
一种基于视觉slam双目相机的无人车定位系统.pdf

增梅****主啊

1/10
2/10

3/10

4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于视觉slam双目相机的无人车定位系统.pdf
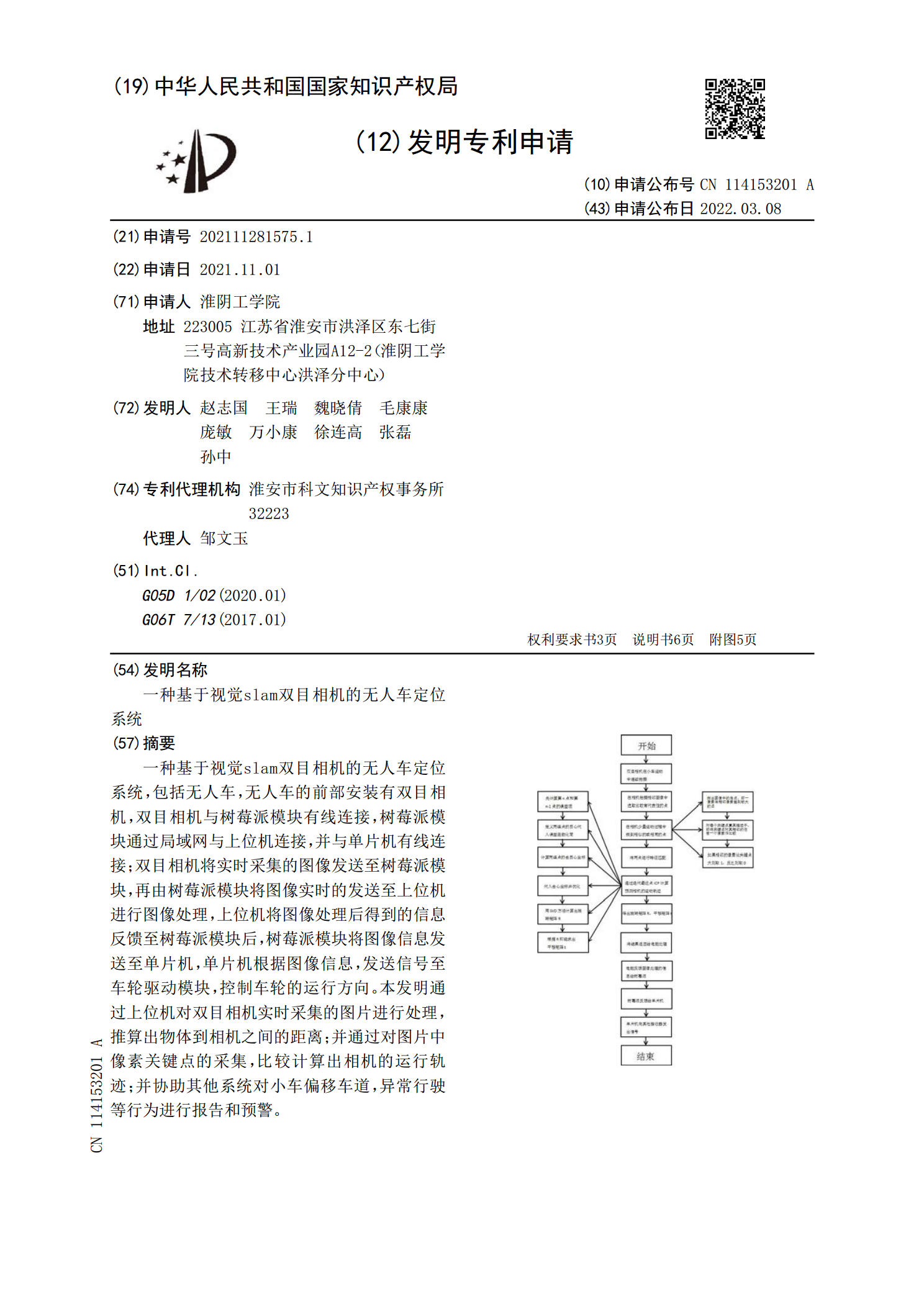
一种基于视觉slam双目相机的无人车定位系统,包括无人车,无人车的前部安装有双目相机,双目相机与树莓派模块有线连接,树莓派模块通过局域网与上位机连接,并与单片机有线连接;双目相机将实时采集的图像发送至树莓派模块,再由树莓派模块将图像实时的发送至上位机进行图像处理,上位机将图像处理后得到的信息反馈至树莓派模块后,树莓派模块将图像信息发送至单片机,单片机根据图像信息,发送信号至车轮驱动模块,控制车轮的运行方向。本发明通过上位机对双目相机实时采集的图片进行处理,推算出物体到相机之间的距离;并通过对图片中像素关键

无人车基于双目视觉的同时定位与地图构建.docx
无人车基于双目视觉的同时定位与地图构建概述随着智能驾驶技术的不断发展,自动驾驶已经成为了一个热门话题。自动驾驶技术需要一系列的技术手段来支持,例如传感器技术、决策算法等。其中,无人车的同时定位与地图构建技术是其中至关重要的一项。无人车的同时定位与地图构建技术可以让车辆获取到自身的位置信息,同时还能构建出周围环境的地图。这对于实现高精度的自动驾驶有着至关重要的作用。本文将对基于双目视觉的无人车同时定位与地图构建技术进行详细的讲解。双目视觉定位原理双目视觉定位是利用双目摄像机获取场景信息,通过计算两个图像之间

基于双目视觉的低速无人驾驶SLAM.docx
基于双目视觉的低速无人驾驶SLAM基于双目视觉的低速无人驾驶SLAM摘要:随着无人驾驶技术的快速发展,SLAM(SimultaneousLocalizationandMapping)技术成为了实现无人驾驶的重要组成部分。本文提出了一种基于双目视觉的低速无人驾驶SLAM算法,通过双目相机获取场景的深度信息,实现精确的定位与建图,并通过实验验证了该算法的有效性和稳定性。关键词:无人驾驶,SLAM,双目视觉,深度信息,定位与建图1.引言在无人驾驶的应用场景中,准确的感知和定位是保证安全性和可靠性的关键。SLAM

无人车基于双目视觉室外即时定位与地图构建.docx
无人车基于双目视觉室外即时定位与地图构建双目视觉室外即时定位与地图构建在无人车技术中具有重要作用。无人车通过感知设备获取室外环境信息,将其转化为数字化表示,并通过算法实现定位和地图创建。这份论文旨在介绍双目视觉室外即时定位与地图构建的原理、方法、应用和未来发展方向。一、双目视觉室外即时定位与地图构建的原理双目视觉是通过两个摄像头同时拍摄同一物体,利用双目视觉几何特征计算出物体的三维信息的一种技术。在室外无人车中,双目摄像头安装在车体前部,采集经过处理后的双目图像。通过比对两个摄像头得到的图像,在移动过程中

基于双目立体视觉SLAM的林下实时定位.pptx
汇报人:CONTENTSPARTONEPARTTWO技术原理技术应用场景技术优势与局限性技术发展趋势PARTTHREE系统概述系统构成与工作原理系统应用场景系统优势与局限性PARTFOUR系统设计思路系统硬件配置系统软件实现系统测试与验证PARTFIVE林业资源调查与监测森林防火与救援林业科学研究与教育未来发展方向与挑战汇报人: