
车辆补偿控制方法、装置、设备、介质和产品.pdf

是向****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆补偿控制方法、装置、设备、介质和产品.pdf
本公开的实施例公开了车辆补偿控制方法、装置、设备、介质和产品。该方法的一具体实施方式包括:生成方向盘扭矩;根据方向盘扭矩,控制目标车辆在目标车道上行驶;根据目标车辆与目标车道的车道中心线的距离与目标车道的车道宽度,生成车道权重;基于对应目标车辆的可标定补偿手力矩和车道权重,生成第一方向盘补偿扭矩;基于车道权重、方向盘扭矩和第一方向盘补偿扭矩,生成第二方向盘补偿扭矩;将方向盘扭矩和第二方向盘补偿扭矩的差的绝对值确定为扭矩差绝对值;将第二方向盘补偿扭矩确定为目标方向盘扭矩;基于目标方向盘扭矩,控制目标车辆在车
车辆控制方法及装置、设备、介质和产品.pdf
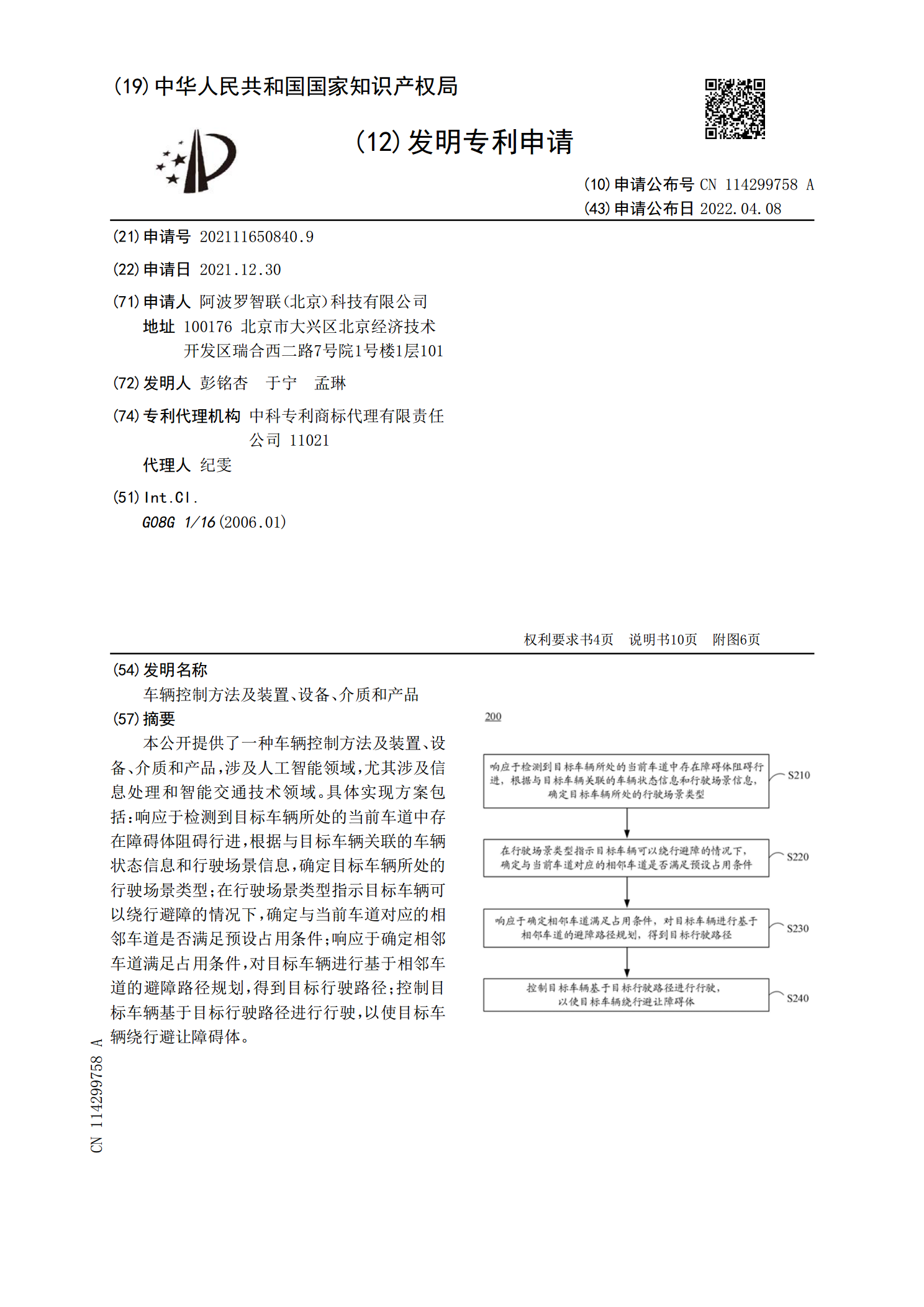
本公开提供了一种车辆控制方法及装置、设备、介质和产品,涉及人工智能领域,尤其涉及信息处理和智能交通技术领域。具体实现方案包括:响应于检测到目标车辆所处的当前车道中存在障碍体阻碍行进,根据与目标车辆关联的车辆状态信息和行驶场景信息,确定目标车辆所处的行驶场景类型;在行驶场景类型指示目标车辆可以绕行避障的情况下,确定与当前车道对应的相邻车道是否满足预设占用条件;响应于确定相邻车道满足占用条