
一种面向大田环境的自动跟随运输平台及其控制方法.pdf

涵蓄****09


1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种面向大田环境的自动跟随运输平台及其控制方法.pdf
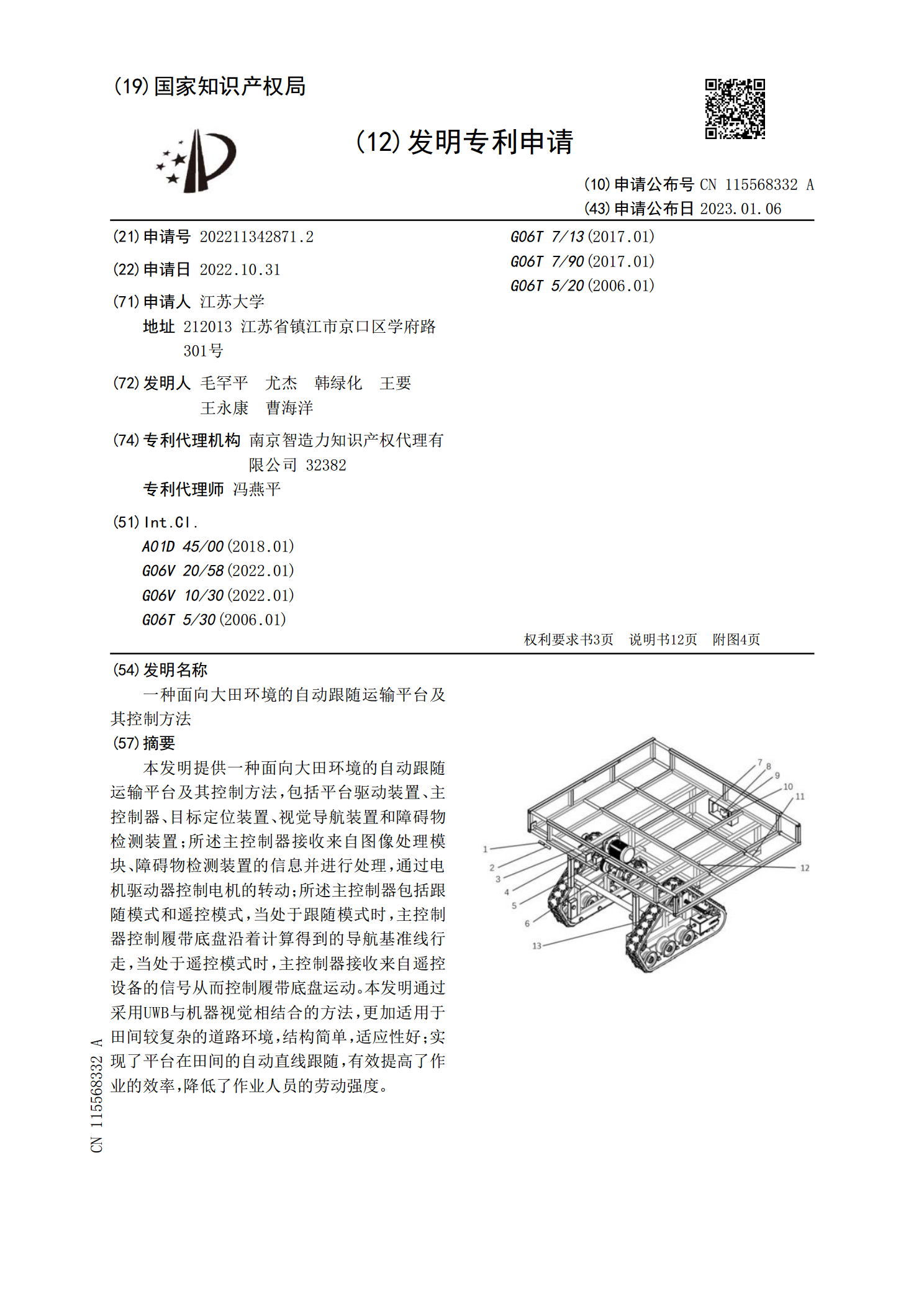
本发明提供一种面向大田环境的自动跟随运输平台及其控制方法,包括平台驱动装置、主控制器、目标定位装置、视觉导航装置和障碍物检测装置;所述主控制器接收来自图像处理模块、障碍物检测装置的信息并进行处理,通过电机驱动器控制电机的转动;所述主控制器包括跟随模式和遥控模式,当处于跟随模式时,主控制器控制履带底盘沿着计算得到的导航基准线行走,当处于遥控模式时,主控制器接收来自遥控设备的信号从而控制履带底盘运动。