
基于多介质的水下相机标定方法.pdf

一只****爱敏

1/10

2/10
3/10

4/10

5/10
6/10
7/10
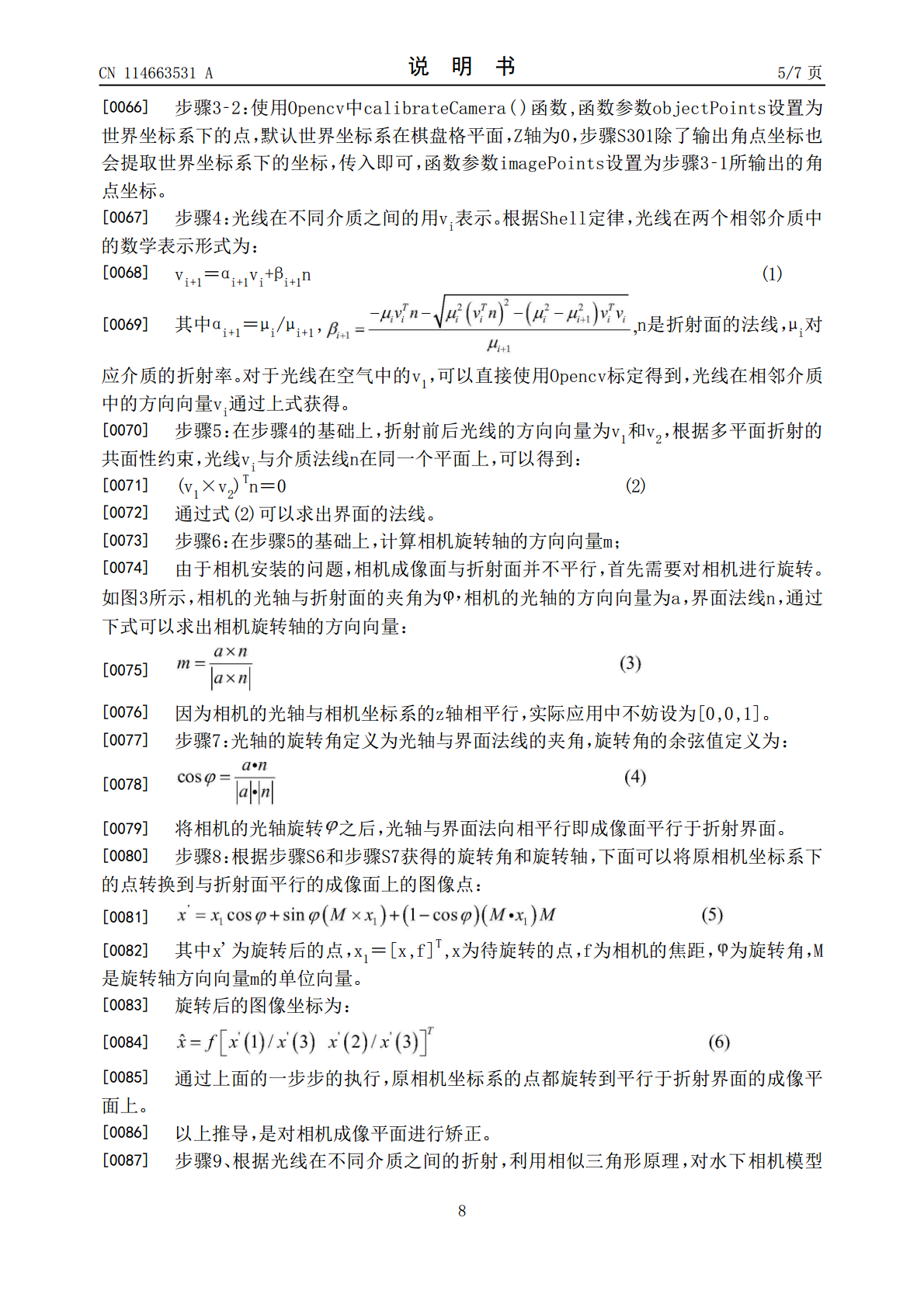
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多介质的水下相机标定方法.pdf
本发明是一种基于多介质的水下相机标定方法,包括如下步骤:步骤1固定相机与标定板之间的位置;步骤2采集标定板数据;步骤3对数据进行标定;步骤4确定光线在相邻不同介质之间折射的方向向量;步骤5根据折射光线的共面性约束,获取水下相机折射面的法线大小;步骤6计算相机旋转轴的方向向量;步骤7计算相机的旋转角;步骤8