
基于激光点云数据优化拟合直线的方法、芯片及机器人.pdf

葫芦****io

1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于激光点云数据优化拟合直线的方法、芯片及机器人.pdf
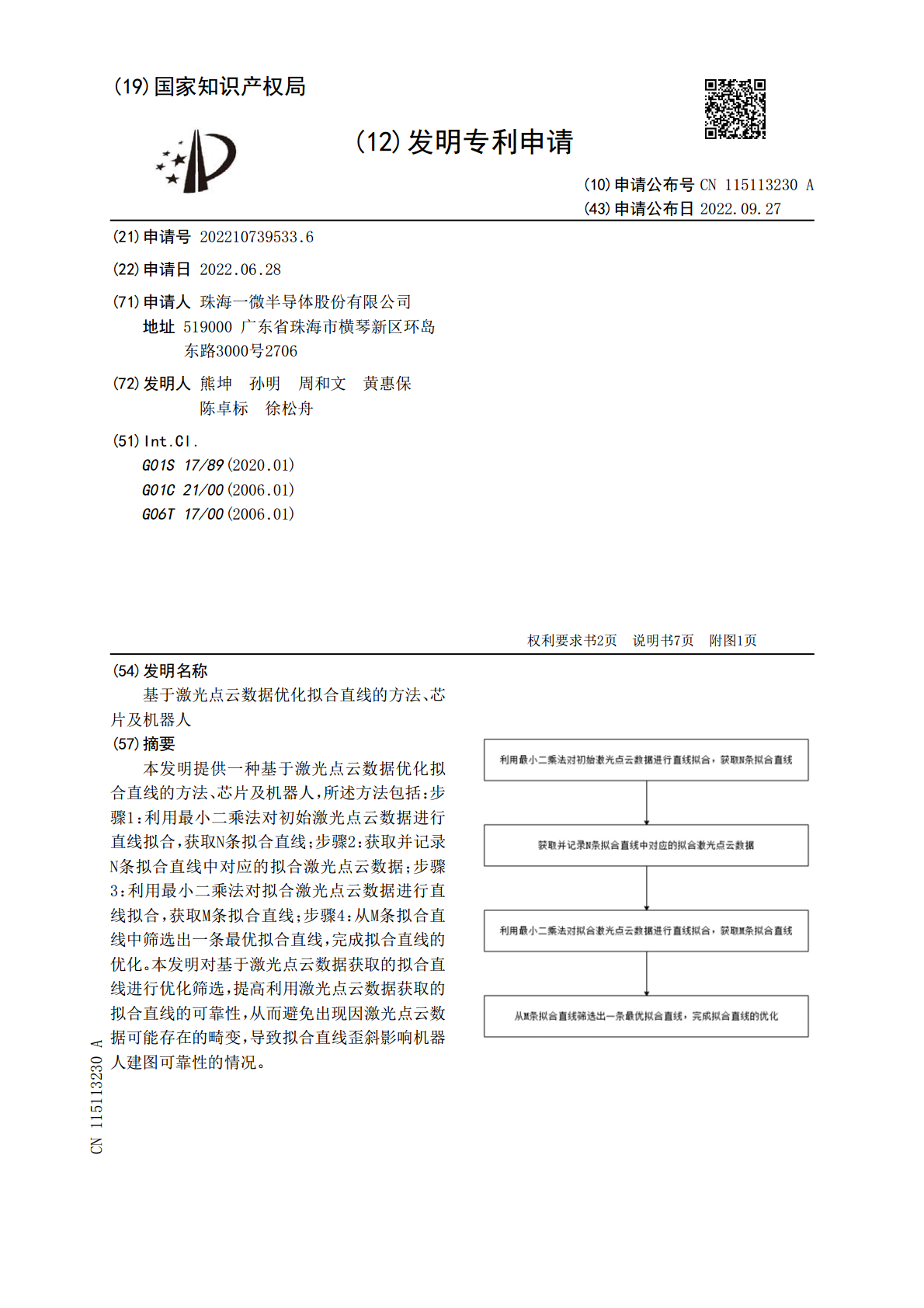
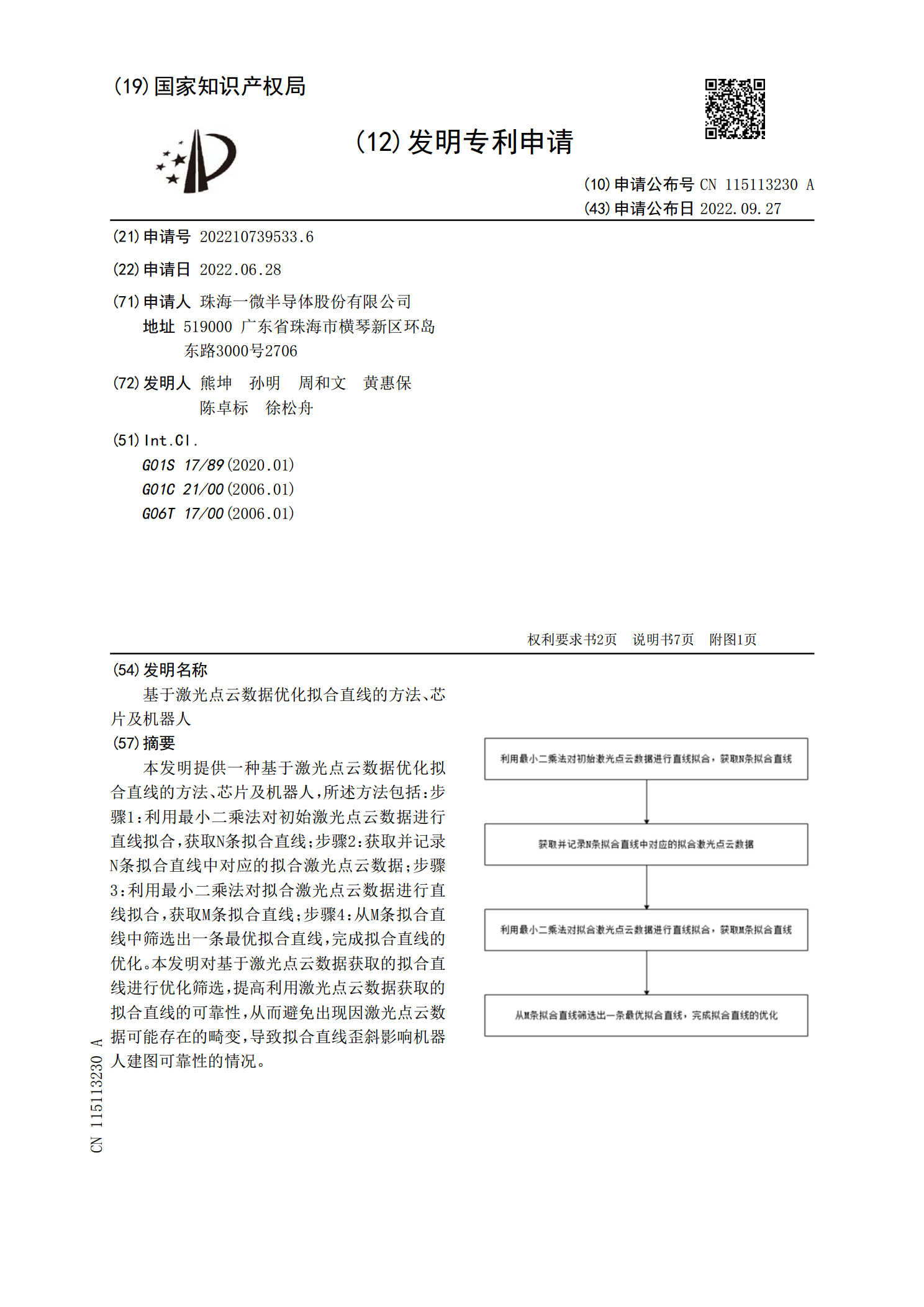
本发明提供一种基于激光点云数据优化拟合直线的方法、芯片及机器人,所述方法包括:步骤1:利用最小二乘法对初始激光点云数据进行直线拟合,获取N条拟合直线;步骤2:获取并记录N条拟合直线中对应的拟合激光点云数据;步骤3:利用最小二乘法对拟合激光点云数据进行直线拟合,获取M条拟合直线;步骤4:从M条拟合直线中筛选出一条最优拟合直线,完成拟合直线的优化。本发明对基于激光点云数据获取的拟合直线进行优化筛选,提高利用激光点云数据获取的拟合直线的可靠性,从而避免出现因激光点云数据可能存在的畸变,导致拟合直线歪斜影响机器人