本发明通过采用UWB与机器视觉相结合的方法,更加适用于田间较复杂的道路环境,结构简单,适应性好;实现了平台在田
一种自跟随支撑运输平台及其控制方法.pdf
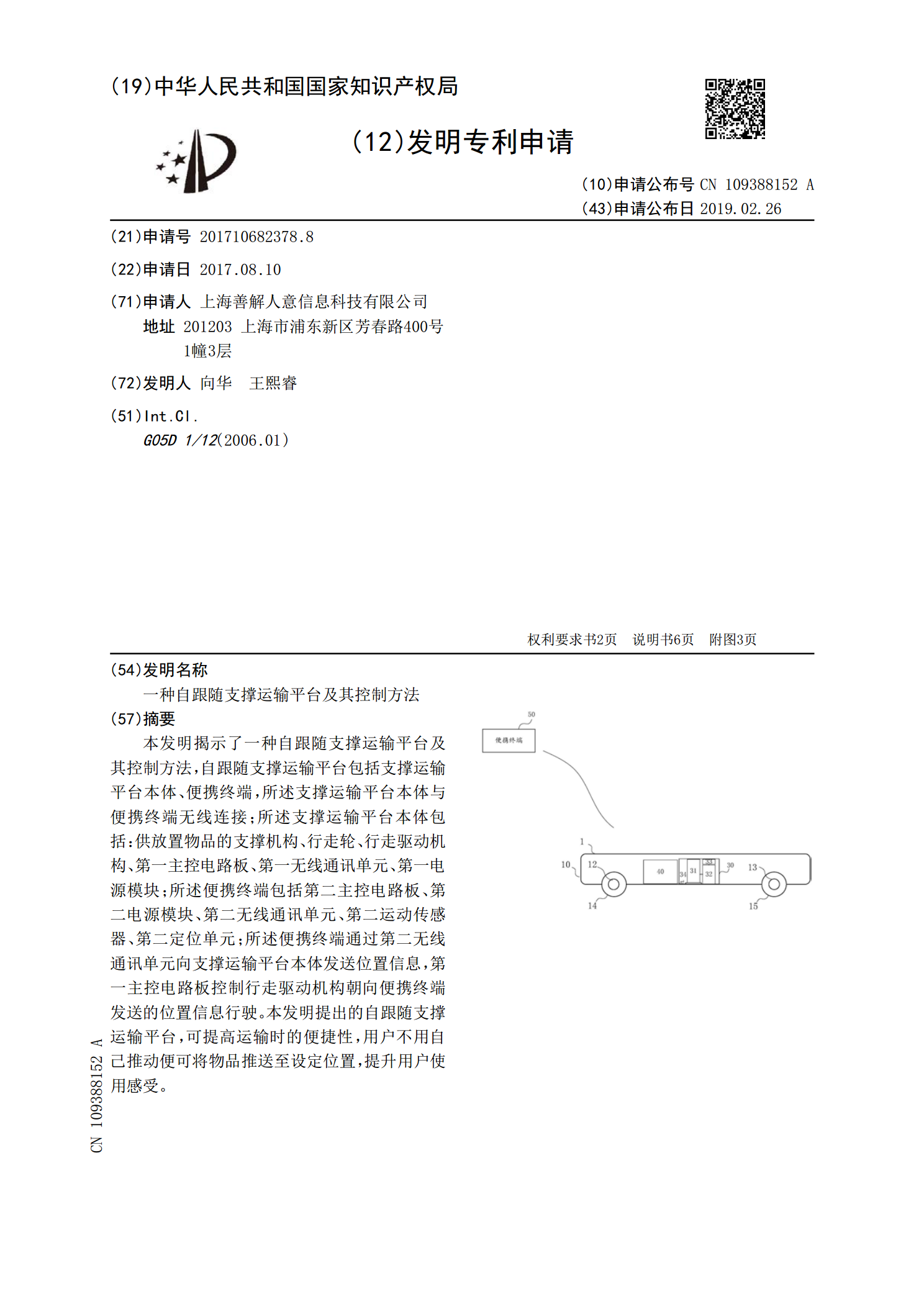
本发明揭示了一种自跟随支撑运输平台及其控制方法,自跟随支撑运输平台包括支撑运输平台本体、便携终端,所述支撑运输平台本体与便携终端无线连接;所述支撑运输平台本体包括:供放置物品的支撑机构、行走轮、行走驱动机构、第一主控电路板、第一无线通讯单元、第一电源模块;所述便携终端包括第二主控电路板、第二电源模块、第二无线通讯单元、第二运动传感器、第二定位单元;所述便携