
一种基于立体相机与IMU融合的低速无人车定位方法及系统.pdf

夏萍****文章

1/10
2/10

3/10
4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于立体相机与IMU融合的低速无人车定位方法及系统.pdf
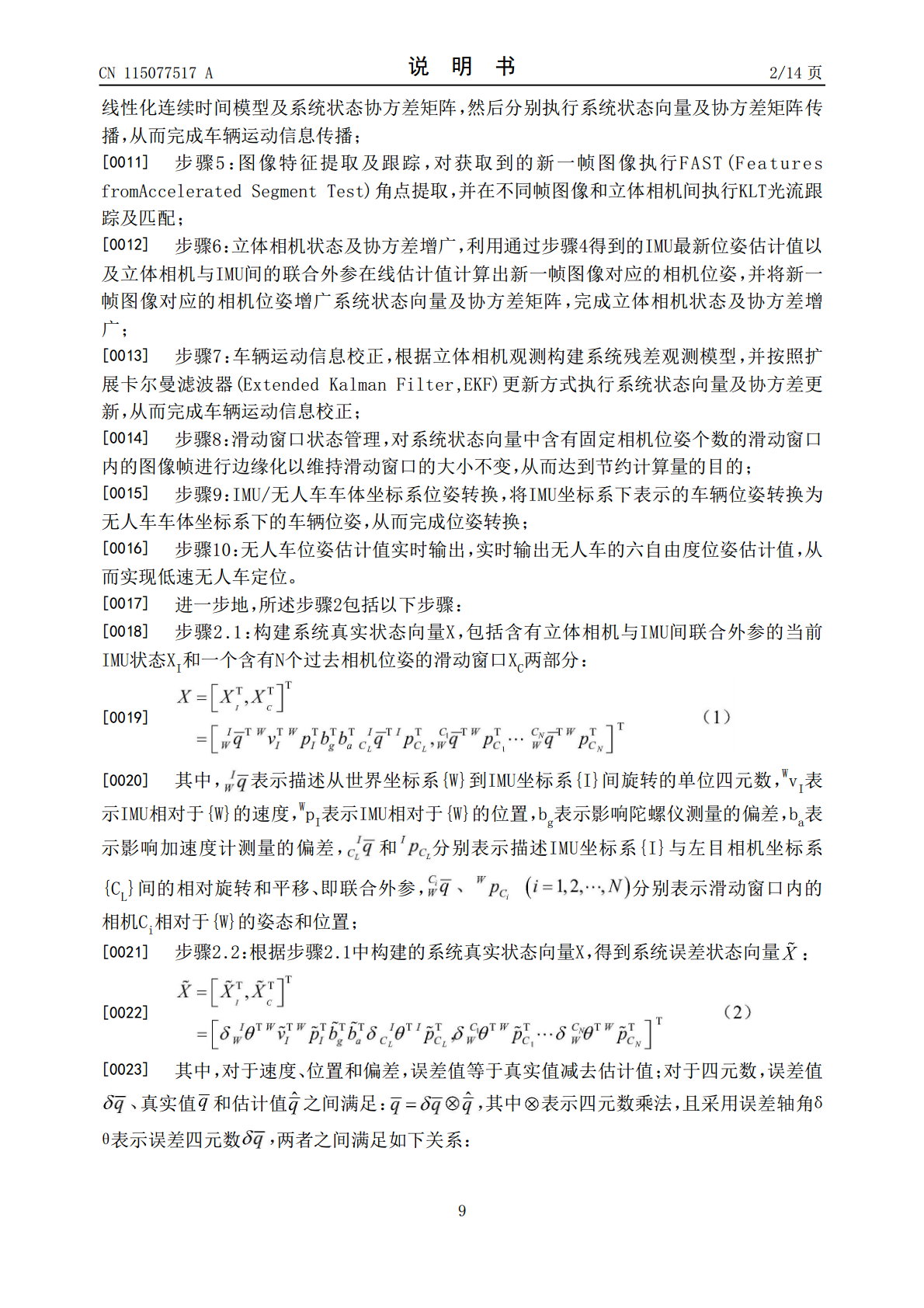
一种基于立体相机与IMU融合的低速无人车定位方法,包括以下步骤:步骤1:传感器数据获取及时空同步;步骤2:系统状态向量构建;步骤3:系统初始化判断;步骤4:车辆运动信息传播;步骤5:图像特征提取及跟踪;步骤6:立体相机状态及协方差增广;步骤7:车辆运动信息校正;步骤8:滑动窗口状态管理;步骤9:IMU/无人车车体坐标系位姿转换;步骤10:无人车位姿估计值实时输出。本发明还包括基于立体相机与IMU融合的低速无人车定位系统,包括数据获取层、数据预处理层、算法决策层和状态显示层等。本发明能够在缺失GPS及BDS
一种基于立体相机与IMU融合的低速无人车定位方法及系统.pdf
一种基于立体相机与IMU融合的低速无人车定位方法,包括以下步骤:步骤1:传感器数据获取及时空同步;步骤2:系统状态向量构建;步骤3:系统初始化判断;步骤4:车辆运动信息传播;步骤5:图像特征提取及跟踪;步骤6:立体相机状态及协方差增广;步骤7:车辆运动信息校正;步骤8:滑动窗口状态管理;步骤9:IMU/无人车车体坐标系位姿转换;步骤10:无人车位姿估计值实时输出。本发明还包括基于立体相机与IMU融合的低速无人车定位系统,包括数据获取层、数据预处理层、算法决策层和状态显示层等。本发明能够在缺失GPS及BDS
一种基于视觉slam双目相机的无人车定位系统.pdf
一种基于视觉slam双目相机的无人车定位系统,包括无人车,无人车的前部安装有双目相机,双目相机与树莓派模块有线连接,树莓派模块通过局域网与上位机连接,并与单片机有线连接;双目相机将实时采集的图像发送至树莓派模块,再由树莓派模块将图像实时的发送至上位机进行图像处理,上位机将图像处理后得到的信息反馈至树莓派模块后,树莓派模块将图像信息发送至单片机,单片机根据图像信息,发送信号至车轮驱动模块,控制车轮的运行方向。本发明通过上位机对双目相机实时采集的图片进行处理,推算出物体到相机之间的距离;并通过对图片中像素关键

多相机与IMU融合的室外机器人定位方法研究.docx
多相机与IMU融合的室外机器人定位方法研究摘要随着机器人技术的发展,室外机器人在军事、探索等领域中有着广泛的应用。机器人在环境感知、定位导航方面的能力对其任务的完成至关重要。本研究采用多相机与IMU相结合的方法,通过对机器人周围在定点放置的多个相机采集数据并利用IMU测量机器人的线性加速度和旋转速度,实现了对机器人姿态和位置的准确定位。通过实验结果表明,本方法可以实现高精度的机器人定位。关键词:室外机器人、多相机、IMU、定位引言室外机器人定位是室外机器人实现自主导航和运动控制的关键技术之一。室外环境相对

基于IMU与立体视觉融合的SLAM方法研究.docx
基于IMU与立体视觉融合的SLAM方法研究摘要:SLAM(SimultaneousLocalizationandMapping)是指在未知环境中同时进行自身定位和地图构建的技术,是自主机器人导航和场景理解的基础。本文主要研究基于IMU(InertialMeasurementUnit)与立体视觉融合的SLAM方法,通过对IMU和相机的数据进行联合处理,实现更准确和稳定的自主导航和地图构建。关键词:SLAM;IMU;立体视觉;融合1.引言SLAM技术在自主机器人、无人驾驶等领域具有广泛的应用前景。传统的SLA