基于激光点云数据的变电站巡检机器人导航方法研究.docx
基于激光点云数据的变电站巡检机器人导航方法研究摘要:随着电力行业技术的发展,机器人已成为现代电网巡检的重要工具之一,能够有效提高巡检效率和减轻人工劳动强度。本文以变电站为例,研究基于激光点云数据的巡检机器人导航方法。首先对机器人导航系统的基本组成和工作原理进行了介绍。接着对激光点云数据的获取和处理进行了详细阐述,并介绍了一种局部地图构建方法。最后通过仿真实验验证了该机器人导航方法的可行性和有效性。关键词:机器人导航;激光点云数据;变电站;局部地图;仿真实验Abstract:Withthedevelopme

基于大数据的激光点云边界探测方法.docx
基于大数据的激光点云边界探测方法基于大数据的激光点云边界探测方法摘要:随着激光扫描技术的快速发展,激光点云数据的应用领域不断扩大。激光点云边界探测是激光点云处理中的重要任务,它在地图构建、环境感知、机器人导航等领域具有重要的应用价值。本文提出了一种基于大数据的激光点云边界探测方法,通过利用大规模数据集进行边界分析和识别,进一步提高了边界探测的精度和效率。关键词:激光点云,边界探测,大数据,边界分析,边界识别引言:激光扫描技术可以快速获取场景的三维点云数据,这对于地图构建、环境感知和机器人导航等任务非常重要

基于Kriging算法与曲面拟合的三维激光扫描点云数据插值研究.docx
基于Kriging算法与曲面拟合的三维激光扫描点云数据插值研究随着现代技术的不断发展,三维激光扫描成为了一种非常重要的数据获取方式。当我们获取到一些三维激光扫描点云时,我们往往希望能够对这些点云进行插值,以便更加准确地反映出实际物体的形状和变化。因此,本文提出了基于Kriging算法和曲面拟合的三维激光扫描点云数据插值方法,对该方法进行了综合研究和分析。首先,我们需要了解一些关于Kriging算法和曲面拟合的基本原理。Kriging算法是一种常用的空间插值方法,它可以通过已知数据点来准确地预测未知点的值。
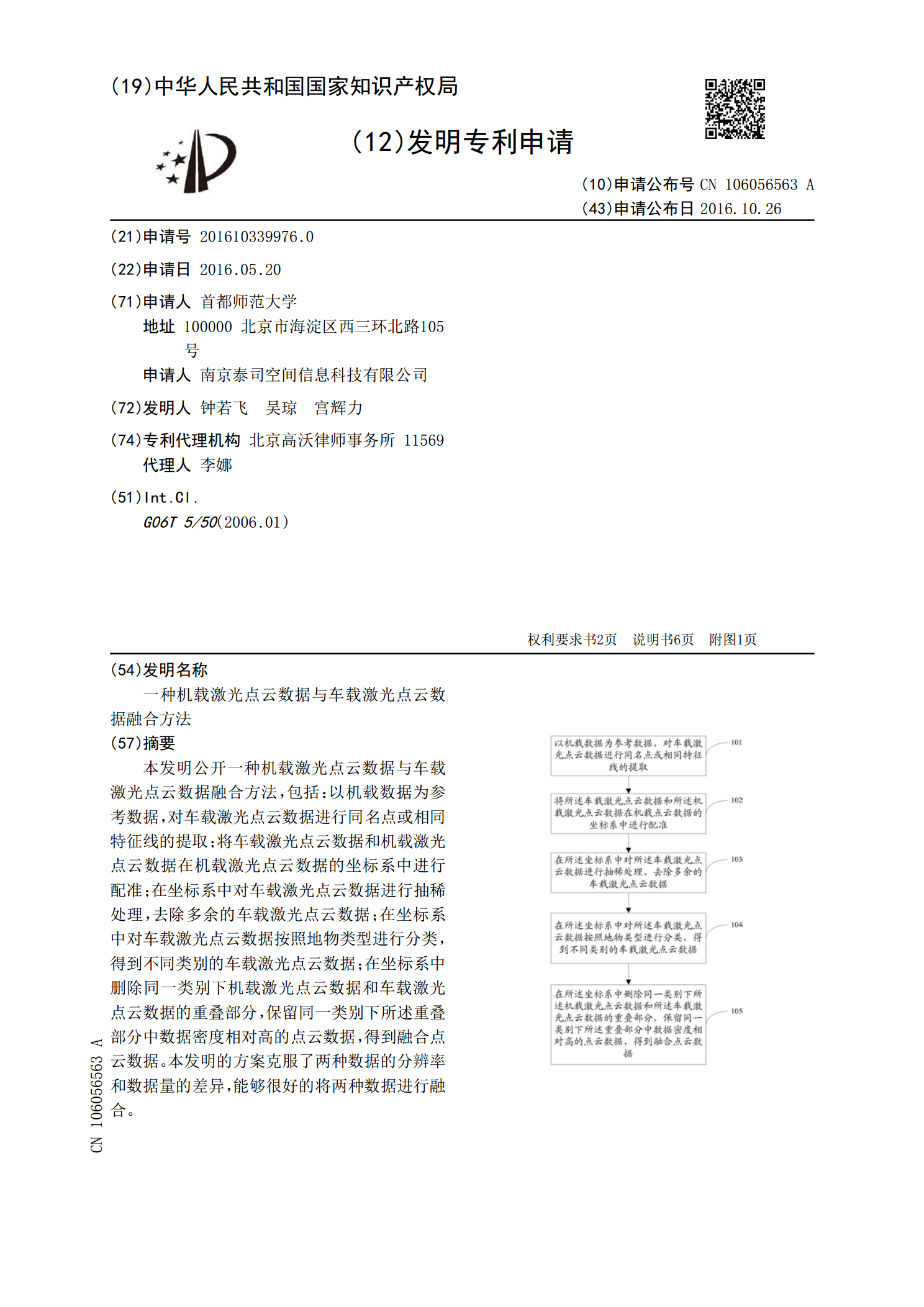
一种机载激光点云数据与车载激光点云数据融合方法.pdf
本发明公开一种机载激光点云数据与车载激光点云数据融合方法,包括:以机载数据为参考数据,对车载激光点云数据进行同名点或相同特征线的提取;将车载激光点云数据和机载激光点云数据在机载激光点云数据的坐标系中进行配准;在坐标系中对车载激光点云数据进行抽稀处理,去除多余的车载激光点云数据;在坐标系中对车载激光点云数据按照地物类型进行分类,得到不同类别的车载激光点云数据;在坐标系中删除同一类别下机载激光点云数据和车载激光点云数据的重叠部分,保留同一类别下所述重叠部分中数据密度相对高的点云数据,得到融合点云数据。本发明的