件,对目标车辆进行基于相邻车道的避障路径规划,得到目标行驶路径;控制目标车辆基于目标行驶路径进行行驶,以使目标车辆绕行避让
车辆控制方法、装置、设备、介质及产品.pdf
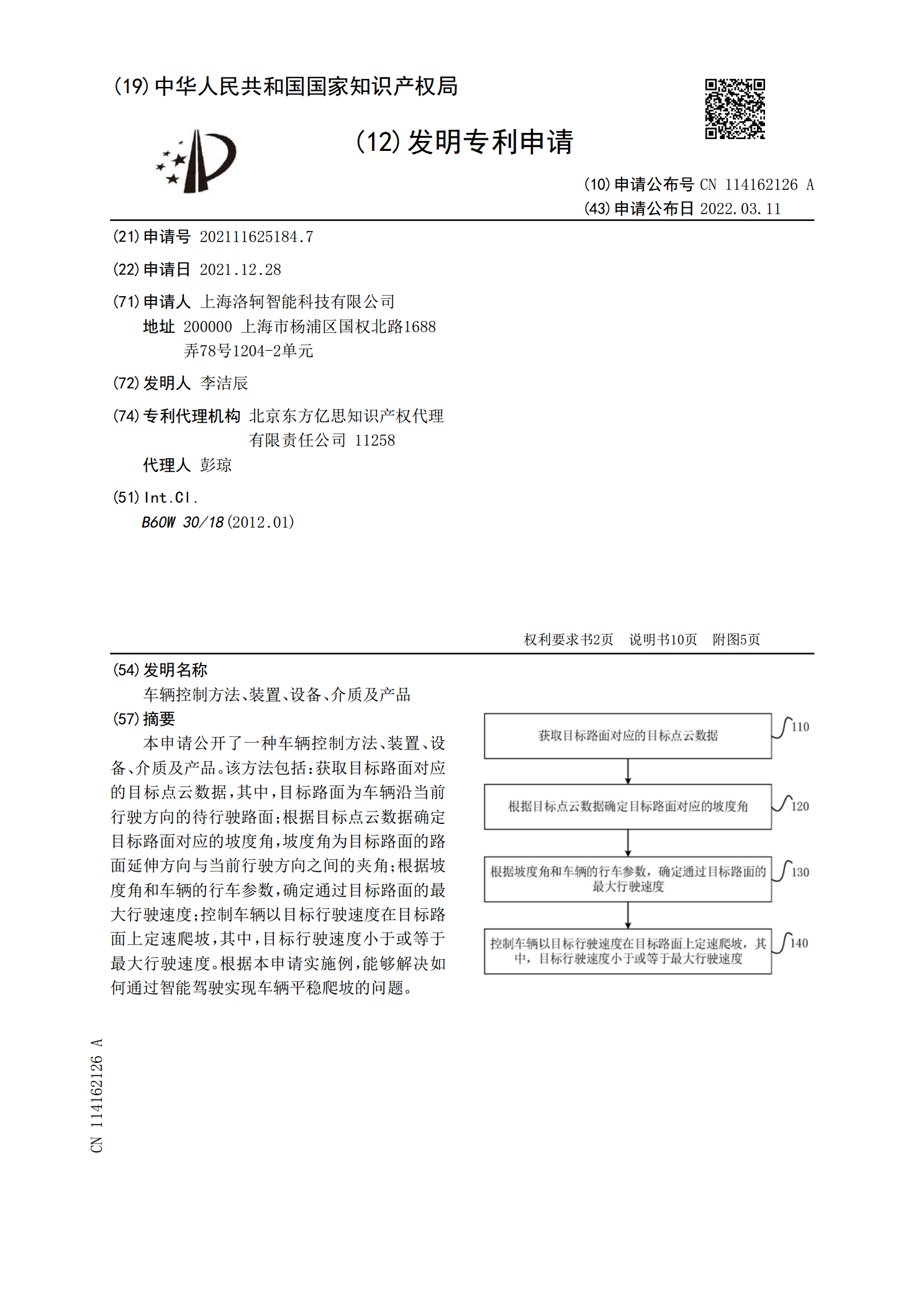
本申请公开了一种车辆控制方法、装置、设备、介质及产品。该方法包括:获取目标路面对应的目标点云数据,其中,目标路面为车辆沿当前行驶方向的待行驶路面;根据目标点云数据确定目标路面对应的坡度角,坡度角为目标路面的路面延伸方向与当前行驶方向之间的夹角;根据坡度角和车辆的行车参数,确定通过目标路面的最大行驶速度;控制车辆以目标行驶速度在目标路面上定速爬坡,其中,目标行驶速度小于或等于最大行驶速度。根据本申请实施例,能够解决如何通过智能驾驶实现车辆平稳爬坡的问题。