将相机成像面进行旋转,使得旋转之后的机成像平面与折射平面相平行;步骤9在步骤8进行相机旋转之后,推导空气中和水中相机的内参之间的数学关系。本发明首先通过光在不同介质之间折射关系,将相机的成像面进行旋转,使
基于道路特征的多目相机标定方法、装置、设备和介质.pdf
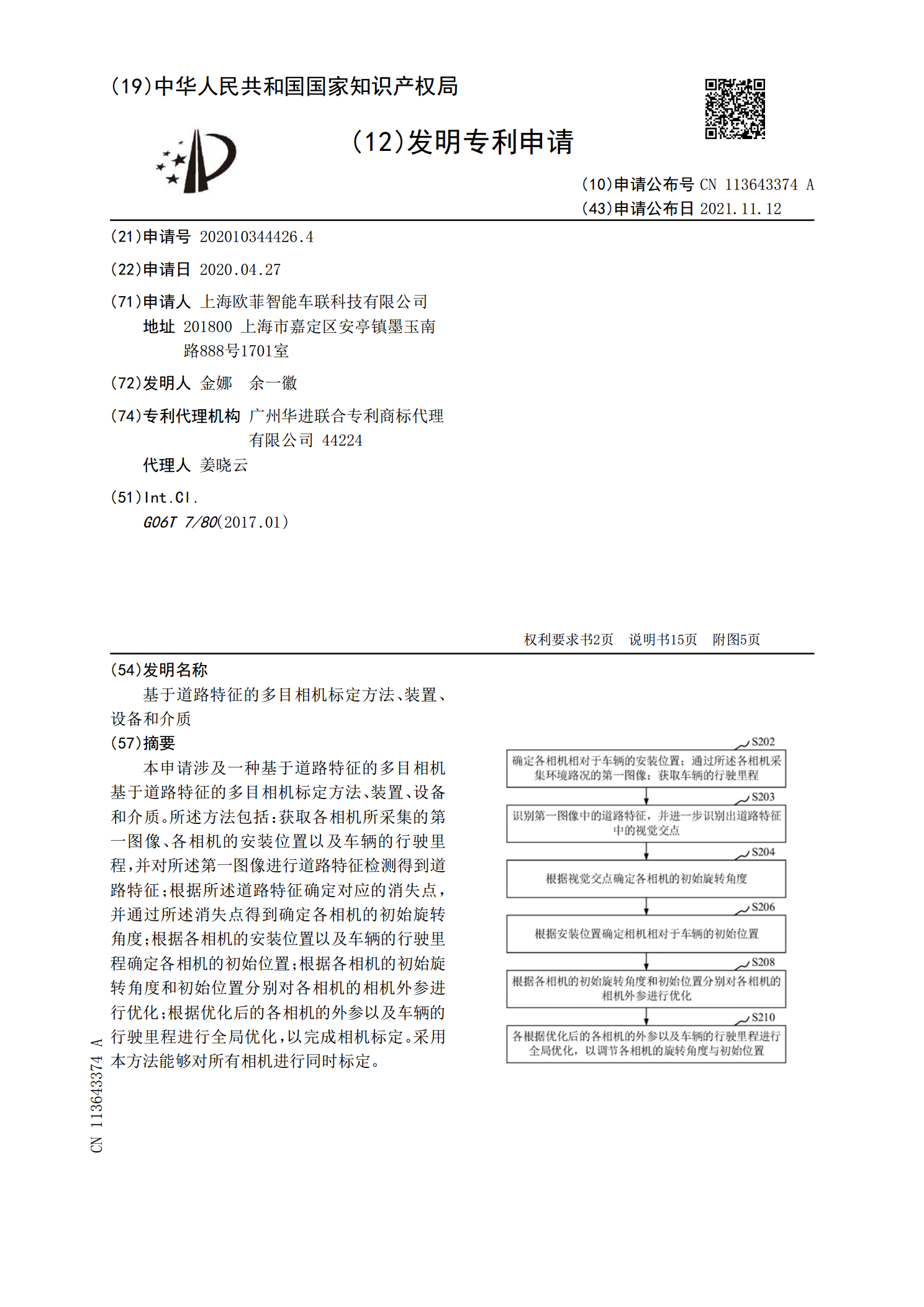
本申请涉及一种基于道路特征的多目相机基于道路特征的多目相机标定方法、装置、设备和介质。所述方法包括:获取各相机所采集的第一图像、各相机的安装位置以及车辆的行驶里程,并对所述第一图像进行道路特征检测得到道路特征;根据所述道路特征确定对应的消失点,并通过所述消失点得到确定各相机的初始旋转角度;根据各相机的安装位置以及车辆的行驶里程确定各相机的初始位置;根据各相机的初始旋转角度和初始位置分别对各相机的相机外参进行优化;根据优化后的各相机的外参以及车辆的行驶里程进行全局优化,以完成相机标定。采用本方法能够对所有相

相机标定方法、装置、设备及介质.pdf
本申请公开了一种相机标定方法、装置、设备及介质,属于摄像技术领域。相机标定方法包括:获取第一相机、第二相机和第三相机分别对于目标场景拍摄得到的第一图像、第二图像和第三图像,其中,第一相机为云台相机;提取第一图像和第二图像的特征点;匹配第一图像的特征点和第二图像的特征点,得到多个特征点对;根据第二图像和第三图像,确定目标场景在第二相机对应的坐标系中的目标深度信息;根据第一相机的初始内参、第一相机和第二相机之间的初始外参、多个特征点对和目标深度信息,确定第一相机的目标内参、第一相机和第二相机之间的目标外参。
相机标定方法、图像拼接方法、装置、介质、相机及车辆.pdf
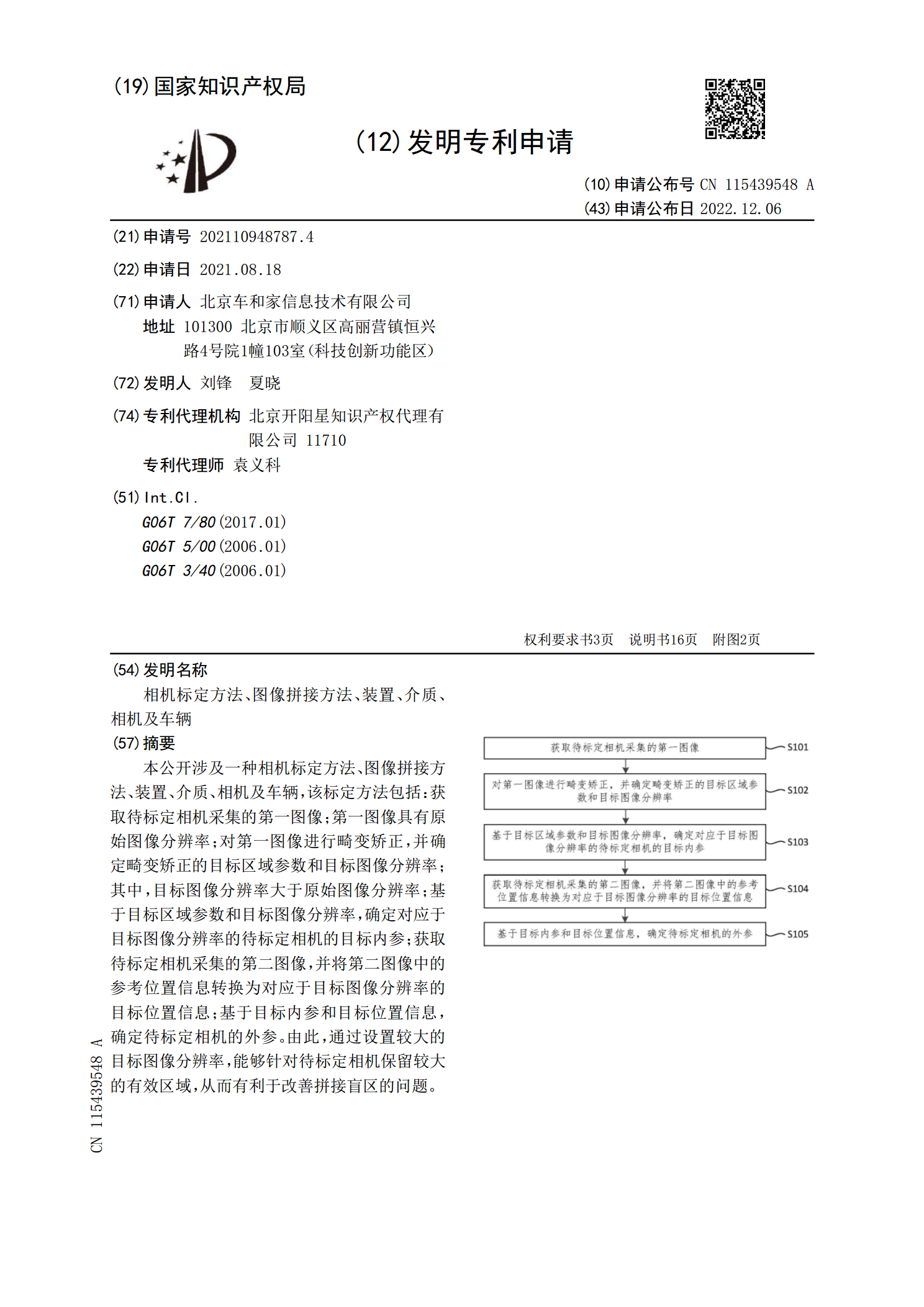
本公开涉及一种相机标定方法、图像拼接方法、装置、介质、相机及车辆,该标定方法包括:获取待标定相机采集的第一图像;第一图像具有原始图像分辨率;对第一图像进行畸变矫正,并确定畸变矫正的目标区域参数和目标图像分辨率;其中,目标图像分辨率大于原始图像分辨率;基于目标区域参数和目标图像分辨率,确定对应于目标图像分辨率的待标定相机的目标内参;获取待标定相机采集的第二图像,并将第二图像中的参考位置信息转换为对应于目标图像分辨率的目标位置信息;基于目标内参和目标位置信息,确定待标定相机的外参。由此,通过设置较大的目标图像
相机标定方法、装置、设备及存储介质.pdf
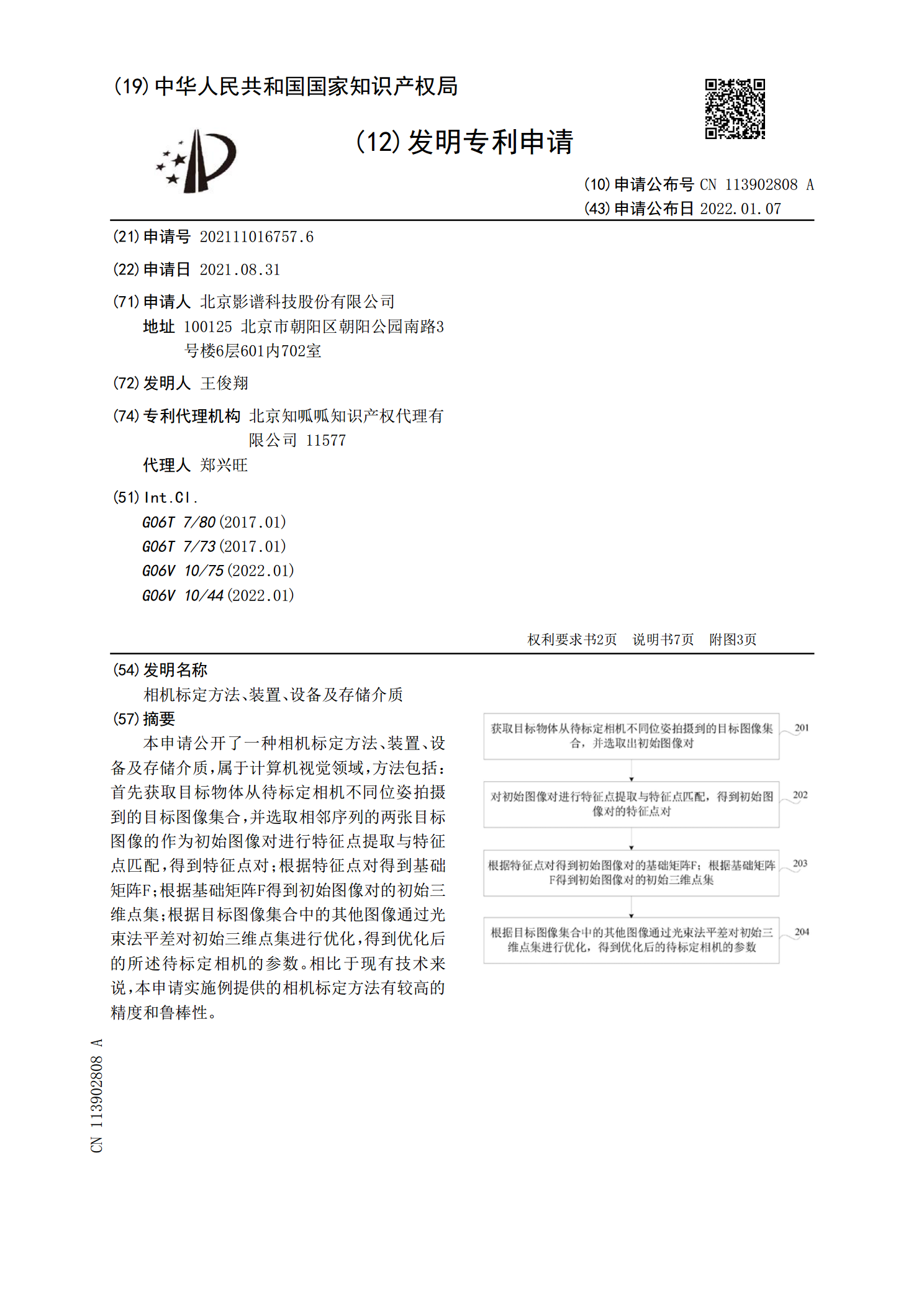
本申请公开了一种相机标定方法、装置、设备及存储介质,属于计算机视觉领域,方法包括:首先获取目标物体从待标定相机不同位姿拍摄到的目标图像集合,并选取相邻序列的两张目标图像的作为初始图像对进行特征点提取与特征点匹配,得到特征点对;根据特征点对得到基础矩阵F;根据基础矩阵F得到初始图像对的初始三维点集;根据目标图像集合中的其他图像通过光束法平差对初始三维点集进行优化,得到优化后的所述待标定相机的参数。相比于现有技术来说,本申请实施例提供的相机标定方法有较高的精度和鲁棒性。