终端通过第二无线通讯单元向支撑运输平台本体发送位置信息,第一主控电路板控制行走驱动机构朝向便携终端发送的位置信息行驶。本发明提出的自跟随支撑运输平台,可
一种基于PD控制的自动跟随装置及其方法.pdf
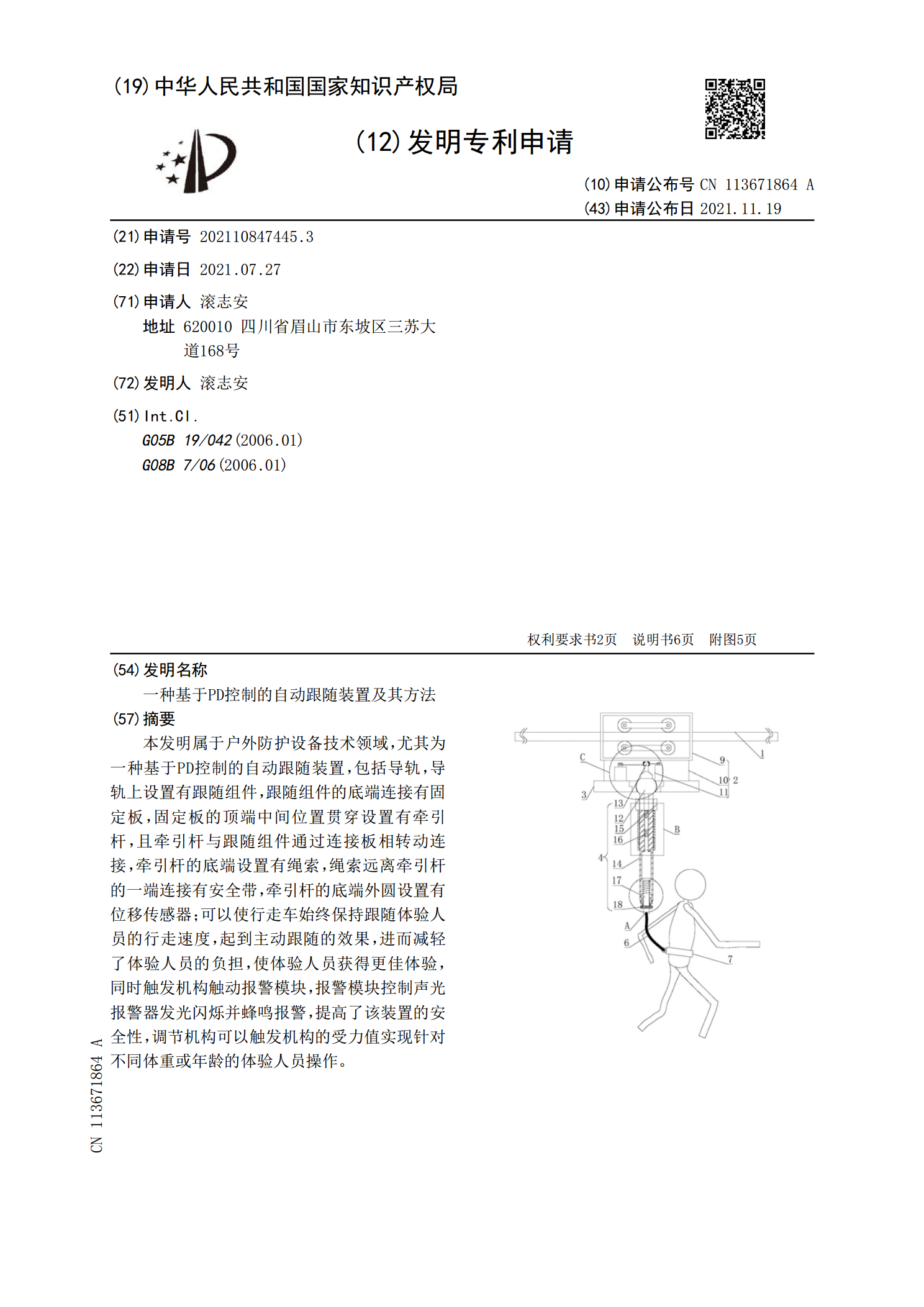
本发明属于户外防护设备技术领域,尤其为一种基于PD控制的自动跟随装置,包括导轨,导轨上设置有跟随组件,跟随组件的底端连接有固定板,固定板的顶端中间位置贯穿设置有牵引杆,且牵引杆与跟随组件通过连接板相转动连接,牵引杆的底端设置有绳索,绳索远离牵引杆的一端连接有安全带,牵引杆的底端外圆设置有位移传感器;可以使行走车始终保持跟随体验人员的行走速度,起到主动跟随的效果,进而减轻了体