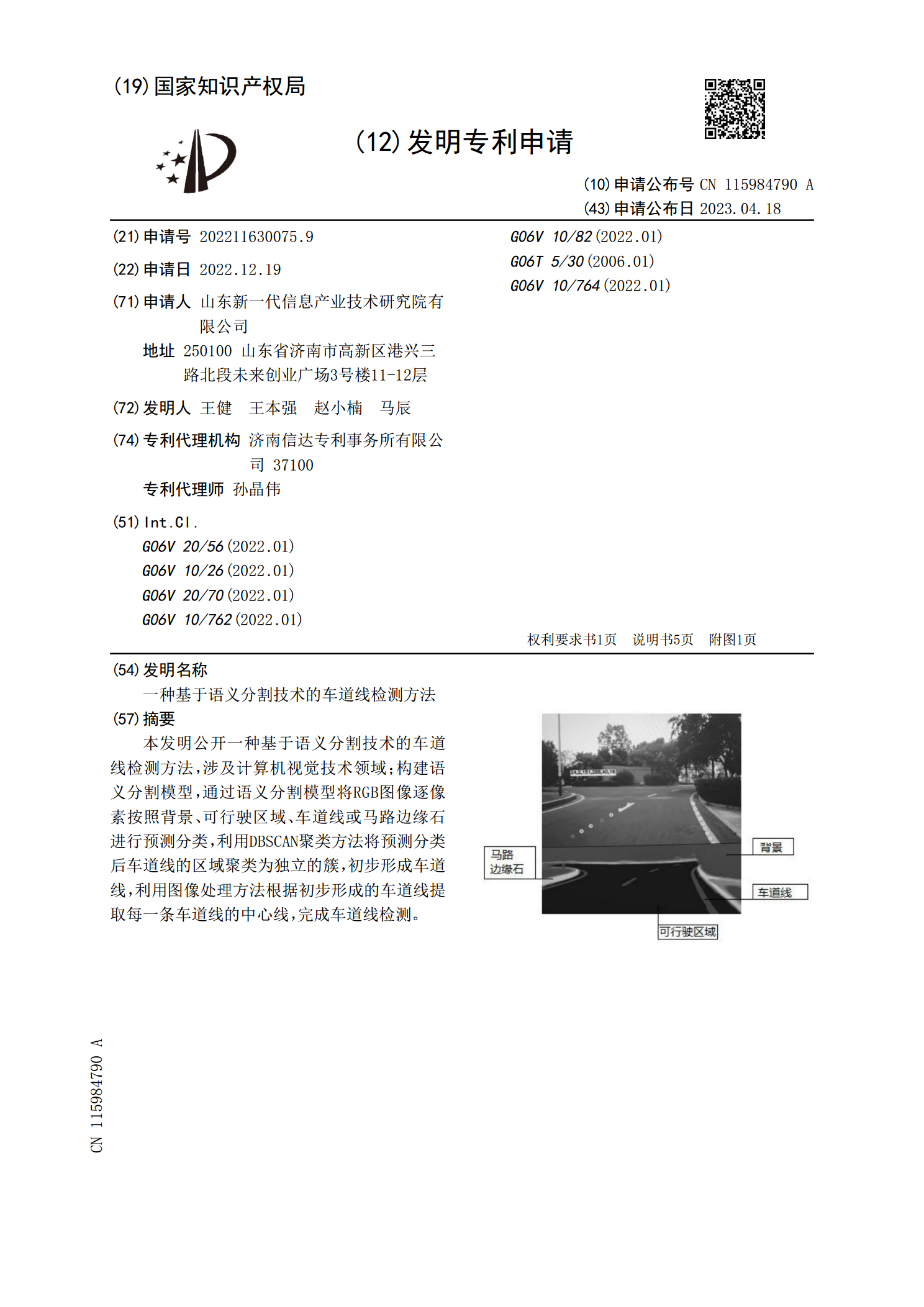
本发明公开一种基于语义分割技术的车道线检测方法,涉及计算机视觉技术领域;构建语义分割模型,通过语义分割模型将RGB图像逐像素按照背景、可行驶区域、车道线或马路边缘石进行预测分类,利用DBSCAN聚类方法将预测分类后车道线的区域聚类为独立的簇,初步形成车道线,利用图像处理方法根据初步形成的车道线提取每一条车道线的中心线,完成车道线检测。