车辆控制方法、装置、设备、存储介质和程序产品.pdf
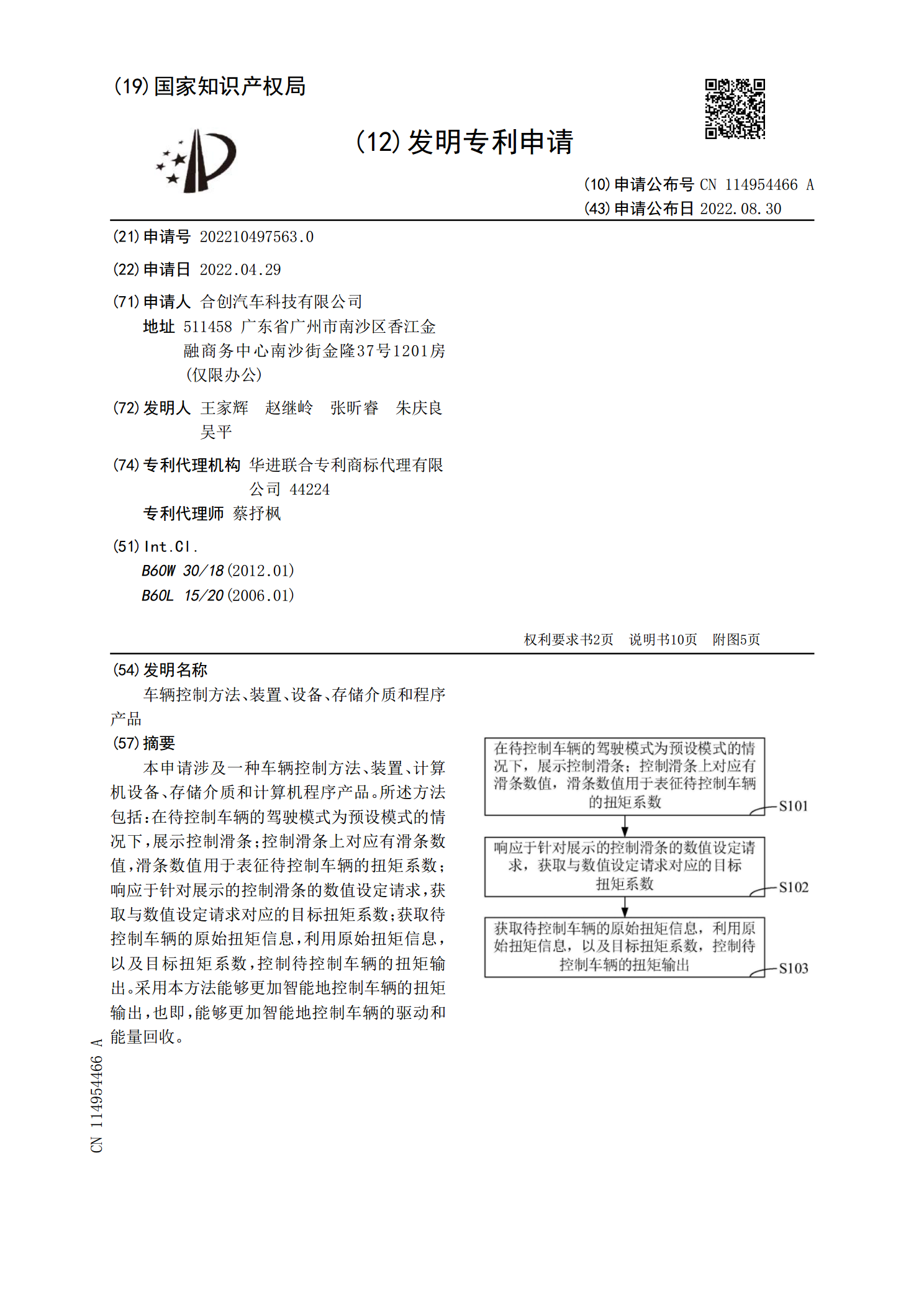
本申请涉及一种车辆控制方法、装置、计算机设备、存储介质和计算机程序产品。所述方法包括:在待控制车辆的驾驶模式为预设模式的情况下,展示控制滑条;控制滑条上对应有滑条数值,滑条数值用于表征待控制车辆的扭矩系数;响应于针对展示的控制滑条的数值设定请求,获取与数值设定请求对应的目标扭矩系数;获取待控制车辆的原始扭矩信息,利用原始扭矩信息,以及目标扭矩系数,控制待控制车辆的扭矩输出。采用本方法能够更加智能地控制车辆的扭矩输出,也即,能够更加智能地控制车辆的驱动和能量回收。