验人员的负担,使体验人员获得更佳体验,同时触发机构触动报警模块,报警模块控制声光报警器发光闪烁并蜂鸣报警,提高了该装置的安全性,调节机
一种自动跟随行李箱及其控制方法.pdf
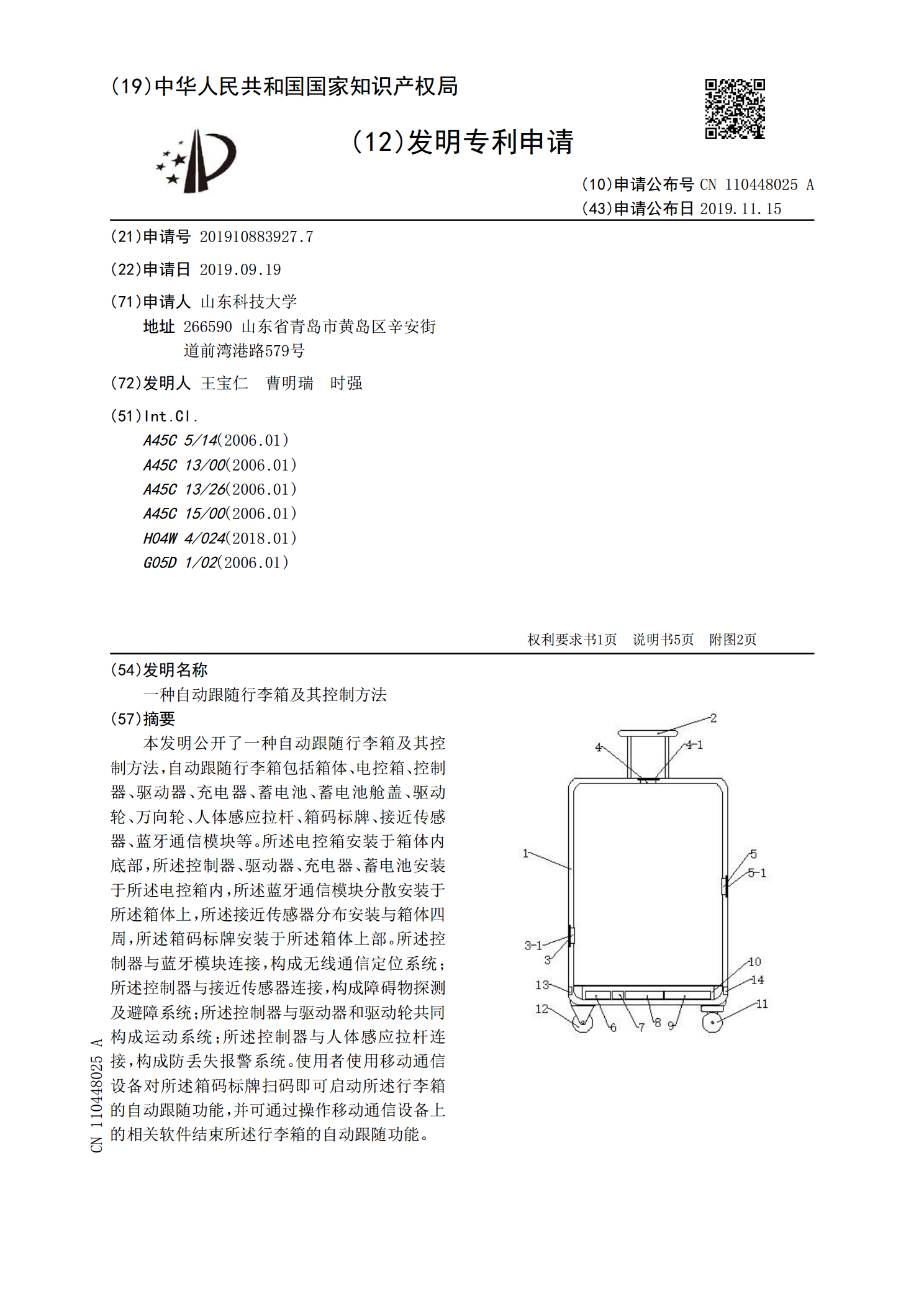
本发明公开了一种自动跟随行李箱及其控制方法,自动跟随行李箱包括箱体、电控箱、控制器、驱动器、充电器、蓄电池、蓄电池舱盖、驱动轮、万向轮、人体感应拉杆、箱码标牌、接近传感器、蓝牙通信模块等。所述电控箱安装于箱体内底部,所述控制器、驱动器、充电器、蓄电池安装于所述电控箱内,所述蓝牙通信模块分散安装于所述箱体上,所述接近传感器分布安装与箱体四周,所述箱码标牌安装于所述箱体上部。所述控制器与蓝牙模块连接,构成无线通信定位系统;所述控制器与接近传感器连接,构成障碍物探测及避障系统;所述控制器与驱动器和驱动轮共同构成

一种自动跟随机器人及其跟随方法.pdf
本发明公开一种自动跟随机器人及其跟随方法,包括底座、载板、太阳能控制器和PLC,所述底座上设置有左支撑架和右支撑架,所述左支撑架上设置有半圆载架,所述半圆载架上面设置有第一太阳能电池板,所述第一太阳能电池板与半圆载架相切,所述第一太阳能电池板设置有一个以上,所述第一太阳能电池板呈弧形等间距分布,所述底座上设置有分别与各个第一太阳能电池板对应的蓄电池,所述第一太阳能电池板和蓄电池均与太阳能控制器电性连接,所述左支撑架侧面设置有编码器,所述右支撑架上设置有电机,所述载板两侧分别与左支撑架和右支撑架转动连接;该