车辆控制方法和装置、介质、设备.pdf
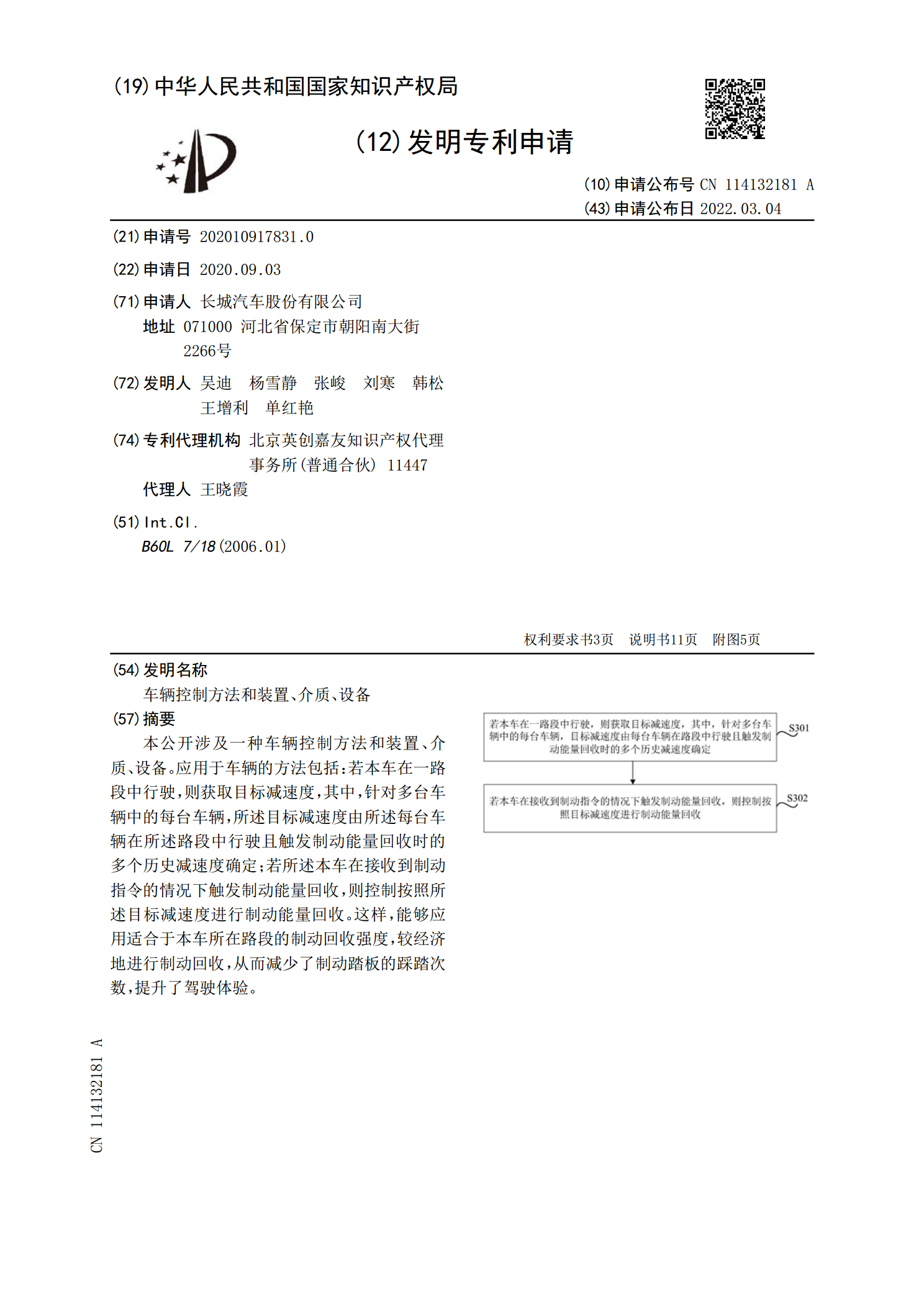
本公开涉及一种车辆控制方法和装置、介质、设备。应用于车辆的方法包括:若本车在一路段中行驶,则获取目标减速度,其中,针对多台车辆中的每台车辆,所述目标减速度由所述每台车辆在所述路段中行驶且触发制动能量回收时的多个历史减速度确定;若所述本车在接收到制动指令的情况下触发制动能量回收,则控制按照所述目标减速度进行制动能量回收。这样,能够应用适合于本车所在路段的制动回收强度,较经济地进行制动回收,从而减少了制动踏板的踩踏次数,提升了驾驶体验。